МІНІ-проект:«Автоматизація, комп’ютеризація технологічних процесів»

МІНІ-проект:«Автоматизація, комп’ютеризація технологічних процесів»ВИКОНАВЕЦЬ: ФІЛАТОВ ДАНІІЛКерівник: Дудник Л. А. ХЕРСОН2023 Херсонська гімназія № 28 Херсонської міської ради

В історії розвитку техніки вирізняють три етапи
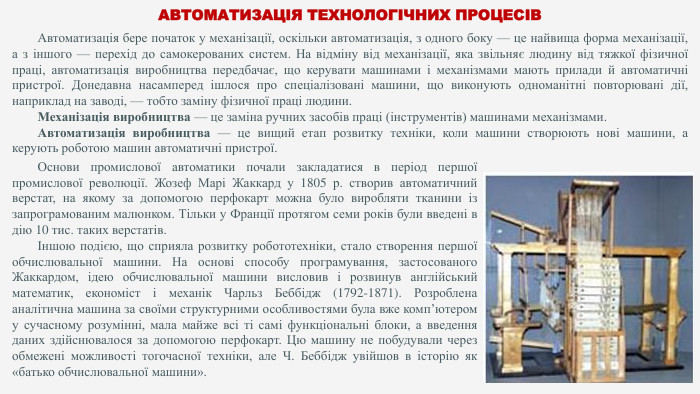
Автоматизація бере початок у механізації, оскільки автоматизація, з одного боку — це найвища форма механізації, а з іншого — перехід до самокерованих систем. На відміну від механізації, яка звільняє людину від тяжкої фізичної праці, автоматизація виробництва передбачає, що керувати машинами і механізмами мають прилади й автоматичні пристрої. Донедавна насамперед ішлося про спеціалізовані машини, що виконують одноманітні повторювані дії, наприклад на заводі, — тобто заміну фізичної праці людини. Механізація виробництва — це заміна ручних засобів праці (інструментів) машинами механізмами. Автоматизація виробництва — це вищий етап розвитку техніки, коли машини створюють нові машини, а керують роботою машин автоматичні пристрої.автоматизація технологічних процесів. Основи промислової автоматики почали закладатися в період першої промислової революції. Жозеф Марі Жаккард у 1805 р. створив автоматичний верстат, на якому за допомогою перфокарт можна було виробляти тканини із запрограмованим малюнком. Тільки у Франції протягом семи років були введені в дію 10 тис. таких верстатів.Іншою подією, що сприяла розвитку робототехніки, стало створення першої обчислювальної машини. На основі способу програмування, застосованого Жаккардом, ідею обчислювальної машини висловив і розвинув англійський математик, економіст і механік Чарльз Беббідж (1792-1871). Розроблена аналітична машина за своїми структурними особливостями була вже комп’ютером у сучасному розумінні, мала майже всі ті самі функціональні блоки, а введення даних здійснювалося за допомогою перфокарт. Цю машину не побудували через обмежені можливості тогочасної техніки, але Ч. Беббідж увійшов в історію як «батько обчислювальної машини».
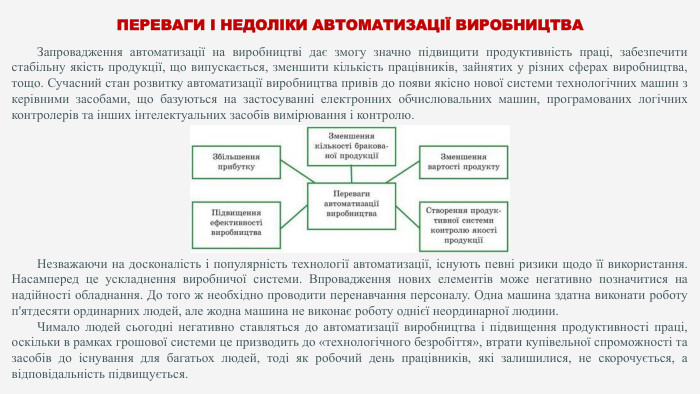
Переваги і недоліки автоматизації виробництва. Запровадження автоматизації на виробництві дає змогу значно підвищити продуктивність праці, забезпечити стабільну якість продукції, що випускається, зменшити кількість працівників, зайнятих у різних сферах виробництва, тощо. Сучасний стан розвитку автоматизації виробництва привів до появи якісно нової системи технологічних машин з керівними засобами, що базуються на застосуванні електронних обчислювальних машин, програмованих логічних контролерів та інших інтелектуальних засобів вимірювання і контролю. Незважаючи на досконалість і популярність технології автоматизації, існують певні ризики щодо її використання. Насамперед це ускладнення виробничої системи. Впровадження нових елементів може негативно позначитися на надійності обладнання. До того ж необхідно проводити перенавчання персоналу. Одна машина здатна виконати роботу п'ятдесяти ординарних людей, але жодна машина не виконає роботу однієї неординарної людини. Чимало людей сьогодні негативно ставляться до автоматизації виробництва і підвищення продуктивності праці, оскільки в рамках грошової системи це призводить до «технологічного безробіття», втрати купівельної спроможності та засобів до існування для багатьох людей, тоді як робочий день працівників, які залишилися, не скорочується, а відповідальність підвищується.
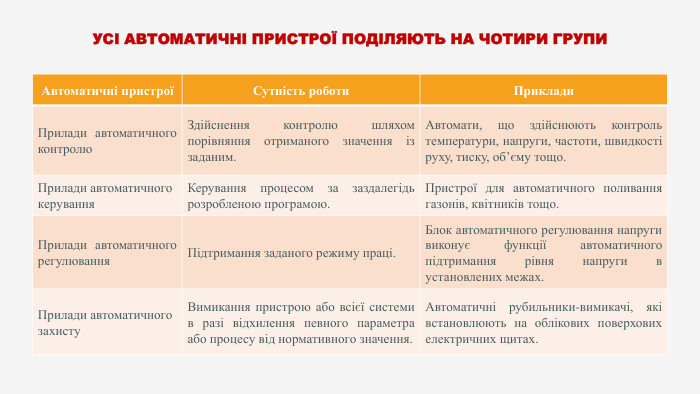
{5 C22544 A-7 EE6-4342-B048-85 BDC9 FD1 C3 A}Автоматичні пристроїСутність роботи. Приклади. Прилади автоматичного контролю. Здійснення контролю шляхом порівняння отриманого значення із заданим. Автомати, що здійснюють контроль температури, напруги, частоти, швидкості руху, тиску, об’єму тощо. Прилади автоматичногокерування. Керування процесом за заздалегідь розробленою програмою. Пристрої для автоматичного поливання газонів, квітників тощо. Прилади автоматичного регулювання. Підтримання заданого режиму праці. Блок автоматичного регулювання напруги виконує функції автоматичного підтримання рівня напруги в установлених межах. Прилади автоматичногозахисту. Вимикання пристрою або всієї системи в разі відхилення певного параметра або процесу від нормативного значення. Автоматичні рубильники-вимикачі, які встановлюють на облікових поверхових електричних щитах. Усі автоматичні пристрої поділяють на чотири групи

I етап автоматизації: Розробка, створення і використання у виробництві окремих робочих машин і верстатів-автоматів. У цей період з’явилися універсальні верстати з ручним управлінням, універсальні та спеціалізовані напівавтомати й автомати. Універсальний верстат – верстат, придатний для виконання багатьох технологічних операцій. Автомат — машина (або їх сукупність), що здійснює за заданою програмою, без участі людини, процеси отримання, перетворення, передавання й використання енергії, матеріалу та інформації. Напівавтомат — машина, що самостійно здійснює один повний робочий цикл і потребує зовнішнього втручання лише для повторення циклу (наприклад, завантаження-розвантаження, встановлення заготовки тощо). Спеціалізовані напівавтомати й автомати використовують для виробництва певних видів продукції.
II етап автоматизації: Розробка і впровадження систем автоматичних машин (автоматичних ліній), початок комп’ютеризації виробництва. За масового виробництва технологічний процес передбачав, що робоча деталь передається вздовж довгого ряду машин, кожна з яких виконує певну операцію. У кожної машини був оператор, який мав передавати деталь з конвеєра на машину, закріплювати, вмикати привід та ін. — тобто людина виконувала роль «підсобника» машини. Щоб оптимізувати процес, потрібно було забезпечити автоматичне переміщення деталі від машини до машини, вмикання і вимикання приводу та ін. 1954 року американські інженери Джордж Девол і Джозеф Енгельбергер розробили спосіб переміщення предметів між різними виробничими ділянками на основі керівної програми на перфокартах (подібної до Жаккардової). Створений ними перший у світі промисловий робот був впроваджений на виробничій лінії заводу General Motors, штат Нью-Джерсі. Уже перед Першою світовою війною з’явилися автоматизовані універсальні токарні верстати, на яких заготовка проходить послідовно 6–8 позицій, і на кожній такій позиції може відбуватися операція свердління, заточування, нарізання, розгортки. В Україні одна з перших автоматичних ліній почала працювати в 1947 р. на Харківському тракторному заводі. На ній обробляли головки циліндрів для двигунів. Автоматична лінія (АЛ) — це система машин, розташованих відповідно до послідовності технологічного процесу, що пов’язана єдиною транспортною системою, має єдину систему автоматичного управління і призначена для виконання всіх технологічних операцій без участі людини. Людина має виконувати початкове налагодження устаткування й усувати проблеми.

У цей період починається впровадження комп’ютерів у виробництво, що відбувалося у двох напрямах:— створення систем комп’ютерного керування автоматами, верстатами з ЧПК (числовим програмним керуванням), автоматичними лініями, промисловими роботами;— автоматизація обробки технологічної інформації (наприклад, САПР - система автоматизованого проектування). Одним із результатів об’єднання електронно-обчислювальної машини й металообробного верстата стали верстати з ЧПК, які давали змогу без участі людини встановлювати заготовку, обробляти її різними інструментами і відправляти готовий виріб для подальшої обробки.

Поява систем програмування зумовила створення промислових роботів (ПР) — гнучкого обладнання, яке придатне до ефективної роботи в мінливих умовах. Промисловий робот — автономний пристрій, що складається з механічного маніпулятора (для відтворення рухових функцій руки людини) і системи управління, яку можна перепрограмовувати. Застосовується для переміщення об’єктів у просторі й для виконання різних виробничих операцій, таких як зварювання, фарбування, складання, завантаження устаткування, переміщення тощо. Слово «робот» вперше вжив як похідне від чеського слова robota (панщина, примусова праця), у п'єсі «R. U. R.» («Россумські універсальні роботи») чеський письменник Карел Чапек (1890-1938). Німецька компанія KUKA створила Z-форму маніпулятора, що забезпечує три поступальні і три обертальні рухи. Універсальний маніпулятор може пакувати, комплектувати, пакетувати, виконувати зварювання і паяння, обробляти метал і пластмасу, формувати вироби, обслуговувати й тестувати промислове обладнання. Причому він може працювати як у холодильних камерах, так і в ливарних цехах. 2014 року маніпулятор KUKA навіть зіграв партію з чемпіоном світу з настільного тенісу. Поштовхом до появи маніпуляторів промислового застосування став початок ядерної епохи. 1947 року в США під керівництвом Раймонда Гьорца розробили перший автоматичний електромеханічний маніпулятор з копіювальним управлінням, що повторював рухи людини-оператора і був призначений для переміщення радіоактивних матеріалів — роботи, яку не могла виконати людина.

Робот, який активно взаємодіє з довкіллям, загалом має містити такі системи: керівну, інформаційно-вимірювальну (сенсорну), систему зв’язку, виконавчу (моторну).• Керівна, або інтелектуальна система — «мозок» робота. Важлива функція цієї системи — розпізнавання ситуацій і моделювання середовища функціонування робота, планування дій і прийняття цілеспрямованих рішень, програмування й оптимізація рухів, а також організація спілкування робота з людиною і пристроями.• Інформаційно-вимірювальна, або сенсорна система — «органи чуття» робота, призначені для сприйняття і перетворення інформації про стан довкілля і самого робота. Як елементи сенсорної системи використовують телевізійні та оптико-електронні пристрої, лазерні та ультразвукові далекоміри, акустичні датчики, тактильні, контактні й індукційні датчики, а також датчики положення, швидкості, сил тощо.• Система зв’язку — «мова» робота, слугує для передачі сигналів інформації між системами робота, а також для організації обміну інформацією між роботом і людиною або іншими роботами і пристроями.• Виконавча, або моторна система — це пристрої, призначені для прямого впливу на навколишні об’єкти або взаємодії з ними відповідно до сигналів керування, що формулюються інформаційно-вимірювальною системою чи безпосередньо оператором. Як елементи моторної системи використовують приводи (двигуни), передавальні пристрої (передачі), маніпулятори та ін.
III етап автоматизації: Комплексна автоматизація. Комплексна автоматизація передбачає автоматичне виконання всіх виробничих операцій, зокрема допоміжних, транспортних, однак за людиною залишаються функції загального управління і контролю. За повної автоматизації автоматизуються навіть функції загального управління і контролю. Джозеф Енгельбергер, засновник і президент першої у світі робототехнічної фірми Unimation, якого визнають «батьком сучасної промислової робототехніки», вважає, що фахівці, створюючи сучасних роботів, мають дотримуватися законів робототехніки, які сформулював американський учений і письменник-фантаст Айзек Азімов. Промислових роботів використовують уже кілька десятиліть, але їхнє поширення стримувала висока ціна і негнучкість використання (тобто робот «спеціалізувався» на виконанні певних операцій, і його важко було переналаштувати на інші). Технологічні прориви, передусім у галузі програмного забезпечення, створили роботів, що здатні пристосовуватися до змін у виробничому циклі. Водночас роботи дешевшають — настільки, що їх стає вигідно використовувати навіть у країнах із традиційно дешевою робочою силою. А європейські й американські компанії переносять свої потужності ближче до споживачів своєї продукції. Раніше працівник завдяки автоматизації отримував досконаліші інструменти для роботи, які підвищували його продуктивність, а отже, й добробут, — а тепер роботи самі стають працівниками, що забирають робочі місця у людей. Автоматизація та високі технології починають конкурувати з людиною — передусім там, де йдеться про кваліфіковану одноманітну працю, де висока ціна помилки. Причому йдеться і про фізичну, і про розумову працю.

Роботизація як основа сучасної автоматизаціїТри закони робототехніки:• 1. Робот не може зашкодити людині або своєю бездіяльністю сприяти заподіянню їй шкоди.• 2. Робот має виконувати накази людини, крім тих, які суперечать першому закону.• 3. Робот має забезпечувати власну безпеку, крім тих випадків, коли це суперечить першому і другому законам. На сучасних автоматизованих виробництвах промислові роботи виконують безліч завдань:• палетизація і депалетизація;• упакування продукції;• сортування продукції;• маркування та нанесення етикеток;• переробка та обробка харчових продуктів;• дугове і точкове зварювання;• плазмове різання;• лазерне різання і зварювання;• полірування, зачищення, шліфування;• завантаження верстатів;• фрезерування і свердління;• обслуговування ливарних машин;• обслуговування пресів;• збирання;• фарбування;• нанесення клею і герметиків.
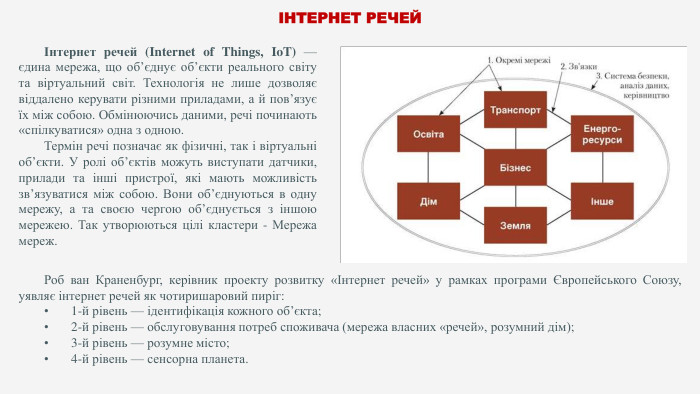
Інтернет речейІнтернет речей (Internet of Things, Io. T) — єдина мережа, що об’єднує об’єкти реального світу та віртуальний світ. Технологія не лише дозволяє віддалено керувати різними приладами, а й пов’язує їх між собою. Обмінюючись даними, речі починають «спілкуватися» одна з одною. Термін речі позначає як фізичні, так і віртуальні об’єкти. У ролі об’єктів можуть виступати датчики, прилади та інші пристрої, які мають можливість зв’язуватися між собою. Вони об’єднуються в одну мережу, а та своєю чергою об’єднується з іншою мережею. Так утворюються цілі кластери - Мережа мереж. Роб ван Краненбург, керівник проекту розвитку «Інтернет речей» у рамках програми Європейського Союзу, уявляє інтернет речей як чотиришаровий пиріг:• 1-й рівень — ідентифікація кожного об’єкта;• 2-й рівень — обслуговування потреб споживача (мережа власних «речей», розумний дім);• 3-й рівень — розумне місто;• 4-й рівень — сенсорна планета.
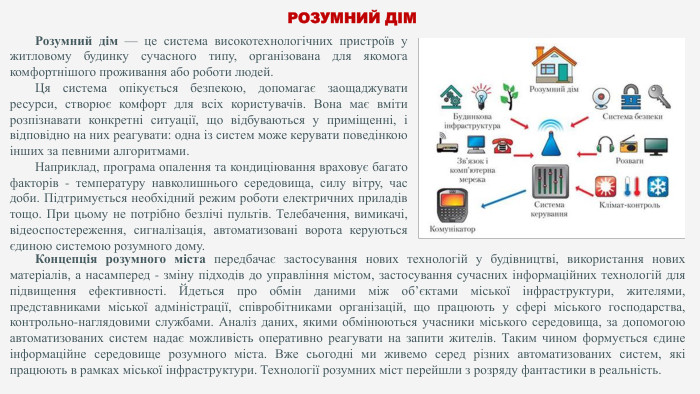
Розумний дім. Розумний дім — це система високотехнологічних пристроїв у житловому будинку сучасного типу, організована для якомога комфортнішого проживання або роботи людей. Ця система опікується безпекою, допомагає заощаджувати ресурси, створює комфорт для всіх користувачів. Вона має вміти розпізнавати конкретні ситуації, що відбуваються у приміщенні, і відповідно на них реагувати: одна із систем може керувати поведінкою інших за певними алгоритмами. Наприклад, програма опалення та кондиціювання враховує багато факторів - температуру навколишнього середовища, силу вітру, час доби. Підтримується необхідний режим роботи електричних приладів тощо. При цьому не потрібно безлічі пультів. Телебачення, вимикачі, відеоспостереження, сигналізація, автоматизовані ворота керуються єдиною системою розумного дому. Концепція розумного міста передбачає застосування нових технологій у будівництві, використання нових матеріалів, а насамперед - зміну підходів до управління містом, застосування сучасних інформаційних технологій для підвищення ефективності. Йдеться про обмін даними між об’єктами міської інфраструктури, жителями, представниками міської адміністрації, співробітниками організацій, що працюють у сфері міського господарства, контрольно-наглядовими службами. Аналіз даних, якими обмінюються учасники міського середовища, за допомогою автоматизованих систем надає можливість оперативно реагувати на запити жителів. Таким чином формується єдине інформаційне середовище розумного міста. Вже сьогодні ми живемо серед різних автоматизованих систем, які працюють в рамках міської інфраструктури. Технології розумних міст перейшли з розряду фантастики в реальність.


про публікацію авторської розробки
Додати розробку