Система управління вертольотом Мі-8. Повздовжньо-поперечне управління.
МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
ВІДОКРЕМЛЕНИЙ СТРУКТУРНИЙ ПІДРОЗДІЛ
«СЛОВ'ЯНСЬКИЙ ФАХОВИЙ КОЛЕДЖ
НАЦІОНАЛЬНОГО АВІАЦІЙНОГО УНІВЕРСИТЕТУ»
(ВСП «СФК НАУ»)

МЕТОДИЧНА РОЗРОБКА
відкритого заняття
" СИСТЕМА УПРАВЛІННЯ ВЕРТОЛЬОТОМ МИ-8П/Т/МТВ "
з дисципліни Конструкція і технічне обслуговування повітряних суден
спеціальність 272 «Авіаційний транспорт»
освітньо-професійна програма: Технічне обслуговування повітряних суден і
двигунів освітньо-професійний ступінь: фаховий молодший бакалавр
СЛОВ'ЯНСЬК, 2024
Методична розробка відкритого заняття з дисципліни «Конструкція і технічне обслуговування повітряних суден».
Підготував РЄЗНІК А.В. - викладач першої кваліфікаційної категорії Відокремленого структурного підрозділу «Слов'янський фаховий коледжу
Національного авіаційного університету» - 2024р.
Викладено методику проведення лекції із застосуванням засобів дистанційного навчання (googlemeet, classtime, google-презентація) та цифрових інструментів, як засобу формування професійної компетентності фахівців авіаційного транспорту в умовах дистанційного навчання, спрямованої на набуття студентами теоретичних знань та якісного засвоєння навчального матеріалу з теми "Система управління вертольотом Мі-8П/Т/МТВ".
Для викладачів ц/к "Конструкція і технічне обслуговування повітряних суден" та закладів фахової передвищої освіти з підготовки авіаційних фахівців.
РЕЦЕНЗЕНТИ:
ТЯГНІЙ В.Г. – професор навчального відділу Кременчуцького льотного коледжу Харківського національного університету внутрішніх справ, викладач циклової комісії аеронавігації, кандидат технічних наук, старший науковий співробітник, спеціаліст вищої категорії, викладач-методист.
СУЛІМАН О.М. – викладач вищої кваліфікаційної категорії, викладач – методист, завідувач відділення Відокремленого структурного підрозділу
«Слов'янського фахового коледжу Національного авіаційного університету».
Розглянуто та схвалено на засіданні циклової комісії Конструкції, технічного обслуговування і авіоніки повітряних суден (протокол № 6 від 09.01. 2024р.).
Голова ц/к ____ А. Рєзнік
ЗМІСТ
стор.
Передмова 5
План заняття 6
Хід заняття 8
1. Організаційний момент 8
2. Ознайомлення студентів із темою заняття 8
3. Мотивація навчання 8
4. Актуалізація опорних знань 8
5. Коментар відповідей та робіт студентів 9
6. Викладення та вивчення нового матеріалу 10
7. План лекції 10
7.1 Загальні відомості про систему управління вертольотом.
Загальна принципова схема. 10
7.2 Система поздовжньо-поперечного управління: схема, елементи. 12 7.3 Робота системи в повздовжній та поперечній
лініях управління вертольотом. 15
7.4Призначення механізмів завантаження ліній
управління та електромагнітних гальм ЕМТ-2М. 19
8. Закріплення теоретичних знань 24
9. Коментар роботи студентів 25
10. Підсумок заняття 25
11. Домашнє завдання 25
Список використаних джерел 26
Висновок 27
Рецензії 28 ПЕРЕДМОВА
Темою методичної розробки відкритого заняття обрано "Система управління вертольотом Мі-8П/Т/МТВ", як одну з основних відповідальних системи в експлуатації даного типу повітряного судна.
Вибір даної теми обумовлений тим, що відповідно до освітньо-професійної програми та Стандарту підготовки фахового молодшого бакалавра за спеціальністю «Авіаційний транспорт» у здобувачів освіти мають формуватися професійні компетентності фахівців авіаційного транспорту, що супроводжуються формуванням вмінь фахівця проводити аналіз технічного стану системи, агрегатів та їх технічне обслуговування, базуючись при цьому на настановах нормативно-технічної документації, положеннях, інструкціях, бюлетенях, директивах норм льотної придатності, стандартних угодах ІАТА, EASA, ІКАО, дотримуючись вимог охорони праці та правил техніки безпеки.
Методична мета заняття полягає в удосконаленні методики проведення лекції із застосуванням мультимедійної спеціалізованої наочності та цифрових інструментів, як засобу формування професійної компетентності фахівців авіаційного транспорту в умовах дистанційного навчання.
Навчальна мета лекції полягає у формуванні у студентів загальних та спеціальних компетентностей, щодо призначення, принципової схеми та сумісної роботи елементів всіх мереж системи управління вертольотом.
Виховна мета спрямована на виховання у студентів свідомого самостійного ставлення до навчання, дисциплінованості, відповідальності, ініціативності, уважності при технічному обслуговуванні елементів систем управління.
Розвивальна мета полягає розвитку у здобувачів освіти аналітичного та творчого мислення під час аналізу роботи системи під час експлуатації АТ та складання алгоритму дій при виявленні дефекту/несправності в роботі всієї системи.
ПЛАН ЗАНЯТТЯ
"26" січня 2024р.
(дата заняття)
Група: 1М20
Спеціальність: 272 Авіаційний транспорт
Освітньо-професійна програма: Технічне обслуговування повітряних суден і двигунів.
Тема заняття: "Система управління вертольотом Мі-8П/Т/МТВ".
Мета заняття:
Методична - удосконалення методики інтерактивної форми проведення лекції із застосуванням мультимедійної спеціалізованої наочності та цифрових інструментів, як засобу формування професійної компетентності фахівців авіаційного транспорту в умовах дистанційного навчання.
Навчальна – розглянути основні конструктивні вузли основних каналів системи управління вертольотом та сформувати навички в питання технічної експлуатації системи управління вертольоту Мі-8.
Виховна - виховувати наполегливість у досягненні поставленої мети, самостійність роботи над навчальним матеріалом, відповідальності за якісне виконання технологічних операцій згідно з нормативними документами щодо експлуатації авіаційної техніки.
Розвивальна - розвиток синтезуючого мислення, вміння творчо підходити до вирішення нестандартних ситуацій.
Вид заняття: лекція
Вид лекції: тематична лекція
Форма проведення заняття: розповідь з елементами бесіди
Міжпредметні зв'язки:
Забезпечувальні
• Конструкція авіаційної техніки
• Експлуатація авіаційної техніки,
• Основи гідравліки;
• Гідропневмопристрої авіаційної техніки.
Забезпечувані
"Основи технічної діагностики", "М17А. Повітряні гвинти", «Авіаційні ПММ».
Методичне забезпечення:
Google-презентація: «Система управління вертольотом», "Поздовжньо-поперечне управління вертольотом», «Пружинний механізм завантаження", «Електромагнітні гальма ЕМТ-2М»; опорний конспект; спеціалізований електронний підручник за типом техніки (англійська мова). Відео матеріал з роботи основних органів управління вертольотом.
Агрегат: Гідроупор лінії повздовжнього управління.
Тестові завдання: платформа CLASSTIME.
Література:
Обов'язкова:
1. Вертоліт Мі-8. Інструкція з технічної експлуатації. Книга 1. Планер і силова установка. Воєніздат 1980р.
2. Вертоліт Мі-8. Технологія виконання регламентних робіт і підготовки до польотів. До єдиного регламенту технічної експлуатації вертольота Мі-8. Частина 1, розділ 1. Підготовка до польотів. Машинобудування 1975р.
3. Вертоліт Мі-8. Технологія виконання регламентних робіт і підготовки до польотів. До єдиного регламенту технічної експлуатації вертольота Мі-8. Частина 1, розділ 2. Регламентні роботи. Машинобудування 1975р.
Додаткова:
1.http://cnit.ssau.ru/vertolet/mi8/index.htm . Навчальний посібник з дисципліни "Конструкція і ТО ПС" (вертоліт Мі-8).
Технічні засоби навчання:
Персональний комп’ютер, засоби дистанційного навчання Google та інші інтернет платформи цифрових інструментів навчання.
ХІД ЗАНЯТТЯ
1. Організаційний момент 2 хв.
1.1 Привітання студентів
Викладач приймає звіт старости, вітається зі студентами.
1.2 Підготовка до заняття, перевірка наявності студентів.
Викладач перевіряє наявність студентів, заповнює електронний журнал.
2. Ознайомлення студентів із темою заняття
Тема: Система управління вертольотом Мі-8П/Т/МТВ.
3. Мотивація навчання 2хв.
Основна діяльність майбутніх авіаційних фахівців авіаційної техніки спрямована на організацію та забезпечення своєчасної та якісної підготовки повітряного судна до льотної експлуатації. У підготовку авіаційної техніки до вильоту входять роботи з візуального огляду та перевірки системи, щодо правильного регулювання. Тому знання з розміщення елементів системи управління на гелікоптері (ручки управління, механізми завантаження, електромагнітні гальма, гермовиводи, регулювальні покажчики, тандери, бустери…) є професійними для майбутніх авіаційних фахівців.
Знання роботи та конструкції основних елементів системи управління вертольотом зводить до мінімуму ризики неправильного технічного обслуговування системи в процесі експлуатації повітряного судна та зменшує рівень травматизму технічного персоналу в системі технічної експлуатації.
4. Актуалізація опорних знань 4 хв.
Проводиться в усній формі на початку заняття та по ходу викладання матеріалу лекції.
4.1 Для чого призначена система управління будь-якого повітряного судна, чи то літак, чи то вертоліт або ж безпілотний літальний апарат?
Правильна відповідь:
Система управління призначена для відхилення рульових поверхонь для забезпечення руху ПС по заданій траєкторії, а також для балансування в заданих режимах польоту.
4.2 В чому різниця в керованих поверхнях вертольоту від літака?
Правильна відповідь:
На літаку керованими поверхнями є кермо напрямку, кермо висоти та механізація крила, а на вертольоті керованими поверхнями виступають лопаті несучого та рульового гвинтів, кут атаки яких змінюється завдяки лініям управління вертольоту.
4.3 Вкажіть відмінність між неавтоматичним та автоматичним управлінням ?
Правильна відповідь:
В неавтоматичних системах управління повністю покладено на пілота/льотчика (зусилля створюються мускульною силою), а в автоматичних системах зусилля, що необхідні для відхилення рульових поверхонь створюються електричними або ж гідравлічними приводами.
4.4 Для чого призначені педалі в лініях ножного управління літаком та вертольтом?
Правильна від повідь:
Педалі призначені для шляхового управління. На літаках – управління кермом напрямку, а на вертольоті – рульовим гвинтом.
4.5 Яке пряме призначення мають гідропідсилювачі?
Правильна відповідь:
Гідравлічні підсилювачі використовуються в автоматичних системах управління та призначена для зняття навантажувальних зусиль на командних важелях управління (ручки, штурвали, педалі, рульові колонки, джойстики).
5. Коментар відповідей та робіт студентів 1хв.
Викладач визначає рівень теоретичної обізнаності здобувачів освіти. Відзначає прізвища студентів, які брали активну участь у відповідях, дає рекомендації щодо відвідування консультацій тим, хто показав слабкі знання.
6. Викладення та вивчення нового матеріалу 55 хв.
7. План лекції
7.1 Загальні відомості про систему управління вертольотом. Загальна принципова схема.
7.2 Система поздовжньо-поперечного управління: схема, елементи.
7.3 Проводка управління.
7.4 Призначення механізмів завантаження ліній управління, електромагнітних гальм ЕМТ-2М та гідроупору.
7.1. ЗАГАЛЬНІ ВІДОМОСТІ ПРО СИСТЕМУ УПРАВЛІННЯ.
В ході лекції для наочності викладач демонструє відеофільм «Загальні відомості про систему управління вертольотом. Загальна принципова схема».
Під управлінням вертольотом розуміють дії льотчика, спрямовані на відновлення порушеної рівноваги вертольота або порушення наявної рівноваги. Тобто, система управління вертольота призначена для зміни положення вертольота в просторі та режиму його польоту, а також для приведення в дію допоміжних агрегатів систем вертольота.
Таким чином, для зміни положення гелікоптера в просторі, є система управління (Рис.7.2. ), яка включає в себе чотири основні незалежні канали:
Ø подвійне поздовжньо-поперечне управління з двома ручками, що кінематично пов’язані з автоматом перекосу - (ручне управління);
Ø подвійне управління рульовим гвинтом з двома парами педалей, що кінематично пов’язані з рульовим гвинтом - (ножне управління);
Ø подвійне управління «ШАГ-ГАЗ», в якому дві ручки ШАГ-ГАЗ кінематично пов’язані з повзуном автомату перекосу та ричагами насосів регуляторів основних двигунів – (ручне управління);
та додаткові канали управління:
•роздільне керування двигунами;
•управління переналаштуванням частоти обертання несучого гвинта;
•управління зупинкою двигунів;
•керування електромагнітними гальмами пружинних механізмів завантаження; керування гальмом несучого гвинта; управління гальмами коліс.
Повздовжнє та поперечне управління здійснюється льотчиком, який відхиляючи ручку управління, змінює нахил тарілки автомату перекосу, що викликає циклічну зміну кута встановлення лопатей в різних азимутальних положеннях, і як наслідок, змінюється напрям рівнодіючої сили тяги НГ Рис.7.1. .
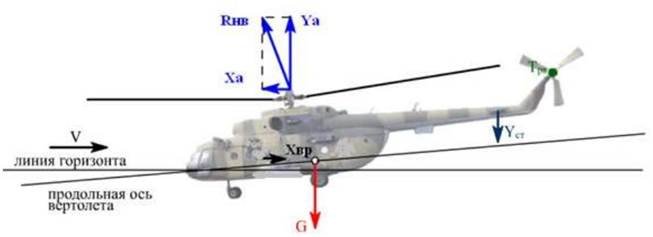
Рис.7.1. - Схема сил при польоті вертольоту
Поздовжнє управління досягається відхиленням ручки циклічного кроку вперед або назад. Таке відхилення призводить до зміни циклічного кроку і завалу конуса обертання гвинта, що несе, у відповідний відхиленню ручки бік. Одночасно виникає момент щодо поперечної осі. Під дією поздовжнього моменту вертоліт змінює кут тангажу.
Поперечне управління вимагає відхилення ручки циклічного кроку вправо або вліво, що тягне за собою зміну циклічного кроку і відповідний завал конуса обертання несучого гвинта. Поперечний момент, що виникає відносно поздовжньої осі, змінює кут крену вертольота.
Шляхове управління здійснюється відхиленням педалей. У результаті змінюється крок, а, отже, і сила рульового гвинта. Момент тяги рульового гвинта врівноважує реактивний момент несучого гвинта. Зміна моменту тяги призводить до розвороту вертольота в той бік, куди відхиляється педаль.
Для вертикального переміщення вертольота (вгору або вниз) змінюється величина тяги несучого гвинта за допомогою ручки "ШАГ-ГАЗ" шляхом одночасної зміни загального кроку несучого гвинта і режиму роботи двигунів.
При цьому поздовжній і поперечний канали розглядають спільно, оскільки вони мають один і той самий важіль управління і загальний принцип впливу на орган управління - несучий гвинт.
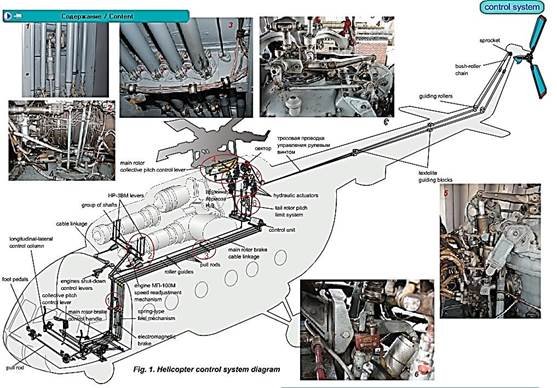
Рис.7.2. - Загальна принципова схема управління (мовою оригінал)
7.2. СИСТЕМА ПОЗДОВЖНЬО-ПОПЕРЕЧНОГО УПРАВЛІННЯ: СХЕМА, ЕЛЕМЕНТИ.
Поздовжньо-поперечне управління призначене для зміни кутів положення вертольота за креном і тангажем.
Поздовжнє і поперечне управління здійснюється льотчиком, який, відхиляючи ручку циклічного кроку, змінює нахил тарілки автомата перекосу, що спричиняє відповідну циклічну зміну кроку гвинта, який несе гвинт. Унаслідок зміни напрямку рівнодійної сили тяги несучого гвинта виникають поздовжній або поперечний моменти, які змушують гелікоптер змінювати своє положення в просторі за креном або тангажем.
Крім того, зміна складових векторів рівнодіючої сили тяги несучого гвинта призводить до зміни швидкості польоту гелікоптера і до переміщення гелікоптера вправо або вліво.
Поздовжньо-поперечне управління подвійне з проводкою жорсткої конструкції, включає до свого складу Рис.7.3. :
- дві колонки управління (права і ліва ручки циклічного кроку);
- проводка управління з двома комбінованими агрегатами управління КАУ-30Б;
- агрегат ПППУ і УОШ (поздовжнього, поперечного, колійного управлінь і управління загальним кроком);
- пружинні завантажувальні механізми;
- електромагнітні гальма ЕМТ-2М;
- гідроупор у каналі поздовжнього керування; - автомат перекосу.
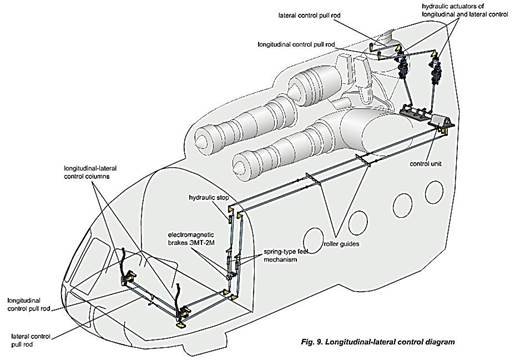
Рис.7.3. - Принципова схема поздовжньо-поперечного управління (мовою оригіналу)
Крім того, у проводці поздовжнього керування встановлено два балансувальні вантажі для гасіння можливих низькочастотних коливань. Один вантаж включено в конструкцію лівої ручки циклічного кроку, другий - розміщено на верхній кутовій гойдалці, встановленій на шпангоуті № 5Н. Органом управління є несучий гвинт.
Одна лінія проводки з агрегатом управління призначена для поздовжнього, інша - для поперечного управління.
Рух ручки циклічного кроку (вперед-назад, ліворуч-праворуч) передається відповідною лінією проводки керування через систему тяг і качалок до розташованого в редукторному відсіку вертольота агрегату поздовжнього, поперечного, колійного управлінь і керування загальним кроком. Вихідні хиталки агрегату ПППУ і УОШ з'єднані з вхідними ланками комбінованих агрегатів управління КАУ-30Б. Силовий шток одного гідропідсилювача КАУ-30Б з'єднаний з гойдалкою поздовжнього управління, а інший - з гойдалкою поперечного управління автомата перекосу. Таким чином, керуюче переміщення колонки керування призводить до нахилу тарілки автомата перекосу, яка визначає закон циклічної зміни кроку несучого гвинта.
Ручка циклічного кроку (РЦШ) призначена для передавання керівних зусиль від льотчика в проводку управління. На нижньому кінці ручки приварено ричаг, а у верхньому – закріплено рукоятку РУ-2 (Рис.7.4. ). На рукоятці 4 кнопки: куркова кнопка СПУ-РАДИО, кнопка увімкн. автопілоту, кнопка управл. спец.обл. (зброя в військовій модифікації), кнопка ТРИМЕР (управл. ЭМТ-2М). Крім того, на рукоятці лівої ручки управління встановлено важіль (гашетка) гальмування коліс. Для утримання важеля в загальмованому положенні під час стоянки вертольота на рукоятці РЦШ є фіксатор.
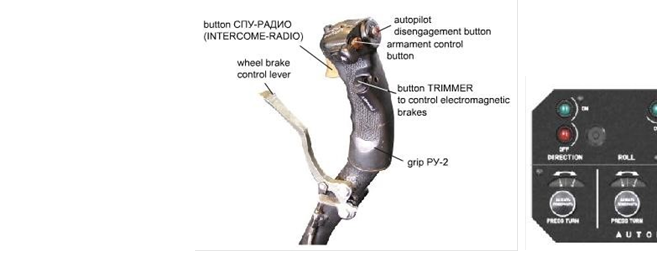
Рис.7.4. - Ручка управління (Control column) Рис.7.5. - Пульт управл. АП-34Б (Avtopilot control panel)
Права і ліва ручки циклічного кроку аналогічні за конструкцією.
![]() ПИТАННЯ ДО АУДИТОРІЇ. (з курсуМ8. Основи аеродинаміки).
ПИТАННЯ ДО АУДИТОРІЇ. (з курсуМ8. Основи аеродинаміки).
Пригадайте з курсу Основи аеродинаміки значення термінів управління повітряним судном по тангажу, крену та курсу.
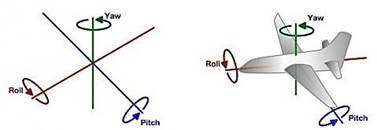
ВІДПОВІДЬ: Крен (Roll), Тангаж (Pitch), Рискання (Курс, Yaw) - три кута повороту, що відповідають трьом кутам Ейлера, що задають орієнтацію апарату відносно нормальної системи координат (відносно його центру інерції по трьом вісям)
Управління вертольотом по тангажу та крену може відбуватись і в режимі комбінованого управління. Ручне управління за допомогою агрегатів управління зводиться до переміщення їх золотників з затратою невеликих зусиль при відхиленні ручок управління, а при комбінованому управлінні виконуючі штоки агрегатів управління переміщуються в залежності від величини і напряму відхилення ручок управління і одночасно від величини зазорів і знаку електричних сигналів стабілізації на входах приводів відповідних сигналів автопілоту, що збільшує стійкість вертольоту. Увімкнення комбінованого управління здійснюється лампами-кнопками на пульті управління автопілотом ( Рис.7.5) а вимкнення – кнопками, що розміщені на лівій та правій ручках управління або на пульті управління автопілоту.
Конструкція ручки циклічного кроку.
РЦШ являє собою вигнуту сталеву трубу, до одного кінця якої приварено важіль, а на верхньому кінці закріплено рукоятку РУ-2 з кнопками Рис.7.4. . Електроприводи від кнопок прокладені всередині ручки і приєднуються до штепсельного роз’єму. У важіль ручки впресовані два підшипники, які фіксують ручку в корпусі. Болт кріплення ручки є віссю її поздовжнього переміщення. До нижньої частини важеля кріпиться шарнірна тяга, другий кінець якої з'єднаний із верхньою качалкою. З метою гасіння низькочастотних коливань у проводці керування на верхній качалці лівої ручки циклічного кроку закріплено балансувальний вантаж. На осі верхньої качалки знизу встановлено двоплечу качалку, одне плече якої з'єднується через тяги з другою ручкою управління, а друге передає зусилля в проводку поздовжнього каналу управління. Корпус виготовлений штампуванням з алюмінієвого сплаву і болтами жорстко кріпиться до стакану. У нижній частині корпусу є гребінка для кріплення тяг. В одному вушку кріпиться тяга, що з'єднує ліву ручку з правою, в іншому - тяга проводки поперечного керування. Стакан виконаний зі сталі. Він встановлюється в розточці кронштейна на двох шарикопідшипниках і виконує роль осі в поперечному управлінні. Підшипники змащуються мастилом ЦИАТИМ-201 через прес-маслянки кронштейна. Кронштейн відлитий із магнієвого сплаву МЛ5, має фланець для кріплення до підлоги кабіни екіпажу і прилив для кріплення осі качалок поздовжнього керування.
У кронштейні виконано два отвори для фіксації ручки в середньому положенні: - у поздовжньому напрямку через отвір у качалці, -у поперечному - через отвори у фланці стакану.
Для забезпечення регулювання каналів поздовжньо-поперечного керування в конструкції колонки керування є чотири регульовані гвинти-упори.
7.3. ПРОВОДКА УПРАВЛІННЯ.
Проводка поздовжньо-поперечного управління призначена для передавання керівних переміщень від ручок циклічного кроку до комбінованих агрегатів управління, що визначають нахил тарілки автомата перекосу.
Проводка управління жорсткої конструкції, містить у собі:
- тяги -блоки роликів
- качалки -агрегат ПППУ і.УОШ
|
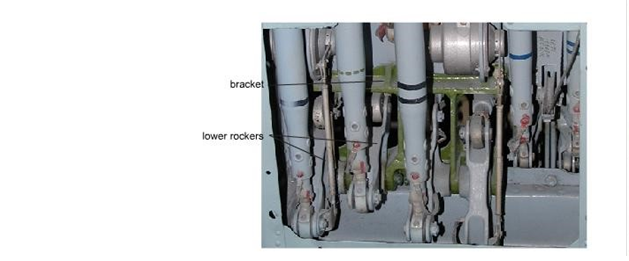
Рис.7.6. - Нижні кутові качалки/Lover rockers |
Рис.7.7. - Проводка управління на шп.№5Н/Control linkage on frame №5H |
 ПППУ – поздовжньо, поперечне, шляхове управління. УОШ – управління загальним кроком.
ПППУ – поздовжньо, поперечне, шляхове управління. УОШ – управління загальним кроком.
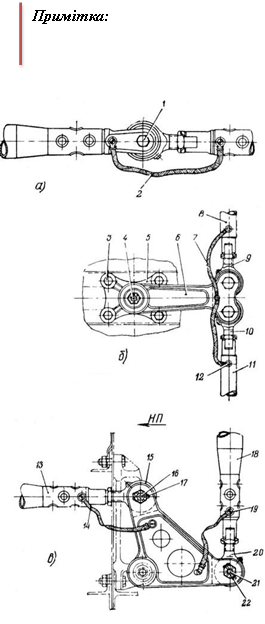
Рис.7.8. - Типові з'єднання тяг проводки управління.
а). Типове з'єднання тяг:
1. Болт;
2. Перемичка металізації;
б). З'єднання вертикальних тяг за допомогою підтримуючої гойдалки:
3, 4, Болти; 5. Кронштейн;
6. Підтримувальна гойдалка;
7. Перемичка металізації;
9, 10. Наконечники;
11. Тяга;
12. Гвинт;
в). З'єднання за допомогою кутової гойдалки: 13. Тяга;
14. Перемичка металізації;
15, 20. Наконечники;
16, 21. Болти;
17, 22. Шплінти;
18. Тяга;
19. Гвинт.
Управління вертольотом подвійне, тому дві ручки циліндричного кроку кінематично пов'язані між собою за допомогою тяг і гойдалок під підлогою кабіни екіпажу. Дві тяги (поздовжній і поперечний канали) складаються з двох ланок кожна. Ланки пов'язані між собою через підтримуючу качалку. Качалки лівої ручки циклічного кроку пов'язані тягами під підлогою кабіни екіпажу з нижніми кутовими качалками, встановленими на загальному кронштейні в нижній частині шпангоута № 5Н з боку центральної частини фюзеляжу.
Від нижніх кутових качалок тяги прокладені вертикально по стінці шпангоута № 5Н (Рис.7.7. ) і з'єднуються з верхніми кутовими гойдалками, встановленими на загальному кронштейні. Між нижніми і верхніми кутовими качалками тяги складаються з двох ланок і шарнірно пов'язані між собою проміжними качалками для створення необхідної жорсткості проводки управління на вертикальній ділянці.
Від верхніх кутових качалок (Рис.7.9.) тяги проходять з нижнього боку стельової панелі і з'єднуються з нижніми важелями агрегату ПППУ і УОШ.
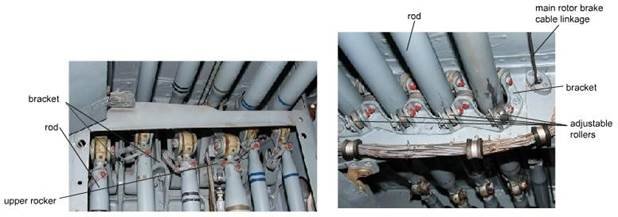
|
Рис.7.9. - Верхні кутові качалки/ Upper rockers |
Рис. 7.10. - Кронштейн з роликами/ Bracket with rollers |
Кожна горизонтальна тяга складається з трьох ланок, шарнірно з'єднаних між собою. Середні ланки тяг закріплені у двох роликових напрямних (Рис. 7.10), встановлених на шпангоутах № 4 і 6 центральної частини фюзеляжу.
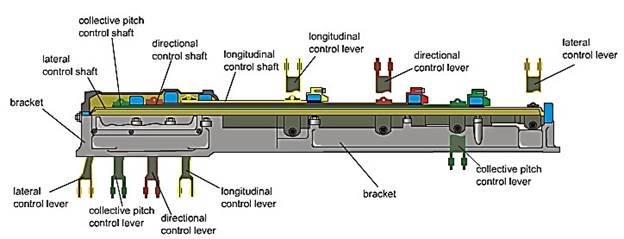
Рис.7.11. - Агрегат повздовжнього, поперечного, шляхового управління та управління загальним кроком
Верхні важелі агрегату ПППУ і УОШ з'єднуються за допомогою вертикальних тяг із вхідними качалками гідропідсилювачів КАУ-30Б (Рис. 7.12) відповідно поздовжнього і поперечного каналів управління.
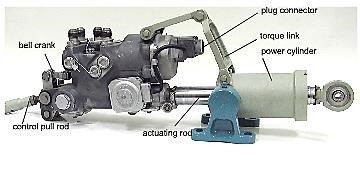
Рис. 7.12. Комбінований агрегат управління КАУ-30Б
Тяги призначені для передачі керуючих зусиль. Поперечні тяги, що з'єднують РЦШ між собою, а також тяги після гідропідсилювачів виконані з хромансилієвих, інші - з дюралюмінієвих труб. На кінцях труб закріплені сталеві стакани, в які вкручені вушкові або вільчасті наконечники. Наконечники служать для регулювання довжини тяг і з'єднують елементи проводки між собою. У склянках просвердлені радіальні отвори для контролю за величиною різьбової частини наконечника, угвинченого в склянку. Контрольні отвори повинні бути завжди перекриті різьбовою частиною наконечника. Наконечники фіксуються від провертання контргайками.
Качалки призначені для підтримання тяг з метою забезпечення необхідної жорсткості проводки управління, а також для зміни напряму в передаванні зусиль, що керують. Гойдалки виконані штампуванням із матеріалу АК6. Кронштейни для встановлення качалок виготовлені методом лиття з магнієвого сплаву МЛ5ПЧ.
З'єднання тяг і качалок між собою виконано на сферичних підшипниках, що мають для змащення прес-маслянки. Мастило проводиться ЦИАТИМ-201. Усі елементи проводки пов'язані металізацією.
Блоки роликів (Рис. 7.10) використовуються для забезпечення необхідної жорсткості середньої ланки горизонтальних тяг.
1. Нерегульовані ролики; 2. Регульований ролик; 3. Кронштейн; 4. Ексцентрикова вісь.
Конструктивно блок роликів складається з магнієвого литого магнієвого кронштейна, в якому на валиках встановлені три текстолітових ролика. Для регулювання зазору між тягою і роликами є ексцентрикова вісь, яка у відрегульованому положенні стопориться гвинтом. Встановлено на шпангоутах № 4 і 6 ЦЧФ.
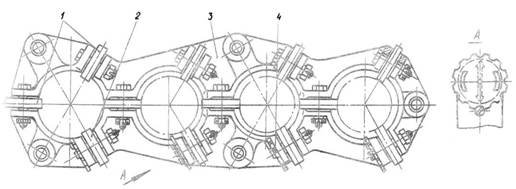
Агрегат поздовжнього, поперечного, шляхового управління і управління загальним кроком (Рис.7.11) призначений для забезпечення герметичного виведення проводки управління з вантажної кабіни вертольота в редукторний відсік. Він забезпечує також раціональне компоновку ліній системи управління. Складається з кронштейна, виготовленого зі сплаву МЛ5, і чотирьох валів, кожен з яких встановлений у кронштейні на двох шарикопідшипникових опорах, що забезпечують їхнє вільне обертання відносно один одного.
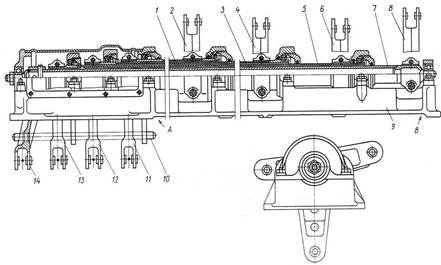
1. Вал поздовжнього управління; 9. Кронштейн;
2. Верхній важіль поздовжнього управління; 10. Штир для фіксації управління у
3. Вал шляхового управління; нейтральному положенні;
4. Верхній важіль шляхового керування; 11. Нижній важіль поздовжнього керування;
5. Вал управління загальним кроком; 12. Нижній важіль колійного керування;
6. Верхній важіль управління загальним 13. Нижній важіль керування загальним кроком; кроком;
7. Вал поперечного управління; 14. Нижній важіль поперечного керування.
8. Верхній важіль поперечного управління;
Кожен вал являє собою трубу із закріпленими двома важелями. Порожнини опор набиті мастилом і закриті кришками з сальниками для унеможливлення потрапляння до підшипників пилу і бруду. Підшипники опор внутрішнього вала - закритого типу. Кронштейн своїм нижнім фланцем кріпиться болтами до стельової панелі біля шпангоута № 10 у редукторному відсіку. Нижні важелі виходять через люк стельової панелі у вантажну кабіну. На нижніх приливах кронштейна і на важелях є отвори під штир фіксації проводки керування в середньому положенні.
7.4. ПРИЗНАЧЕННЯ МЕХАНІЗМІВ ЗАВАНТАЖЕННЯ ЛІНІЙ УПРАВЛІННЯ, ЕЛЕКТРОМАГНІТНИХ ГАЛЬМ ЕМТ-2М ТА ГІДРОУПОРУ.
Гідроупор поздовжнього керування.
В умовах руління вертольота, і особливо на пробігу, можливі випадки, коли під час різкого взяття ручки циклічного кроку на себе конус несучого гвинта відхиляється на граничний кут, унаслідок чого виникає небезпека удару лопатей несучого гвинта об хвостову балку.
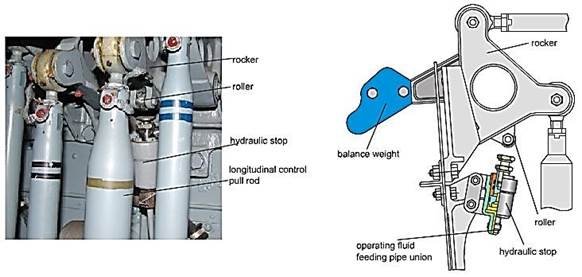
Рис.7.13. - Гідроупор в повздовжньому напрямку/Hydraulic stop in longitudinal control
Гідроупор поздовжнього керування призначено для автоматичного обмеження на землі кута нахилу тарілки автомата перекосу назад до 2º ±12´ , щоб уникнути удару лопатей несучого гвинта об хвостову балку. Гідравлічний упор встановлений на верхньому кронштейні, розташованому на стінці шпангоута № 5Н, проти верхньої кутової гойдалки поздовжнього керування. На нижній частині качалки є пружина, в якій на осі встановлено ролик. Коли вертоліт перебуває на землі, за працюючих двигунів у циліндр гідроупору здійснюється підведення робочої рідини через електромагнітний кран ГА-192 гідравлічної системи. Шток циліндра переміщається вгору, ролик упирається в упор і перешкоджає подальшому відхиленню ручки циліндричного кроку назад. У разі відхилення РЦШ назад і нахилу тарілки автомата перекосу на кут понад 2º±12´ ручка різко навантажується додатковим зусиллям 12±3 кгс. Вимкнення гідроупору під час зльоту здійснюється автоматично кінцевими вимикачами, встановленими на шліц-шарнірах головних стійок шасі: електромагнітний клапан ГА-192 з'єднує порожнину гідроупору з магістраллю зливу гідросистеми, і льотчик має повний діапазон відхилень ручки циклічного кроку без різкої зміни на ній зусиль.
Пружинні механізми завантаження.
Усі гідропідсилювачі включені в проводку управління за незворотною схемою, тому зусилля з органів управління на командні важелі не передаються. Для створення позитивного градієнта зусилля на важелях у каналах поздовжнього, поперечного і шляхового управлінь встановлено керовані механізми завантаження з електромагнітними гальмами ЭМТ-2М.
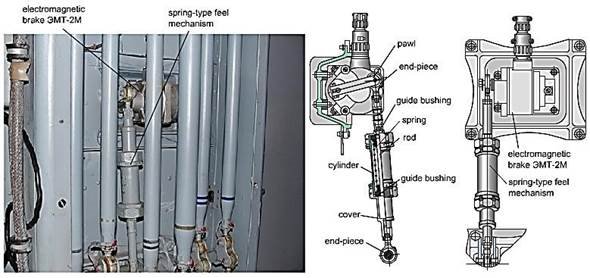
Рис. 7.14. - Встановлення пружинного механізму завантаження з електромагнітним гальмом/ Arrangement of spring-type feel mechanism with electromagnetic brake ЭМТ-2М
Пружинні механізми завантаження призначені для створення зусиль на командних важелях управління, а також для зняття цих зусиль за допомогою електромагнітних гальм ЭМТ-2М на сталих режимах польоту. Завантажувальні механізми завантаження встановлено на стінці шпангоута № 5Н (Рис.7.15) з боку центральної частини фюзеляжу. Для підходу до них є знімна панель.
Конструктивно пружинні механізми поздовжнього і поперечного каналу аналогічні й містять у собі:
- циліндр;
- кришку;
- шток;
- різьбові наконечники з підшипниками; - пружину.
Пружина встановлена всередині циліндра і має попередній натяг 9,1 кгс, унаслідок чого знімається відчуття тертя в системі управління і поліпшується центрованість ручки. Під час переміщення важеля управління пружини завантажувальних механізмів стискаються і формують на них зусилля. Що більше потрібно відхилити важелі, то більше зусилля має докласти льотчик.
За необхідності льотчик може зняти зусилля з ручки керування і педалей натисканням кнопки "ТРИММЕР", розташованої на рукоятці ручки циклічного кроку. При цьому відбувається розгальмовування всіх трьох електромагнітних гальм ЕМТ-2М (поздовжній, поперечний, колійний канали управління); зусилля з ручок управління і педалей знімаються миттєво.
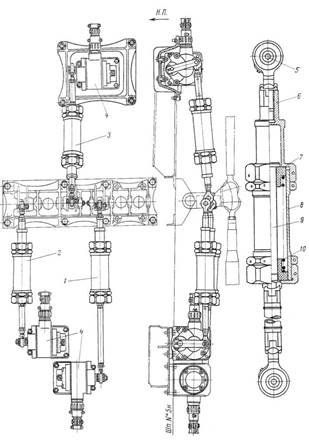
Рис.7.15. - Схема включення в лінію управління:
1. Пружинний механізм завантаження поперечного управління;
2. Пружинний механізм завантаження колійного управління;
3. Пружинний механізм завантаження поздовжнього управління;
4. Електромагнітні гальма ЕМТ-2М;
5. Вушковий наконечник;
6. Кришка;
7. Напрямна втулка;
8. Циліндр;
9. Шток;
10. Пружина.
Максимальні зусилля наприкінці ходу важелів управління не повинні перевищувати:
|
- у поздовжньому каналі |
8,6 кгс; |
|
- у поперечному каналі |
6,0 кгс; |
|
- у шляховому каналі
|
13,0 кгс. |
Електромагнітне гальмо ЭМТ-2М призначене для зняття навантажень із важелів керування на сталих режимах польоту.
Основні технічні дані:
Напруга живлення 27В,
Споживаний струм 3,2А,
Маса 2 кг.
Передавальне відношення редуктора від вивідного вала до вала відцентрового гальма становить 1:77,735.
Гальмо ЕМТ-2М включає в свою конструкцію редуктор, електромагнітну муфту і відцентрове гальмо.
У корпусі електромагнітної муфти розташовані котушка, натискний диск, три гальмівні диски і пружина.
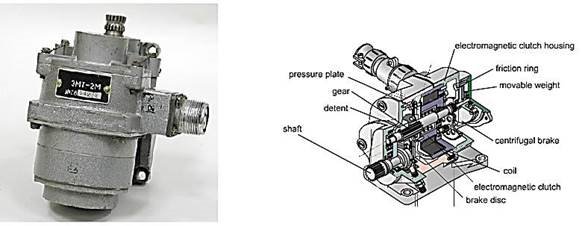
Рис.7.16. - Електромагнітні гальма ЭМТ-2М/Electromagnetic brake ЭМТ-2М
Редуктор складається із зубчастого сектора, зубчастого колеса, на валу якого закріплено зубчасте колесо блоку. Велике зубчасте колесо блоку перебуває в зачепленні і приводить в обертання зубчасте колесо відцентрового гальма. Відцентрове гальмо складається з вала, на якому штифтом кріпиться склянка з рухомими вантажами. Рухомі вантажі під час обертання валів зі склянкою притискаються до фрикційного кільця, яке нерухомо закріплене в корпусі і закрите кришкою.
Робота ЭМТ-2М.
За знеструмленої електромагнітної муфти її гальмівний диск під дією пружини притиснутий до гальмівного диска, закріпленого на корпусі редуктора. Це забезпечує жорстку фіксацію вивідного вала гальма і встановленого на ньому повідця. Для зняття зусиль з ручки управління або педалей льотчик натискає кнопку управління пружинними механізмами завантаження. Під час подавання живлення до електромагнітного гальма його електромагнітна муфта притягує диск до корпусу, стискає пружину і звільняє поводок, який під дією з боку пружинного механізму повертається і займає нейтральне положення, знімаючи в такий спосіб навантаження з органів керування. Під час повороту повідця гальма разом із вивідним валом повертається зубчастий сектор, який приводить в обертання зубчасте колесо. Далі через зубчасті пари коліс редуктора приводиться в обертання стакан із рухомими вантажами відцентрового гальма, які притискаються до нерухомого фрикційного кільця та уповільнюють обертання вивідного вала. Під час вимкнення живлення електромагнітної муфти один гальмівний диск затискається пружиною між двома сусідніми дисками, зубчасте колесо стопориться і вивідний вал зупиняється. Поворот вивідного вала обмежується упорами.
8. Закріплення знань студентів проводиться в тестовій формі. 20 хв
Закріплення матеріалу лекції проводиться у вигляді тестування та додаткового усного опитування.
За допомогою інтерактивної платформи www.classtime.com, здобувачі освіти в режимі реального часу виконують тестові завдання за теоретичним матеріалом лекції, а викладач на моніторі слідкує за виконанням завдань та відповідями, що відображаються в спеціальній таблиці розпочатої сесії за закріпленням знань. При цьому правильна відповідь відображається зеленим кольором, а неправильна - червоним. На 1 тестове питання відводиться 45 секунд.
Код та QR-код на сесію classtime з тестовими завданнями:
Активне посилання на сесію classtime з тестовими завданнями:
https://www.classtime.com/code/2D7N32
Додаток А. Правильні відповіді до тестових завдань.
|
Номер завдання |
Правильна відповідь |
Номер завдання |
Правильна відповідь |
|
1 |
відповідь 4 |
10 |
відповідь 3 |
|
2 |
відповідь 2 |
11 |
відповідь 2 |
|
3 |
відповідь 1-3 |
12 |
відповідь 1 |
|
4 |
відповідь 2 |
13 |
всі відповіді |
|
5 |
відповідь 1 |
14 |
відповідь 2 |
|
6 |
відповідь 3 |
15 |
відповідь 4 |
|
7 |
відповідь 4 |
16 |
відповідь 1 |
|
8 |
відповідь 3 |
17 |
відповідь 4 |
|
9 |
відповідь 1 |
--- |
|
9. Коментар роботи студентів 2хв.
Викладач вказує на помилки і неточності при закріпленні матеріалу лекції.
10. Підсумок заняття 2хв.
Викладач відзначає роботу студентів на лекції, називає прізвища тих, хто проявив особливу сумлінність і зацікавленість.
11. Домашнє завдання 2хв.
1. Підготуватися до практичного заняття з теми "Поздовжньо-поперечна лінія управління вертольотом" та розробити алгоритм усунення дефекту за вказаною несправністю.
12. Питання самостійного вивчення.
Тяги жорстких систем управління: класифікація, маркування, контрольні отвори.
СПИСОК РЕКОМЕНДОВАНИХ ДЖЕРЕЛ
1. Данілов В.А. Вертоліт Мі-8. Пристрій і технічне обслуговування. Транспорт 1988р.
2. Данілов В.А. та ін. Вертоліт Мі-8МТВ. Транспорт 1995р.
3. Данілов В.А. та ін. Вертоліт Мі-8. Транспорт 1979р.
4. Вертоліт Мі-8. Технічний опис. Книга 1. Льотно-технічні характеристики. Машинобудування 1970р.
5. Вертоліт Мі-8. Технічний опис. Книга 2. Конструкція. Машинобудування 1970р.
6. Вертоліт Мі-8. Інструкція з технічної експлуатації. Книга 1. Планер і силова установка. Воєніздат 1980р.
7. Вертоліт Мі-8. Технологія виконання регламентних робіт і підготовки до польотів. До єдиного регламенту технічної експлуатації вертольота Мі-8. Частина 1, розділ 1. Підготовка до польотів. Машинобудування 1975р.
8. Вертоліт Мі-8. Технологія виконання регламентних робіт і підготовки до польотів. До єдиного регламенту технічної експлуатації вертольота Мі-8. Частина 1, розділ 2. Регламентні роботи. Машинобудування 1975р.
9. Авіаційний турбогвинтовий двигун ТВ2-117А і редуктор ВР-8А. Технічний опис. Машинобудування 1977р.
10. Основи конструкції вертольотів. Під редакцією О.М. Глаголєва. Воєніздат
1972 р.
ВИСНОВОК
У даній методичній розробці знайшло відображення бачення викладачем методики проведення лекції з використанням спеціалізованої наочності засобами google для дистанційного навчання (сервіс googlemeet з інтеграцією GoogleClassroom, платформа Classtime), що дає змогу в типовій реальності вивчати як складну функціональну систему в цілому так і розглядати окремі її ланки та елементи. За допомогою детальної спеціалізованої наочності, що відображає складність функціональних процесів, маємо змогу зберегти принцип "від простого до складного". Використовуючи вказаний програмний елемент, надається можливість у яскравому та динамічному зображенні пояснювати новий матеріал, що відображається на більш повному сприйнятті нового матеріалу студентами.
Такий вид лекції сприяє зближенню теорії з практикою, дозволяє студентам доступно і глибоко засвоювати матеріал теми, надихає до самостійного вивчення матеріалу в інноваційному та інтерактивному його поданні.
Використання мультимедійного комплексу дає змогу наочно і в динаміці показати студентам нову техніку, технологію і прийоми роботи з нею без витрат часу на відвідування підприємств, а також розглядати будову агрегатів, що закриті корпусом. Наочність, що використовувалась, спрямована на систематизацію і закріплення навчального матеріалу, на загострення уваги студентів на його ключових моментах або для швидкої і твердої зміни думки про неправильно засвоєний матеріал.
У процесі опитування студентів, використання наочних методів навчання спрямоване на формування їхнього вміння використовувати дидактичний матеріал для доведення логічності своїх тверджень, що сприяє формуванню безпомилковості дій.
РЕЦЕНЗІЯ
на методичну розробку заняття
викладача Рєзніка Андрія Володимировича на тему „Система управління вертольотом Мі-8П/Т/МТВ”
Тема методичної розробки „Система управління вертольотом Мі-8П/Т/МТВ” є достатньо актуальною, тому що основна діяльність майбутніх фахових молодших бакалаврів з технічного обслуговування ПС і двигунів спрямована на організацію та забезпечення своєчасної і якісної підготовки авіаційної техніки для забезпечення регулярності польотів та підтримання її норм льотної придатності .
Тема заняття відповідає діючій навчальній програмі.
Зміст лекції відповідає сучасному рівню розвитку авіаційної техніки. Питання викладені чітко, логічно, послідовно, у формі, доступній для сприйняття студентами. Тема лекції висвітлена повністю.
Особливо цінним в методичній розробці є те, що для викладання нового матеріалу викладач застосовує інтерактивні цифрові інструменти, платформи, додатки, які повністю задовольняють потреби у дистанційному навчання, що дає можливість демонструвати різні види наочностей. Це дозволяє максимально наблизити здобувачів до реальних умов розташування, будови, роботи та місць проведення технічного обслуговування компонентів системи управління вертольотом, формуванню у них професійних компетенцій.
Зв’язок теорії з практикою висвітлюється під час активізації розумової діяльності здобувачів, демонстрації слайдів, відео фрагментів та під час проведення закріплення навчального матеріалу за допомогою цифрових онлайн - сервісів.
Підвищення професійної компетентності реалізуються через використання назви компонентів системи управління вертольотом за допомогою англійської мови під час викладення навчального матеріалу.
Розробка викладена стилістично грамотно, доцільно використовуються технічні терміни, Державні стандарти.
Методична розробка має план, хід заняття, посилання на літературу її оформлення відповідає вимогам.
Висновок:
Методична розробка викладача Рєзніка А.В. на тему „ Система управління вертольотом Мі-8П/Т/МТВ ” має практичну цінність для викладачів і може бути рекомендована для використання викладачами циклових комісій зі спеціальності 272 «Авіаційний транспорт».
Завідувач відділення Відокремленого структурного підрозділу «Слов'янський фаховий коледжу Національного авіаційного університету»,
![]() викладач - методист, спеціаліст вищої
викладач - методист, спеціаліст вищої
кваліфікаційної категорії О. Суліман
РЕЦЕНЗІЯ
на методичну розробку заняття викладача Рєзніка Андрія Володимировича на тему "Система управління вертольотом Ми-8П/Т/МТВ" спеціальність 272 «Авіаційний транспорт»
Освітньо-професійна програма: Технічне обслуговування повітряних суден і двигунів
Тема методичної розробки "Система управління вертольотом Ми-8П/Т/МТВ" є досить актуальною, бо основна діяльність майбутніх спеціалістів з технічного обслуговування повітряних суден спрямована на організацію та забезпечення своєчасної та якісної підготовки авіаційної техніки до польоту.
Тема заняття відповідає чинній навчальній робочій програмі.
Зміст лекції відповідає сучасному рівню підготовки авіаційних фахівців. Питання викладено чітко, логічно, послідовно, у формі, доступній для сприйняття студентами. Тема лекції висвітлена повністю.
Особливо цінним у методичній розробці є те, що для викладання нового матеріалу викладач застосовує технічні засоби навчання та різні види спеціалізованої наочності, що дає змогу максимально наблизити студентів до реальних умов роботи в авіаційній галузі та формуванню в них спеціальних компетентностей за фахом.
Зв'язок теорії з практикою висвітлюється під час активізації розумової діяльності студентів.
Розробка викладена стилістично грамотно, доцільно використовуються науково-технічні терміни, Державні стандарти, технічна документація за типом.
Методична розробка має план, хід заняття, посилання на літературу, її оформлення відповідає вимогам.
Висновок:
Методична розробка викладача Рєзнік А.В. на тему "Система управління вертольотом Ми-8П/Т/МТВ" має практичну цінність для викладачів і може бути рекомендована для використання викладачами циклових комісій в галузі 27 Транспорт.
 Професор навчального відділу Кременчуцького льотного коледжу Харківського національного університету внутрішніх справ, викладач циклової комісії аеронавігації, кандидат технічних наук, старший науковий співробітник, спеціаліст вищої категорії,
Професор навчального відділу Кременчуцького льотного коледжу Харківського національного університету внутрішніх справ, викладач циклової комісії аеронавігації, кандидат технічних наук, старший науковий співробітник, спеціаліст вищої категорії,
викладач-методист В. Тягній

про публікацію авторської розробки
Додати розробку