Позакласне заняття.Керування роботами за допомогою датчиків відстані та освітленості.
- Конспект уроку.doc doc
- Творчі завдання.doc doc
- Учням.doc doc
- в колі.mp4 mp4
- Показати всі файли
Тема: Керування роботами за допомогою датчиків відстані та освітленості.
Мета:
- Навчити учнів керувати роботами за допомогою, датчиків освітленості, та відстані. На практиці застосовувати теоретичні знання.
- Виховати культуру поведінки на ПК, дисциплінованість, вміння приймати індивідуальні рішення.
- Розвинути в учнів логічного мислення, алгоритмічної, інформаційної та графічної культури, пам’ять, увагу.
Обладнання: Набор Lego Mindstorms 2.0, ноутбук, мультимедійна дошка, проектор.
I етап. Організаційний етап - 2 хв.
- Привітання.
- Перевірка присутності.
II етап. Постановка мети і завдань уроку. Мотивація навчальної діяльності учнів - 5 хв.
- Так, що ж таке робот?
- Ще яких роботів ви знаєте?
- Яких роботів використовують в житті, в побуті
- Для чого потрібні роботи? Навіщо людина їх винаходить?
В аптеках Шанхая працюють роботи - фармацевти. Треба просто натиснути на сенсорний екран з описом симптомів, і робот поставить діагноз і дасть необхідні рекомендації. Далі залишається тільки запропонувати автомату купюру , і ліки можна забирати.
Роботи- санітари . Працюють в деяких британських лікарнях. Роботи виробляє суху і вологе прибирання , самі викидають сміття , заправляються миючими засобами і заряджаються . На відміну від живих прибиральниць , роботи ніколи не бубонять під ніс і відрізняються доброзичливим ставленням до оточуючих. Зустрівши когось на своєму шляху , вони вибачаються і доповідають , чим вони зараз зайняті.
У Південній Кореї сконструювали сторожового робопса для охорони приватних садиб. Пес важить 40 кг , в його ніс вбудована фотокамера , а в корпусі є стільниковий телефон , який негайно посилає сигнал господарю у разі виявлення небезпеки . У критичних випадках робот здатний сам викликати поліцію.
III етап. Актуалізація системи знань, умінь і навичок учнів, необхідних для сприйняття і осмислення нового матеріалу, в т.ч. первинна перевірка розуміння - 10 хв.
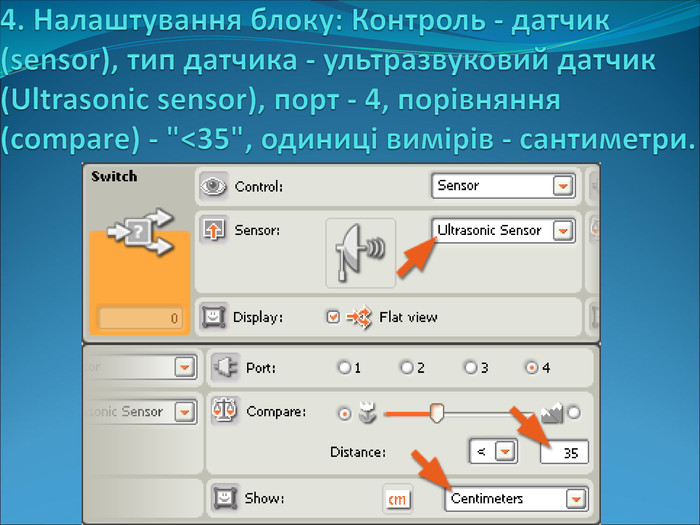
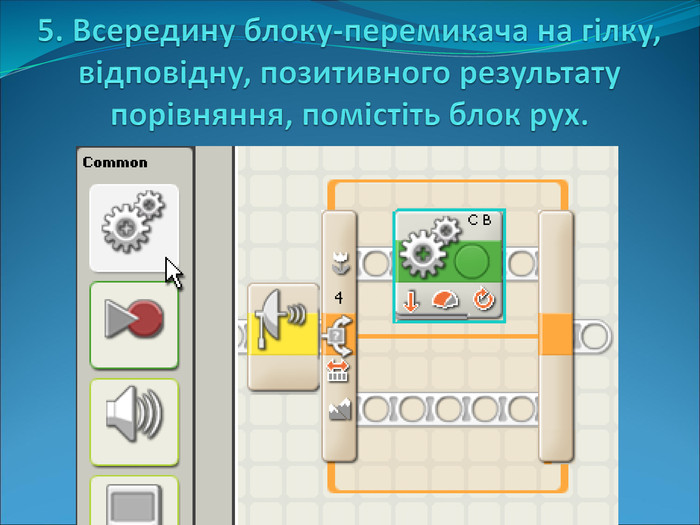
Завдання 1. Ультразвуковий датчик повинен керувати роботом.
Залежно від відстані до перешкоди робот повинен або наближатися, або віддалятися. Якщо відстань перевищує 35 см, то він наближається, якщо менше 35 см, то віддаляється. (Презентація, слайди 2-11.)
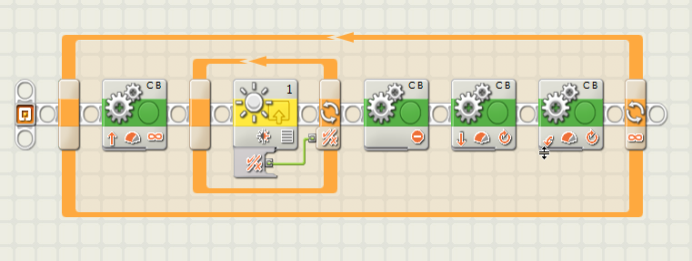
Завдання 2. Робот довільно переміщається в межах ігрового поля, не залишаючи його. (Презентація, слайди 12-14.)
IV етап. Організація засвоєння способів діяльності шляхом відтворення інформації в її творчому застосуванні за зразком і вирішення проблемних завдань.
Практична робота «Керування роботами за допомогою датчиків відстані та освітленості. » 23- хв.. (Інструктаж для виконання практичної роботи).
Творчі завдання:
а) Рух уздовж чорної лінії.
б) Переміщення предмета за чорну лінію, за допомогою датчика дотику.
V етап.
Підведення підсумків уроку (контроль засвоєння, обговорення допущених помилок і їх корекція). 5 –хв.
Предмет
 лінії
лінії
Керування роботами за допомогою
датчиків відстані та освітленості.
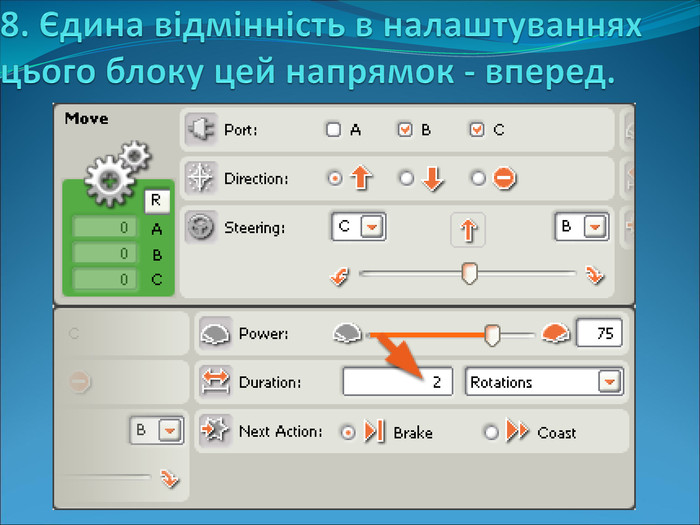
Мотори: B, С.
Порти:
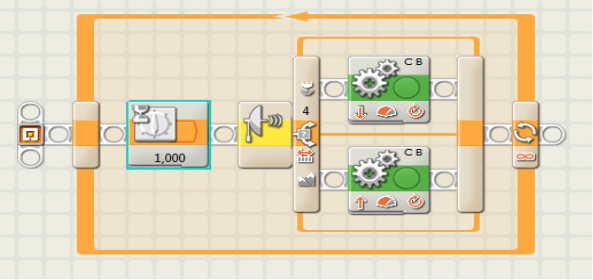
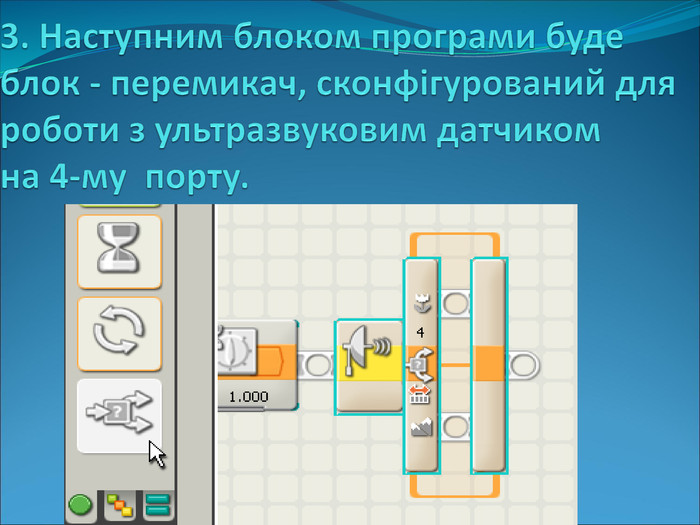
Датчик відстані – 4.
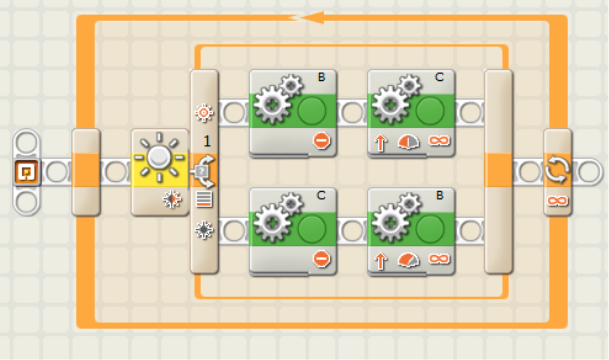
Датчик освітленості – 1.
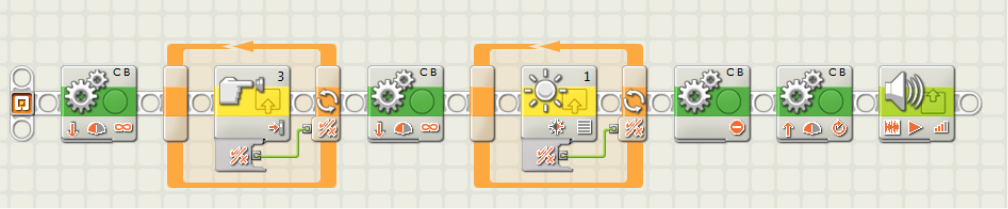
Датчик дотику – 3.
- Ультразвуковий датчик повинен керувати роботом.
- Робот довільно переміщається в межах ігрового поля, не залишаючи його.
- Творчі завдання:
а) Рух уздовж чорної лінії.
б) Переміщення предмета за чорну лінію, за допомогою датчика дотику.


Залежно від відстані до перешкоди робот повинен або наближатися, або віддалятися. Якщо відстань перевищує 35 см, то він наближається, якщо менше 35 см, то віддаляється.



Переміщення вперед до тих пір, поки датчик кольору не визначить чорний колір. Зупинка. Повернення назад. Поворот. Повтор кроків 1-4.

про публікацію авторської розробки
Додати розробку