Творчий проєкт Радіокерований автомобіль «Автопомічник»
Творчий проєкт
Радіокерований автомобіль «Автопомічник»
Прізвище, ім’я автора: Жамліханов Євген
Керівник: Юричко Віктор Михайлович
Заклад освіти, клас: Комунальний заклад «Луцька загальноосвітня школа І-ІІІ ступенів № 13 Луцької міської ради», 7- А клас
На сьогоднішній день сучасні технології керують багатьма сферами діяльності, особливо, що ні для кого це не новинка, та ми вже привикли до цього. Це відображається у багатьох галузях. Але з недавнього часу активно розвивається робото-індустрія, що значно спрощує людське життя, а в деяких моментах навіть рятує.
З еволюцією техніки появляються мобільні роботи та робото-системи оснащеними новітніми розробками, та новими способами зв’язку. Вони розповсюджуються в різних галузях: військової, промислової, соціальної, медичної, побутової та ін.
Актуальність роботи. В наш час я бачу у фільмах військових роботів, роботів-охоронців та роботів-інспекторів. Але, поки що навіть не кожна п’ята людина має можливість власного домашнього або промислового охоронця. Таку статистику я порівняв з роботами-пилососами, хоча це й не новизна, але їх розповсюдженість бажає кращого. Головною метою розвитку роботів-інспекторів є висока точність розпізнання небезпеки, точний план дії та швидке реагування.
Мета роботи: Розробити власний радіокерований автомобіль, використовуючи блютуз модуль.
Практична цінність.
По-перше, за допомогою теоретичної частини людина отримає багато цікавої інформації, щодо сучасного світу.
По-друге, роботінспектор – це добрий аналог класичним сигналізаціям, але з можливістю радіокерування, дистанційного керування, більш швидкого реагування та ефективність прийняття правильного рішення машиною.
Сучасна робототехніка будується на знаннях з області програмування, механіки, механотроніки, електротехніки, електроніки та автоматичного управління. Для такого, щоб освоїти робототехніку на базисному рівні достатньо шкільних знань отриманих на уроках математики, фізики та інформатики. Але також в подальшому нам будуть потрібні знання з проектування, щоб створювати зручні продукти.
Тіло роботу – фізичні його складові вивчає машинобудування.
Електротехніка та електроніка або, як кажуть, «нервова система» займаються електричними системами самого робота, тобто усередині нього, вбудованими системами, низькорівневим програмуванням і теорією управління. Якнайчастіше це автоматизація, яка будується навколо контролю та управлінню робота.
Цей проєкт дуже весело виконувати! Тут є багато маленьких деталей (які можуть привести до багатьох відхилень), хіба це не весело? Мені по-справжньому подобається цей проєкт, тому що він охоплює широке розмаїття концептів як в програмному забезпеченні (програмування на Python), так і в комп'ютерному обладнанні через Raspberry Pi, та, безумовно, пов'язує їх.
Тепер розглянемо будову радіокерованого автомобіля «Автопомічник», яку я вибрав для проєктної роботи.
Основні компоненти пристрою
- Плата з відкритим кодом Arduino UNO
- Драйвер для моторчиків L293D
- Акумулятор Samsung 18650
- Блютуз модуль HC-05
- Моторчик 5 В
- Послідовний контейнер для акумуляторів
- Картонна основа

Для програмування використали платформу Arduino.
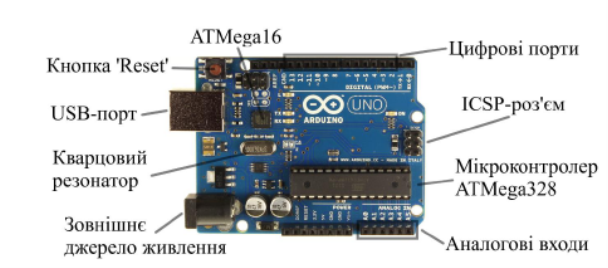
Arduino – це платформа на базі мікроконтролерів сімейства Atmega, американської фірми Atmel. Завдяки простоті конструкції і досить легкому навчання написання коду на ній, вона є досить популярною і дуже корисною річчю для початківця програміста або радіоаматора. Однак, її можливості, аж ніяк, не обмежуються застосуванням лише в інтересах навчання. У надрах цієї плати таїться дуже високий потенціал, який втілюється в найрізноманітніші і круті проекти: від звичайних роботів і сигналізації в автомобіль, до повноцінної системи «Розумний будинок», симуляторів голосу і музичних інструментів. Говорячи простою мовою, Ардуіно – це електронна плата, в яку можна увіткнути безліч різних пристроїв і змусити їх працювати разом за допомогою програми, написаної на мові Arduinoв спеціальному середовищі програмування. Найчастіше плата виглядає ось так:
У плату можна встромляти дроти і підключати безліч різних елементів. Найчастіше, для з'єднання використовується макетна плата для монтажу без пайки. Можна додавати світлодіоди, датчики, кнопки, двигуни, модулі зв'язку, реле і створювати сотні варіантів цікавих проектів розумних пристроїв. Плата Ардуіно – це розумна розетка, яка буде включати і вимикати всі приєднане в залежності від того, як її запрограмували.
Вся робота над моїм проєктом розбивається на наступні етапи:
1. Придумую ідею і проєктую.
Складаю електричне схему. Тут мені стала в нагоді макетна плата, яка спрощує монтаж елементів. Також знадобилися навички роботи з електронними приладами і вміння користуватися мультиметром.
2. Підключаю плату Arduino до комп'ютера через USB.
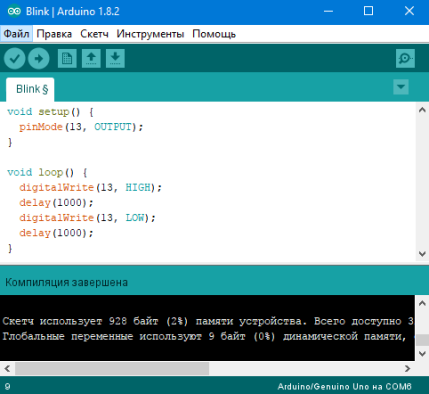
Пишу програму і записую її в плату буквально натисканням однієї кнопки на екрані в спеціальному середовищі програмування Arduino.
Від'єдную від комп'ютера. Тепер пристрій буде працювати автономно – при включенні харчування воно буде управлятися тією програмою, яку я в нього записав.
3. Програма і середовище програмування виглядають ось так:
Я використав у своєму проекті Arduino Uno.
Arduino Uno – це пристрій на основі мікроконтролера ATmega328 (datasheet). У його склад входить все необхідне для зручної роботи з мікро контролером: 14 цифрових входів / виходів (з них 6 можуть використовуватися в якості ШІМ-виходів), 6 аналогових входів, кварцовий резонатор на 16 МГц, роз'єм USB, роз'єм живлення, роз'єм для внутрисхемного програмування (ICSP) і кнопка скидання. Для початку роботи з пристроєм досить просто подати живлення від AC / DC-адаптера або батарейки, або підключити його до комп'ютера за допомогою USB-кабелю.
Також були використані слідуючі компоненти:
- Мікросхема драйвер двигунів L293D

L293D містить відразу два драйвери для керування електродвигунами невеликої потужності (чотири незалежні канали, об'єднані в дві пари). Має дві пари входів для сигналів, що управляють, і дві пари виходів для підключення електромоторів. Крім того, L293D має два входи для включення кожного з драйверів. Ці входи використовуються для керування швидкістю обертання електромоторів за допомогою широтно модульованого сигналу (ШІМ).
L293D забезпечує поділ електроживлення для мікросхеми та для керованих нею двигунів, що дозволяє підключити електродвигуни з більшою напругою живлення, ніж у мікросхеми. Поділ електроживлення мікросхем і електродвигунів може бути також необхідний зменшення перешкод, викликаних кидками напруги, пов'язаними з роботою моторів.
Принцип роботи кожного з драйверів, що входять до складу мікросхеми, ідентичний, тому розглянемо принцип одного з них.
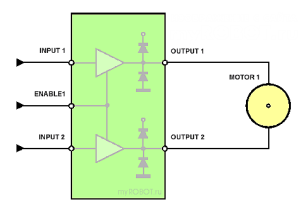
Наразі розглянемо призначення висновків мікросхеми L293D.
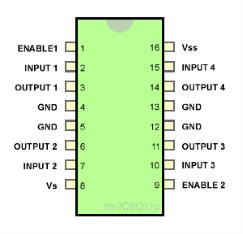
- Моторчик 5 В

- Блютуз модуль HC-05

Модуль BlueTooth HC-05 призначений для організації двостороннього зв'язку за протоколом BlueTooth. BlueTooth є найпопулярнішим типом зв'язку між пристроями на коротких дистанціях. Особливістю передачі даних по BlueTooth є стійкість до широкосмугових перешкод. Цей модуль можна використовувати для керування роботами, освітленням та іншими пристроями на відстані.
BlueTooth HC-05 має можливість працювати у веденому та провідному режимах. Завдяки цим двом режимам модуль може самостійно виявити та налагодити зв'язок із пристроєм. Модуль BlueTooth HC-05 спроектований на основі мікросхеми CSR BC417, що підтримує зв'язок BlueTooth версії 2.0. Швидкість передачі модуля становить до 3 Мбіт/c.
Плата модуля має 6 висновків:
EN: вимкнення модуля. При подачі логічної одиниці на цей висновок модуль вимикається
VCC: живлення модуля напругою 3,3 В
GND: "земля"
TXD: висновок, який приймає дані (UART)
RXD: контакт для надсилання даних (UART)
STATE: індикатор стану. У процесі встановлення зв'язку модуля світлодіод блимає, а при встановленому зв'язку індикатор світиться
Керувати модулем можна за допомогою команд AT. АТ-команди – це набір інструкцій, при отриманні яких модуль виконує певні дії. Режим AT-команд приєднується до мікроконтролерного пристрою за допомогою виведення мікросхеми KEY. На платі немає окремого виведення KEY, тому підключити його можна за допомогою дроту, підпаявши його до ніжки мікросхеми, яка відповідає за цей висновок.
Подавати на модуль можна як від зовнішнього джерела живлення, так і від платформи Arduino. Напруга живлення модуля становить 3,3 В.
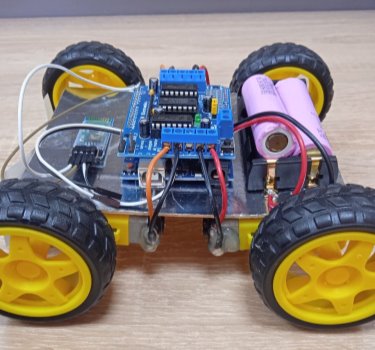
Зовнішний вигляд

Дану роботу дуже весело виконувати! Тут є багато маленьких деталей (які можуть привести до багатьох відхилень), хіба це не весело? Мені по-справжньому подобається цей проєкт, тому що він охоплює широке розмаїття концептів як в програмному забезпеченні (програмування на Python), так і в комп'ютерному обладнанні через Raspberry Pi, та, безумовно, пов'язує їх.
Цей проєкт також вельми універсальний. Ці машинки можна використовувати для інших задач, окрім групової робототехніки (хоча вони налаштовані, щоб працювати добре і в таких проєктах теж). Він точно має немалий поріг входження, що багато чому вас навчить! На додаток, ці навички також будуть корисними для схожих проєктів.
1

про публікацію авторської розробки
Додати розробку