Знаходження рівнодійної системи збіжних сил геометричним і аналітичним методами.


Знаходження рівнодійної системи збіжних сил геометричним і аналітичним методами.
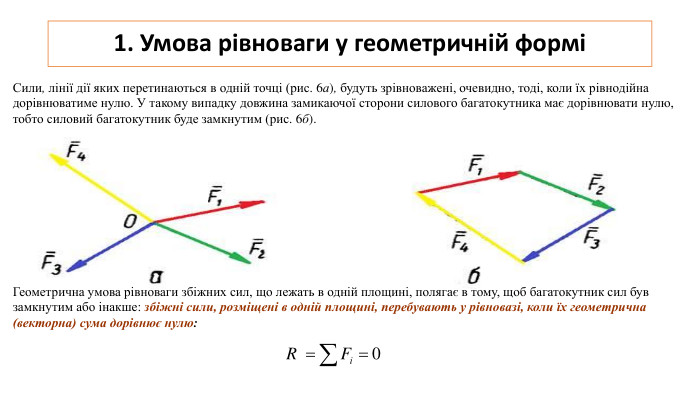
1. Умова рівноваги у геометричній форміСили, лінії дії яких перетинаються в одній точці (рис. 6а), будуть зрівноважені, очевидно, тоді, коли їх рівнодійна дорівнюватиме нулю. У такому випадку довжина замикаючої сторони силового багатокутника має дорівнювати нулю, тобто силовий багатокутник буде замкнутим (рис. 6б). Геометрична умова рівноваги збіжних сил, що лежать в одній площині, полягає в тому, щоб багатокутник сил був замкнутим або інакше: збіжні сили, розміщені в одній площині, перебувають у рівновазі, коли їх геометрична (векторна) сума дорівнює нулю:
2. Умова рівноваги в аналітичній форміАналітично величину рівнодійної визначають за формулою: Але коли , то нулю дорівнює і вираз під коренем, а це можливо тоді, коли кожна складова під коренем дорівнює нулю, тобто: Ці рівняння називають рівняннями рівноваги плоскої системи збіжних сил. Отже, для рівноваги плоскої системи збіжних сил необхідно і достатньо, щоб алгебраїчні суми проекцій всіх сил на кожну з двох координатних осей, що лежать у площині дії сил, дорівнювали нулю. Ми знаємо, що збіжна система сил може бути замінена однією силою, рівнодійною. Рівнодійну такої системи сил можна знаходити геометричним способом, за правилом силового многокутника, і аналітично, на підставі формул модуля (R) та напрямних косинусів рівнодійної
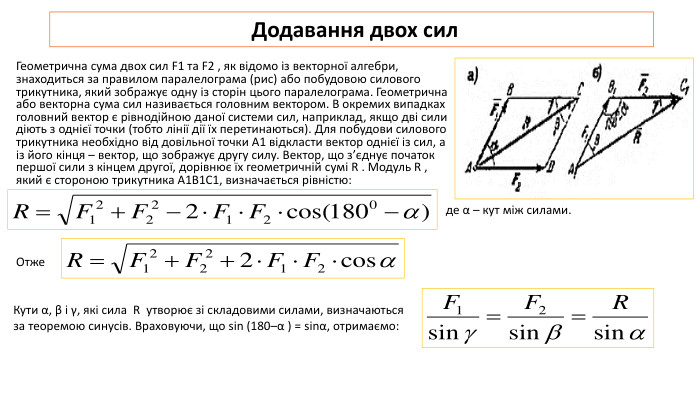
Додавання двох сил Геометрична сума двох сил F1 та F2 , як відомо із векторної алгебри, знаходиться за правилом паралелограма (рис) або побудовою силового трикутника, який зображує одну із сторін цього паралелограма. Геометрична або векторна сума сил називається головним вектором. В окремих випадках головний вектор є рівнодійною даної системи сил, наприклад, якщо дві сили діють з однієї точки (тобто лінії дії їх перетинаються). Для побудови силового трикутника необхідно від довільної точки А1 відкласти вектор однієї із сил, а із його кінця – вектор, що зображує другу силу. Вектор, що з’єднує початок першої сили з кінцем другої, дорівнює їх геометричній сумі R . Модуль R , який є стороною трикутника А1 В1 С1, визначається рівністю:де α – кут між силами. Отже Кути α, β і γ, які сила R утворює зі складовими силами, визначаються за теоремою синусів. Враховуючи, що sin (180–α ) = sinα, отримаємо:
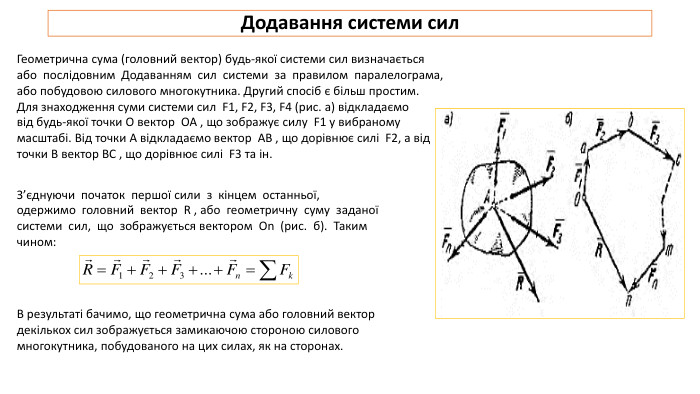
Додавання системи сил. Геометрична сума (головний вектор) будь-якої системи сил визначається або послідовним Додаванням сил системи за правилом паралелограма, або побудовою силового многокутника. Другий спосіб є більш простим. Для знаходження суми системи сил F1, F2, F3, F4 (рис. а) відкладаємо від будь-якої точки О вектор OA , що зображує силу F1 у вибраному масштабі. Від точки A відкладаємо вектор AB , що дорівнює силі F2, а від точки B вектор BC , що дорівнює силі F3 та ін. З’єднуючи початок першої сили з кінцем останньої, одержимо головний вектор R , або геометричну суму заданої системи сил, що зображується вектором On (рис. б). Таким чином: В результаті бачимо, що геометрична сума або головний вектор декількох сил зображується замикаючою стороною силового многокутника, побудованого на цих силах, як на сторонах.
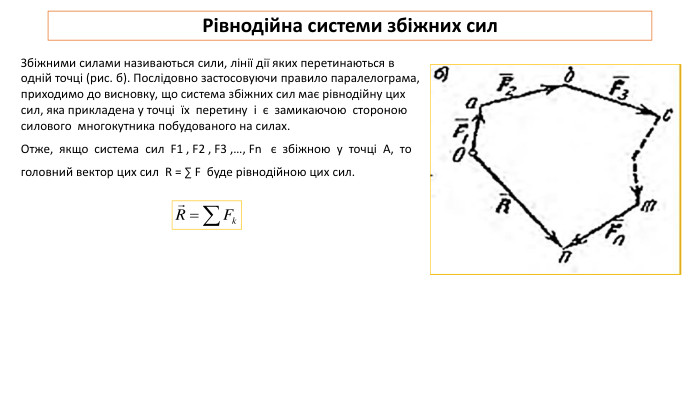
Рівнодійна системи збіжних сил. Збіжними силами називаються сили, лінії дії яких перетинаються в одній точці (рис. б). Послідовно застосовуючи правило паралелограма, приходимо до висновку, що система збіжних сил має рівнодійну цих сил, яка прикладена у точці їх перетину і є замикаючою стороною силового многокутника побудованого на силах. Отже, якщо система сил F1 , F2 , F3 ,…, Fn є збіжною у точці А, то головний вектор цих сил R = ∑ F буде рівнодійною цих сил.
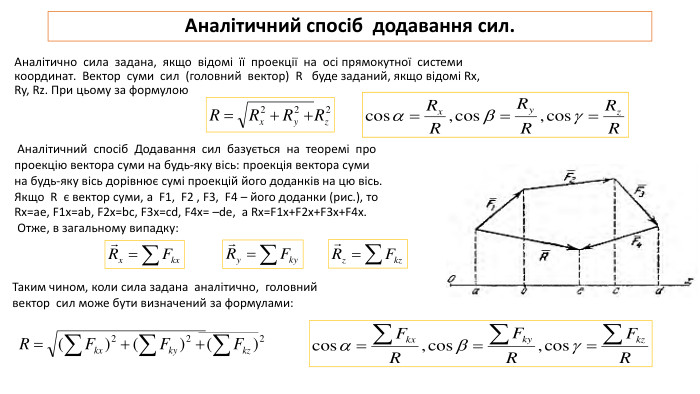
Аналітичний спосіб додавання сил. Аналітично сила задана, якщо відомі її проекції на осі прямокутної системи координат. Вектор суми сил (головний вектор) R буде заданий, якщо відомі Rx, Ry, Rz. При цьому за формулою Аналітичний спосіб Додавання сил базується на теоремі про проекцію вектора суми на будь-яку вісь: проекція вектора суми на будь-яку вісь дорівнює сумі проекцій його доданків на цю вісь. Якщо R є вектор суми, а F1, F2 , F3, F4 – його доданки (рис.), то Rx=ae, F1x=ab, F2x=bc, F3x=cd, F4x= –de, а Rx=F1x+F2x+F3x+F4x. Отже, в загальному випадку: Таким чином, коли сила задана аналітично, головний вектор сил може бути визначений за формулами:

про публікацію авторської розробки
Додати розробку