Інтеграція технологій LEGO MINDSTORMS Education EV3 в навчальний процес
Сьогодні розвиток STEM – один з основних трендів в світовій освіті. В Україні Міністерство освіти і науки у рамках реформування системи шкільної освіти розвиває напрямок співпраці з LEGO для використання новітніх методик навчання математики та інших 8 природничих дисциплін через робототехніку. Наголошується, що робототехніка – напрям, що потребує об'єднання знань з математики, фізики, інформатики, і в його межах діти мають можливість засвоювати знання через діяльність, творчість, що стимулює інтерес і розвиває любов до предметів.
Як результат переходу до нової цифрової епохи, в даний момент в Україні спостерігається ефективне впровадження в роботу установ освіти сучасного цифрового навчального обладнання і цифрових освітніх ресурсів нового покоління. В останнє десятиліття в сфері освіти значно збільшився інтерес до освітньої робототехніки.
Унікальність цієї освітньої технології полягає в міждисциплінарних заняттях, що засновані на активному навчанні, та інтегрують у собі науку, технологію, інженерну справу, математику. Робототехніка представляє учням технології XXI століття величезні можливості, сприяє розвитку їх комунікативних здібностей, просторової уяви, розвиває навички взаємодії, самостійності при прийнятті рішень, розкриває творчий інтелектуальний потенціал.
Залучення школярів до досліджень у галузі робототехніки, обміну технічною інформацією і початковими інженерними знаннями, розвитку нових науково-технічних ідей дозволяє створити необхідні умови для високої якості освіти, за рахунок використання в освітньому процесі нових педагогічних підходів і застосування нових інформаційних технологій.
Посібник містить теоретичний матеріал та розробки завдань для уроків з інформатики, математики, фізики, проведення занять в гуртку робототехніки та моделювання, а також міждисциплінарних занять природничо-математичного циклу.
АНОТАЦІЯ
Сьогодні розвиток STEAM – один з основних трендів в світовій освіті. В Україні Міністерство освіти і науки у рамках реформування системи шкільної освіти розвиває напрямок співпраці з LEGO для використання новітніх методик навчання математики та інших 8 природничих дисциплін через робототехніку. Наголошується, що робототехніка – напрям, що потребує об’єднання знань з математики, фізики, інформатики, і в його межах діти мають можливість засвоювати знання через діяльність, творчість, що стимулює інтерес і розвиває любов до предметів.
Як результат переходу до нової цифрової епохи, в даний момент в Україні спостерігається ефективне впровадження в роботу установ освіти сучасного цифрового навчального обладнання і цифрових освітніх ресурсів нового покоління. В останнє десятиліття в сфері освіти значно збільшився інтерес до освітньої робототехніки.
Унікальність цієї освітньої технології полягає в міждисциплінарних заняттях, що засновані на активному навчанні, та інтегрують у собі науку, технологію, інженерну справу, математику. Робототехніка представляє учням технології XXI століття величезні можливості, сприяє розвитку їх комунікативних здібностей, просторової уяви, розвиває навички взаємодії, самостійності при прийнятті рішень, розкриває творчий інтелектуальний потенціал.
Залучення школярів до досліджень у галузі робототехніки, обміну технічною інформацією і початковими інженерними знаннями, розвитку нових науково-технічних ідей дозволяє створити необхідні умови для високої якості освіти, за рахунок використання в освітньому процесі нових педагогічних підходів і застосування нових інформаційних технологій.
Посібник містить теоретичний матеріал та розробки завдань для уроків з інформатики, математики, фізики, проведення занять в гуртку робототехніки та моделювання, а також міждисциплінарних занять природничо-математичного циклу.
ПРАВИЛА РОБОТИ
|
Збільшення ваги – обтяжливо і для вас, і для робота. |
Додавання деталей завжди ![]() приводить до
зниження швидкості робота.
приводить до
зниження швидкості робота.
|
Різкі рухи – це недолік вашого робота. |
Не вмикайте
максимальну ![]() потужність
моторів без
потужність
моторів без
особливої потреби!
|
|
|
Захищайте робота від брудного зовнішнього середовища.
|
|
|
Завжди перевіряйте рівень заряду батареї.
|
Якщо робот нічого не робить, то й енергію він використовувати не повинен. |
![]() Не забувайте
виключати вашого робота!
Не забувайте
виключати вашого робота!
|
Вам було б приємно, якби вам видалили зуб без обезболювання? |
Всі підключення датчиків і ![]() моторів тільки у
виключеному стані робота!
моторів тільки у
виключеному стані робота!
|
Уявіть, що це робот змушує вас виконувати програму а не навпаки |
Чим пізніше ви
знайдете ![]() помилку, тим
більше часу піде на її виправлення!
помилку, тим
більше часу піде на її виправлення!
ЗМІСТ
1.4 Загальний план роботи над робототехнічним завданням....................... 10
РОЗДІЛ 2. ОСНОВНІ ТЕМИ ТА ЗАВДАННЯ............................................... 12
2.10 Визначаємо відстань до об’єкта............................................................ 52
2.11 Приклади завдань для проектної роботи.............................................. 55
РОЗДІЛ 3. ПІДСУМКИ РОБОТИ................................................................... 63
3.1 Підготовка до FLL. Наш робот Коала.................................................... 63
3.2 Досвід – син помилок важких................................................................. 66
СПИСОК ВИКОРИСТАНИХ ДЖЕРЕЛ......................................................... 68
ІНСТРУКЦІЯ «РОБОТ П’ЯТИХВИЛИНКА »............................................... 70
РОЗДІЛ 1. ОСНОВНІ ПРИНЦИПИ ІНТЕГРАЦІЇ РОБОТОТЕХНІКИ В НАВЧАЛЬНИЙ ПРОЦЕС
1.1 Для чого це потрібно?
Робототехніка є однією з нових сфер застосування основ алгоритмізації та програмування, вона є популярним і ефективним методом для вивчення важливих галузей науки, технології, конструювання. Роботів використовують, в основному, на виробництві, проте, не зупиняючись на досягнутому, їх намагаються впровадити у повсякденність. Фундаментом для робототехніки слугують електроніка, механіка та програмування. Більшість сучасних технічних галузей неможливо уявити без використання роботизованих систем виробництва. В свою чергу, розвиток таких галузей потребує підготовки кваліфікованих фахівців. Це ставить нові завдання перед сучасною системою освіти. Саме тому робототехніка стала одним із популярних напрямів позакласної освіти учнів.[1]
Робототехніка передбачає проектування, конструювання та програмування механізмів – роботів, що мають модульну структуру та побудовані на потужних мікропроцесорах. Робототехніка – прикладна наука, що займається розробкою автоматизованих технічних систем та є одним з перспективних напрямів в галузі інформаційних технологій. Освітня робототехніка – це нова, актуальна педагогічна технологія, що дозволяє підвищити мотивацію учнів до навчання, тому що для цього потрібні знання практично з усіх навчальних дисциплін від мистецтв і трудового навчання до математики, фізики та інформатики. Педагоги, які використовують у своїй практиці робототехніку, можуть досягти цілого ряду цілей:
ü колективно працювати над ідеями;
ü аналізувати результати та шукати нові рішення;
ü проводити систематичні спостереження;
ü розвивати логічне мислення;
ü навчити учнів встановлювати причинно-наслідкові зв’язки.
Якщо учень цікавиться робототехнікою з початкової школи, він може відкрити для себе багато цікавого та, що важливо, розвинути вміння, що знадобляться для отримання професії у майбутньому.
Але, на жаль, методичних матеріалів з даного напрямку на сьогоднішній день мало. Учителям доводиться освоювати новий предмет. Як правило, вони розробляють власні плани занять, що відповідають індивідуальним особливостям учнів та дотримуються загальноприйнятої послідовності:
ü сформулювати загальні принципи робототехніки;
ü ознайомити учнів з основними поняттями;
ü зібрати та вивчити одну або декілька принципових моделей;
ü зібрати та вивчити основну модель та виконати завдання; ü виконати творче завдання.
Також робототехніка використовується педагогами при вирішенні комунікативних проблем учнів, оскільки це командна робота. Крім цього, робототехніка дозволяє урізноманітнити уроки інформатики та інших предметів, допомагаючи відповісти на питання учнів: «Навіщо мені це потрібно? Де мені це стане в нагоді? Навіщо мені знати закони фізики? Де математика стане в нагоді в житті?». Вона допомагає на практиці глибше вивчити деякі теми з інших предметів, дозволяючи розкрити потенціал учня та допомогти йому в подальшому з вибором професії. Незалежно від того, який професійний шлях обере учень, у майбутньому його робота, так чи інакше, буде пов'язана з використанням новітніх технологій.
1.2 Що потрібно знати?
Навчання робототехніці в рамках шкільного курсу можна умовно поділити на три етапи: початкова, середня і старша школи. Для навчання робототехніці в початковій школі може бути використаний конструктор Lego WeDo, що складається зі стандартних деталей Lego, а також набору датчиків і приводів, що підключаються через USB. У комплекті з даним конструктором поставляється програмне забезпечення, що містить просте, інтуїтивно зрозуміле середовище програмування. Крім цього, разом з набором поставляється комплект задач, що представляють собою 12 окремих проектів з докладним покроковим описом їх виконання. Це дозволяє учневі самостійно збирати і програмувати діючі моделі, а потім використовувати їх для виконання практичних завдань.
Для навчання робототехніці в середній школі може бути використаний конструктор Lego Mindstorms. Він складається зі стандартних деталей Lego (планки, осі, колеса, шестерні), сенсорів, двигунів і програмованого блоку NXT [2]. Наявність окремого програмованого блоку разом з середовищем програмування робить даний набір серйозним інструментом, що дозволяє створювати роботів для вирішення досить складних завдань. Важливою перевагою Lego Mindstorms є його простота і гнучкість. Набір дозволяє підібрати необхідні деталі практично під будь-яке завдання, або об'єднати декілька наборів для вирішення складних завдань.
З педагогічної точки зору, використання подібних наборів має ряд важливих переваг. По-перше, це стимулювання мотивації учнів до отримання знань. При роботі з конструктором учень бачить плоди своєї праці та має можливість застосувати отримані знання на практиці. Крім того, створення робота передбачає активну творчу діяльність дитини. Це реалізується через розв’язання учнем нестандартних задач та великою кількістю варіантів рішення. По-друге, це розвиток інтересу учнів до техніки, програмування і конструювання. Використання подібних конструкторів в освітньому процесі веде до популяризації професії інженера, а також прищеплює учням інтерес до робототехніки. По-третє, це формування навичок програмування, розвиток логічного та алгоритмічного мислення.
Для того, щоб навчитися створювати роботів і писати для них програми, учням необхідно засвоїти додаткові специфічні знання з механіки, радіоелектроніки та програмування. Одних знань для створення роботів недостатньо. Учням необхідно отримати відповідні уміння та навички.
У результаті навчання як в області механіки, так і в області електроніки, учні повинні:
ü навчитися визначати функції та технічні характеристики компонентів робота (механічних та електронних);
ü вміти розраховувати і виготовляти необхідні механічні, електронні та електричні компоненти;
ü вміти зобразити зовнішній вигляд певної конструкції і пояснити іншим людям принцип дії, довести правильність її роботи.
В області програмування роботів учні повинні:
ü вміти отримувати та обробляти вхідні сигнали робота (від датчиків, кнопок та ін.);
ü програмним способом управляти вихідними пристроями робота (механізмами, пристроями індикації, звуковими пристроями та ін.);
ü створювати програми відповідно до технічного завдання.
Найбільшою мірою знання, вміння та навички потрібні при створенні самокерованих роботів: тут знаходять своє застосування всі дисципліни (фізика, математика, програмування). При використанні конструкторів присутні лише незначні фрагменти знань з фізики, проте знання з математики та програмування можуть бути застосовані у більшій мірі. Отже, якісне освоєння учнями основ робототехніки вимагає не просто вивчення ними таких галузей, як механіка, радіоелектроніка та програмування, але і розгляду всіх взаємозв'язків між ними. [3]
Все вищесказане свідчить про те, що використання наборів та конструкторів у процесі навчання інформатики дозволяє перейти до вивчення основ робототехніки, а також подолати недоліки традиційного підходу в навчанні програмуванню і вивести його на новий рівень.[4]
1.3 Як відбувається навчання?
Сучасна людина бере участь в розробці, створенні та споживанні величезної кількості артефактів: матеріальних, енергетичних, інформаційних. Відповідно, вона повинна орієнтуватися в навколишньому світі як свідомий суб'єкт, адекватно сприймати появу нового, вміти орієнтуватися в навколишньому світі, що постійно змінюється, готова безперервно вчитися. Розуміння феномена технології, знання законів техніки, дозволить молодшому школяреві відповідати запитам часу і знайти своє місце в сучасному житті.
Учні, працюючи за інструкціями і завданнями вчителя, відчувають зібрані моделі і аналізують запропоновані конструкції. Далі вони виконують самостійну роботу по темі, запропонованої вчителем. Допомога вчителя при даній формі роботи зводиться до визначення основних напрямків роботи та до консультування учнів.
Самостійна робота виконується учнями у формі проектної діяльності, може бути індивідуальною, парної і групової. Виконання проектів вимагає від дітей широкого пошуку, структурування і аналізування додаткової інформації по темі.
Завдяки датчикам повороту і відстані, створені конструкції реагують на оточуючих світ. За допомогою програмування на персональному комп'ютері дитина наділяє інтелектом свої моделі і використовує їх для вирішення завдань, які, по суті, є вправами з курсів математики, інформатики.
На сучасному етапі економічного і соціального розвитку освіти має бути орієнтована на:
ü формування у підростаючого покоління адекватної сучасному рівню знань картини світу;
ü забезпечення самовизначення особистості;
ü створення умов для самореалізації особистості;
ü формування людини, інтегрованого в сучасне суспільство і націленого на вдосконалення цього суспільства;
ü відтворення і розвиток кадрового потенціалу суспільства.
Новизна полягає в зміні підходу до навчання, а саме – впровадження в освітній процес нових інформаційних технологій, які спонукають учнів вирішувати найрізноманітніші логічні і конструкторські проблеми.
Вивчення кожної теми передбачає виконання невеликих проектних завдань, що реалізуються за допомогою досліджуваних технологій.
Основні методи навчання:
1. Усний
2. Проблемний
3. Частково-пошуковий
4. Дослідницький
5. Проектний
1.4 Загальний план роботи над робототехнічним завданням
Планування (складання плану дій) – це перший крок для отримання хорошого результату. Продумуйте і записуйте дії, які збираєтесь робити. Будь-яке завдання в робототехніці складається з двох різних, тісно пов'язаних частин:
ü апаратної (конструювання безпосередньо робота);
ü програмної (створення керуючої роботом програми).
При експериментуванні потрібно брати до уваги обидві частини.
Виконуючи проекти, користуйтеся наступним планом роботи:
1. Розробка і конструювання робота або коригування конструкції.
2. Написання алгоритму.
3. Перетворення алгоритму в програму.
4. Тестування програми.
5. Внесення виправлень і покращень в конструкцію робота, алгоритм і програму.
Дуже важливий елементи – це групова робота. Потрібно розділити ролі фахівців зі створення роботів.
Працюємо в групах. Кожна група – це Конструкторське бюро.
Керівник – організовує роботу своїх підлеглих.
Програміст – відповідає за створення і тестування програми керуючої моделлю.
Конструктор – відповідає за створення моделі з деталей конструктора. Після закінчення роботи відповідає за збереження матеріалів і конструкцій, за чистоту робочих місць.
Експериментатор – відповідає за тестування створеної моделі, дає рекомендації щодо зміни конструкції і програми.
Але щоб група під час виконання впоралася із завданням, всі допомагаємо один одному.
РОЗДІЛ 2. ОСНОВНІ ТЕМИ ТА ЗАВДАННЯ
2.1 Робот. Робот EV3
Робот – це автоматичний пристрій для здійснення виробничих та інших операцій за певною програмою.
Отже, робот – це автоматична машина, яка: ü відповідає на зовнішні впливи; ü працює за програмою.
У робота є три важливі характеристики:
ü мобільність (швидка зміна видів робіт);
ü універсальність (виконання великого числа завдань);
ü автоматизм (після програмування працює автоматично).
![]()
Завдання 1
За допомогою мережі Інтернет підготуйте невелику доповідь з мультимедійною презентацією за наступними темами:
1. Роботи та давньогрецькі міфи.
2. Перші механічні прототипи роботів.
3. Роботи в літературі.
4. Роботи в кіно.
5. Андроїд.
6. Промислові роботи.
7. Побутові роботи.
8. Персональні роботи.
9. Системи пересування роботів.
![]()
Для вивчення основ робототехніки ми будемо використовувати освітній робототехнічний конструктор, з якого можна створювати моделі різних роботів і автоматизованих пристроїв.
Його основні частини (як і будь-якого робота): блок управління, двигуни і датчики. Схема підключення зображена на Рис. 1, уважно вивчіть її.
Знайомлячись з конструктором, зверніть увагу, що всі датчики підключаються до портів з цифрами (1, 2, 3, 4), а мотори – до портів з буквами (A, B, C, D).
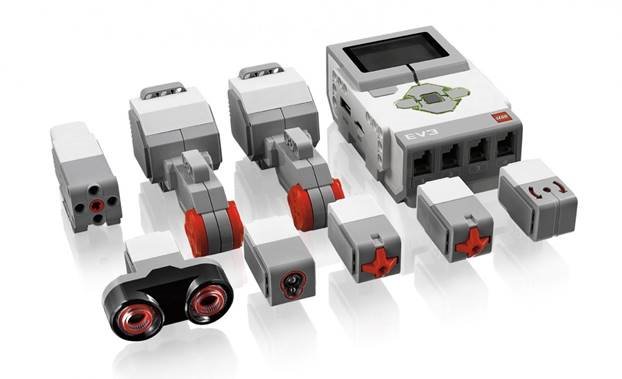
Рис. 1. Структура набору з робототехніки
Блок управління підключається до комп’ютера через USB-порт або Bluetooth.
Завдання 2
Ви хочете, щоб робот на наступних заняттях був «Живий» і «здоровий»? Тоді уважно прочитайте правила роботи і дотримуйтесь їх (Додаток 1).
Завдання 3
Уважно вивчіть всі складові деталі освітнього робототехнічного конструктора.
Завдання 4
На рис. 1 вкажіть всі основні елементи комплекту LEGO MINDSTORMS Education EV3.
Завдання 5
Заповніть таблицю 1, вказавши номер порту, до якого підключається кожен сенсор, і призначення даного сенсора.
Таблиця 1
Підключення сенсорів
|
Сенсор |
№ порту |
Для чого потрібен? |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|




14
Завдання 6
Заповніть таблицю 2, вказавши, який мотор підключається до даного порту, і його призначення.
Таблиця 2 Підключення моторів
|
Порт підключення |
Який мотор? |
Для чого використовується? |
|
A |
|
|
|
B |
|
|
|
C |
|
|
|
D |
|
|
Завдання 7
Подивіться на деталі, зображені на рис. 2. Знайдіть такі деталі в наборі і спробуйте дізнатися, в чому їх істотні відмінності і для яких цілей їх застосовують.

Рис. 2. З’єднувальні деталі конструктора
Завдання 8
Складіть свого першого робота п’ятихвилинку за інструкцією поданою в Додатку 2. Змусьте його рухатися.
2.2 Діаметр і довжина кола
Коли інженери управляли місяцеходом, як вони дізнавалися, яку відстань він пройшов? Ми скоро відповімо на це питання: теж будемо точно дізнаватися, яку дистанцію пройшов робот, якого ми не бачимо. Тому давайте звернемося до математики – мови будь-якої науки – і згадаємо деякі поняття.
Коло – це замкнута лінія, всі точки якої рівновіддалені від однієї точки – центра кола.
Радіус – це відстань від центру кола до будь-якої її точки.
Діаметр – це відрізок, що з'єднує дві точки кола і проходить через її центр.
Колесо нашого робота по формі є колом. Тому, щоб дізнаватися, яку відстань він пройде, необхідно навчитися точно знаходити довжину кола (позначимо її L, рис. 3).
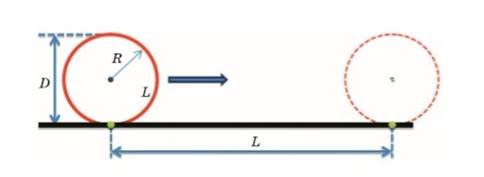
Рис. 3. Модель руху колеса
![]()
Завдання 1
Практична робота «Не вір очам своїм»
Для наступного експерименту нам будуть потрібні чотири види коліс (рис. 4). На їх шинах є маркування: «43,2», «56», «62,4» і «68,8». Це вказані діаметри коліс в міліметрах. Однак краще, якби ви виміряли їх самостійно. Якщо помилочку в долі міліметра, наприклад, помножити на 100000 оборотів – вийде гігантська цифра!

Рис. 4. Колеса для експерименту
Виміряйте за допомогою штангенциркуля (або іншого вимірювального інструмента) діаметри різних коліс. Результати занесіть в таблицю 3.
Завдання 2
Експеримент «Шукаємо взаємозв'язок величин»
Вам необхідно виміряти шлях L, пройдений роботом за один оборот колеса, використовуючи при цьому колеса різного діаметру.
Проведіть експеримент і запишіть результати.
1. Покладіть на столі рулетку (або інший вимірювальний інструмент).
Вимірювання переміщення робота проводите точно по осі колеса.
2. Для кожного колеса проведіть три виміри. Результати записуйте в таблицю (табл. 4).
![]()
3.
В останньому стовпці обчисліть відношення ![]() .
.
4. Зробіть висновок з таблиці.
Таблиця 3
Результати вимірювань
|
Маркування колеса |
Виміряний діаметр колеса |
Номер вимірювання |
Пройдена відстань |
|
|
43,2 мм |
|
1 |
|
|
|
2 |
|
|
||
|
3 |
|
|
||
|
Маркування колеса |
Виміряний діаметр колеса |
Номер вимірювання |
Пройдена відстань |
|
|
56 мм |
|
1 |
|
|
|
2 |
|
|
||
|
3 |
|
|
||
|
62,4 мм |
|
1 |
|
|
|
2 |
|
|
||
|
3 |
|
|
||
|
68,8 мм |
|
1 |
|
|
|
2 |
|
|
||
|
3 |
|
|
Завдання 3
Сформулюйте гіпотези за результатами проведеного експерименту.
Завдання 4
За результатами експерименту зробіть висновки. Поясніть, чому виходили різні значення (тобто існує розкид в показаннях).
Завдання 5
Запишіть формулу для знаходження довжини кола.
Завдання 6
Обчисліть, скільки оборотів колеса треба задати в налаштуваннях блоку Рульове управління, щоб робот проїхав відстань 1 м.
![]()
Трохи історії
π (вимовляється «пі») – це число, яке дорівнює
відношенню довжини кола до довжини діаметра кола. Позначається буквою грецького
алфавіту. У грецькому слові «периметр» π – це перша буква. Факт однаковості для
будьяких кіл відношення довжини кола до діаметра був відомий ще
староєгипетським (![]() ), вавилонським (
), вавилонським (![]() ), давньогрецьким
), давньогрецьким ![]() )
математикам. А першим для
)
математикам. А першим для
позначення цей символ використовував англійський математик Джон Вільям в 1706 році.
Треба тільки постаратися і запам'ятати все як є: 3, 14, 15, 92 і 6.
![]()
![]()
Завдання 7
Запишіть формулу знаходження кола, знаючи її діаметр.
Завдання 8
Запишіть формулу знаходження кола, знаючи її радіус.
Завдання 9
Запишіть значення числа π з точністю до семи знаків після коми.
Завдання 10
При написанні програми для марсохода інженер N округлив число π до 3,14. Діаметр коліс марсохода становить 1 м. Коли помилку виявили, датчик обертів колеса зафіксував 100 тис. Оборотів. Визначте, на скільки метрів свідчення відрізнялися від реально пройденої відстані.
Завдання 11
Проект «Робот калькулятор»
Давайте зробимо з робота простенький калькулятор: кількість натискань на кнопку датчика дотику задає радіус кола, а на екрані з'являється його довжина.
Завдання 12
Складіть для робота-калькулятора програму обчислення довжини кола по введеному значенню діаметру (рис. 5). Не забудьте її вдосконалити.
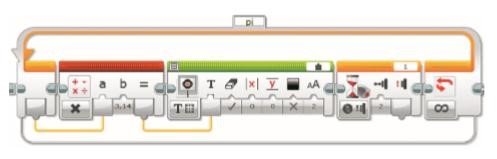
Рис 5. Програма обчислення довжини кола
Завдання 13
Заповніть пропуски.
Коло – це _____________ лінія, всі __________ якої
_____________________ від однієї точки, яку називають ______________ кола.
Радіус – це відстань від __________ до ____________ точки кола.
Діаметр – це _____________, що з'єднує __________ точки кола і проходить через ________________.
2.3 Вимірюємо відстань
Нашого робота можна використовувати в якості одометра. Що ж це за слово таке? Другу частину ви знаєте точно: це «міра». Значить, щось вимірюють. Грецьке «одос» – дорога, шлях.
Одометр – прилад для вимірювання пройденого транспортним засобом шляху. Зазвичай він складається з індикатора і пов'язаного з ним датчика обертання колеса.
На прикладі нашого робота ми можемо гордо сказати, що наш майбутній одометр буде цифровим, так як відстань відобразить його рідкокристалічний дисплей, а переведенням обертів колеса в відстань займеться електронний блок управління.
Математична модель одометра
Ми з вами знаємо, що відстань L, пройдена за один оборот колеса, обчислюється за формулою:
![]() , де D – діаметр
колеса, а π – це константа.
, де D – діаметр
колеса, а π – це константа.
Крім оборотів в налаштуваннях датчика є градуси. Скільки градусів в одному обороті? Правильно – 360.
Значить, за поворот колеса на ![]() робот проїде
відстань, в 360 разів менше.
робот проїде
відстань, в 360 разів менше.
Отримуємо, що при
повороті колеса на ![]() робот пройде шлях, рівний
робот пройде шлях, рівний
![]() . Якщо ж колесо повернеться не на
. Якщо ж колесо повернеться не на ![]() , а на
, а на ![]() ,
то пройдений шлях
,
то пройдений шлях
(позначимо його S) ми знайдемо за формулою:
![]()
де ![]() – число градусів
повороту колеса;
– число градусів
повороту колеса; ![]() – діаметр колеса.
– діаметр колеса.
Ми описали роботу одометра з використанням математичних формул і креслення (рис. 6).
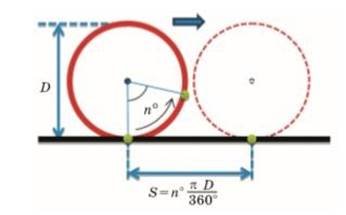
Рис. 6. Математична модель одометра
Такий опис називається математичною моделлю. При описі об'єктів, процесів і явищ математична модель є необхідним елементом.
Проект «Одометр»
Отже, нам необхідно, щоб на екрані нашого робота відображалося пройдену відстань. Відразу домовимося про одиниці виміру – це будуть сантиметри.
Діаметр колеса нам відомий: 56 мм. Переводимо в сантиметри: 5,6 см.
Тоді формула (1) прийме наступний вигляд:
![]()
Далі можна застосовувати отриманий нами коефіцієнт в інших програмах.
![]()
Завдання 1
Запрограмуйте робота-одометра. Алгоритм вказано на рис. 7.
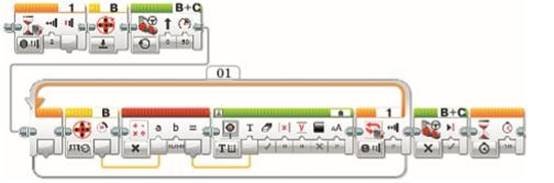
Рис 7. Програма робота-одометра Завдання 2
Заповніть пропуски.
________________ модель – це спрощене ____________ об'єкта, явища або процесу за допомогою математичних понять і _________________.
Завдання 3
Заповніть таблицю 4, використовуючи комп'ютерний калькулятор. Відстань вкажіть з точністю до двох знаків після коми.
Таблиця 4 Відстань, пройдена роботом, обчислене на калькуляторі
|
Настройка блоку «Рульове керування» |
Відстань пройдена роботом (см)
|
|
180 |
|
|
|
|
|
|
|
|
|
|
22
Завдання 5
Складіть для обчислень електронну таблицю (табл. 5), наприклад в Excel. Відстань вкажіть з точністю до двох знаків після коми.
Таблиця 5
Відстань, пройдена роботом, обчислене в електронній таблиці
|
|
А |
В |
|
1 |
Настройка блоку «Рульове керування» |
Відстань пройдена роботом (см)
|
|
2 |
180 |
|
|
3 |
|
|
|
4 |
|
|
|
5 |
|
|
Завдання 6
Візьміть рулетку і проведіть випробування робота-одометра на дистанції 1 м. Підберіть коефіцієнт так, щоб розходження у вимірах були мінімальними.
Завдання 7
Вкажіть, яку відстань проїде робот, якщо в налаштуваннях мотора вказати 220 ?
Завдання 8
На скільки градусів має повернутися вал лівого і правого двигуна, щоб робот проїхав вперед на:
а) 10 см б) 25 см в) 40 см г) 60 см?
Завдання 9
Проведіть експериментальну перевірку, написавши програми руху робота на зазначені відстані.
Заповніть таблицю 6.
Таблиця 6
|
Відстань пройдена роботом |
Кут повороту лівого і правого колеса |
|
10 см |
|
|
25 см |
|
|
40 см |
|
|
60 см |
|
2.4 Точний поворот
Мінімальний радіус повороту
Давайте подивимося, як повертають сучасні автомобілі. Здатність автомобіля повертатися на заданій площі характеризується мінімальним радіусом повороту. Як же його знайти? Побудуємо дві прямі: першу – через вісь задніх коліс (на рис. 8 позначена цифрою 1), а другу – через вісь ближнього колеса, в бік якого ми повертаємо (позначена 3). Точка перетину і є центр повороту (позначений зірочкою).
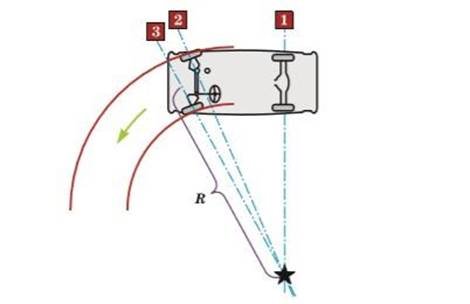
Рис. 8. Радіус повороту автомобіля
Якщо відстань від центру повороту до ближнього колеса скласти з відстанню до дальнього колеса (позначено 2) і розділити навпіл, то ми отримаємо мінімальний радіус повороту R. Мінімальний радіус повороту – обов'язковий параметр технічної характеристики будь-якого автомобіля. Наприклад, у ВАЗ-2170 ( «Лада Пріора») він дорівнює 5,5 м, отже, при будьякому повороті «Лада» не зможе наблизитися до центру більше, ніж на вказану відстань.
Як може повертати робот?
Якщо звичайний автомобіль має всього один спосіб повороту (спортивний спосіб водіння розглядати не будемо), то наш робот може змінити напрямок руху трьома способами (Таблиця 7).
Таблиця 7
Методи поворотів робота
|
|
Схема |
Налаштування |
|
|
|
|
|
|
|
|
|
|
|
|




![]()
Завдання 1
Знайдіть через пошукові системи автомобіль, у якого найменший радіус повороту. Зверніть увагу, для яких цілей випускає його компаніявиробник.
Завдання 2
Тепер трохи чудес ... Здогадайтеся, який мінімальний радіус повороту у нашого робота.
Проект «Налаштування для поворотів»
Завдання 3
Експериментально визначте налаштування блоків Рульове управління і Незалежне керування моторами для здійснення повороту робота.
Завдання 4
Заповніть таблицю 8, вказавши. скільки градусів обороту осі мотора відповідає розвороту робота.
Таблиця 8 Відповідність обороту осі мотора розвороту робота
|
|
Поворот робота (на місці) |
|||
|
|
|
|
|
|
|
Число градусів обертання осі мотора в налаштування блока Рульове управління |
|
|
|
|
Завдання 5
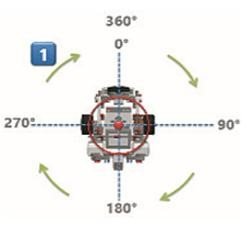
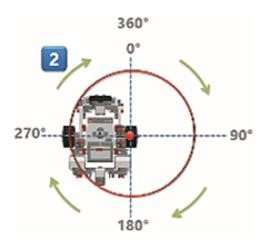
Робота необхідно навчити точно повертатися на 90 , 180 , 270 і 360 . Експериментально знайдіть число градусів, яке необхідно вказати в налаштуваннях блоків, і заповніть таблицю 9.
Таблиця 9 Відповідність повороту робота числу градусів, знайдених експериментально
|
Поворот |
Метод повороту |
|
|
Плавний |
Швидкий |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|


Завдання 6
Складіть алгоритм паркування в гаражний бокс №2 з позиції №1.
Заповніть пропуски в алгоритмі руху робота (Таблиця 10).
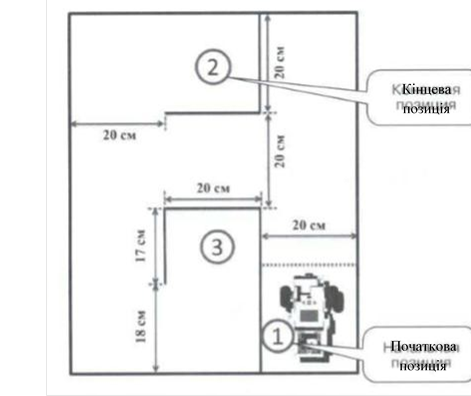
Рис. 9. Паркування в бокс
Таблиця 10
|
№ |
Дія |
Характеристика |
Налаштування мотора |
|
1 |
Вперед |
на _____ см. |
|
|
2 |
Поворот |
_________ на ______ градусів |
|
|
3 |
Вперед |
на _____ см. |
|
|
4 |
Поворот |
_________ на ______ градусів |
|
|
5 |
Вперед |
на _____ см. |
|
|
6 |
Поворот |
_________ на ______ градусів |
|
|
7 |
Вперед |
на _____ см. |
|
Завдання 7
Як змінити закінчення алгоритму, щоб робот заїхав в гаражний бокс №2 заднім ходом?
|
5 |
Вперед |
на _____ см. |
|
|
6 |
Поворот |
_________ на ______ градусів |
|
|
7 |
Вперед |
на _____ см. |
|
Завдання 8
Запрограмуйте робота для руху по заданому шляху. Подумайте, як ваш робот буде проходити повороти, де зупинятись. Успіху!
а) б)
Завдання 9
Використовуючи метод пропорції заповніть таблицю 11.
Таблиця 11
|
Градуси оберту |
Відстань |
|
720 |
51 |
|
1412 |
|
|
|
61 |
|
|
55 |
Завдання 10
На скільки градусів має провернутися вал лівого двигуна, щоб робот повернувся вправо на кут в:
а) 45 градусів б) 90 градусів в) 180 градусів?
Завдання 11
Проведіть експериментальну перевірку, написавши програми повороту робота на зазначені кути.
Запустіть програми кілька разів, яка похибка руху робота? Наскільки відрізняються кути повороту робота при виконанні однієї і тієї ж програми?
Заповніть таблицю 12.
Таблиця 12
|
Кут повороту корпусу робота |
Кут повороту лівого колеса робота |
|
450 |
|
|
900 |
|
|
1800 |
|
|
10 |
|
2.5 Вимірюємо час
Історично основною одиницею для вимірювання інтервалів часу є доба. Доба приблизно дорівнює періоду обертання Землі навколо своєї осі. Ділити добу на години, хвилини і секунди почали в Стародавньому Вавілоні.
Доба складається з дня і ночі і діляться на 24 години. Щогодини містить 60 хвилин, кожна хвилина – 60 секунд.
Секунда з давніх-давен визначалася як 1/86400-а частина часу обороту Землі навколо своєї осі. Ця секунда через нерівномірність обертання нашої планети не була постійною. У 1956 році було введено поняття ефемеридної секунди: 1/31556925,9747-а частка тропічного року. У 1950-х роках був винайдений атомний годинник, точність яких сильно перевищує точність астрономічних періодів часу. Новим еталоном стала атомна секунда. У 1964 році ввели всесвітній координований час, за яким ми з вами зараз живемо і звіряємо свої годинник.
Щоб зв'язати атомний час і земний, показання годин підганяють таким чином, щоб значення не розходилися більш ніж на 0,9 с. Для цього періодично в рахунок часу додають додаткову секунду координації (або «високосну секунду»).
Що може статися за 1 с? Світло подолає відстань більш ніж в 299 тис.
км, а Земля пройде по орбіті 29 785,9 м. Секунда є однією з семи основних одиниць Міжнародної системи одиниць (позначення: с, s).
Таймер
Наш робот теж може вимірювати час. Він має вісім таймерів. Таким чином, можна засікати час для восьми різних дій одночасно. Для вимірювання часу використовується блок Таймер. Це датчик часу. За допомогою цього блоку знімають поточні показання таймера або скидають таймер. Особливість таймера в тому, що він може вимірювати час в мілісекундах (мс):
![]() с
с![]() мс
мс![]() або
або![]() мс
мс![]() с
с![]()
![]()
Проект «Секундоміри»
Завдання 1
Складіть програму, що виводить на екран час, що минув з моменту натискання на датчик дотику.
Завдання 2
Складіть для робота програму, яка починає відлік часу після натискання на кнопку і аналогічно зупиняє час.
Проект «Старт»
Завдання 3
Зберіть модель «Старт» (рис. ) і підключіть її до робота. Складіть програму таймер.

Рис. 10. Модель «Старт»
Завдання 4
Секундомір повинен включатися і вимикатися однією кнопкою. В алгоритмі (рис. 11) є помилки. Знайдіть їх і виправте.
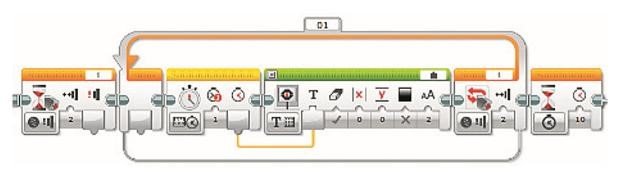
Рис. 11. Секундомір
2.6 Швидкість
Ви можете відразу сказати, що літак рухається швидше
автомобіля, а штучний супутник Землі – швидше літака. Швидкість руху
характеризують швидкістю. По-перше, ви знаєте, що: Про дена![]() відстань
відстань![]()
Швидкість![]()
ас![]() руху
руху
Значить, для знаходження швидкості нам повинні бути відомі час руху і відстань (пройдений шлях). По-друге, ви вже знаєте, як зробити прилад для вимірювання відстані (одометр) і прилад для вимірювання проміжків часу (хронограф). Якщо поєднати можливості двох приладів, то вийде спідометр – прилад для вимірювання швидкості руху транспортного засобу.
Всі результати ми будемо бачити у вигляді чисел на цифровому екрані, значить, наш прилад – цифровий спідометр.
Складемо для цього спідометра математичну модель.
Нехай робот буде рухатися 5 с і проїде невідому поки нам відстань S:
![]()
де n – кут повороту колеса навколо осі (у градусах); π – константа (≈ 3,141593); D – діаметр колеса.
Значить, швидкість руху нашого робота ми знайдемо так:
![]()
![]()
Завдання 1
Складіть програму, що вимірює швидкість руху робота (Рис 12).

Рис. 12. Спідометр
Завдання 2
Виміряйте відстань, пройдену роботом за 5 с. Обчисліть швидкість робота (на калькуляторі). Порівняйте з тим значенням, яке ви бачили на екрані робота.
Завдання 3
1. Запишіть результати експерименту:
а) Значення, швидкості на екрані робота: __________ см/с.
б) Відстань, пройдена роботом за 5 з: _________ см.
в) Швидкість робота ______________ см/с.
2. Ваші гіпотези про причини відмінності результатів.
Завдання 4
Дайте відповідь на наступні питання:
1. Що вам не подобається в такій програмі?
2. Як її можна поліпшити?
3. Чому швидкість на екрані не збігається з тим значенням, яке ви вирахували?
Швидкість рівномірного руху
Давайте розбиратися, чому значення на практиці (експериментальні) не співпали з тими, які ми вираховували (теоретичними). У русі нашого робота, як і будь-якого іншого транспортного засобу, присутні розгін і гальмування. При розгоні швидкість збільшується, при гальмуванні – зменшується, а між цими етапами робот їде з незмінних (постійної) швидкістю. Рух, при якому швидкість на всіх ділянках шляху постійна, називається рівномірним рухом
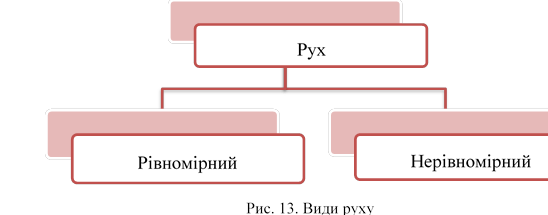
Рух, при якому швидкість на різних ділянках шляху різна, називається нерівномірним рухом.
Швидкість об'єкта при рівномірному русі показує, який
шлях він проходить за одиницю часу (за 1с). Отже, для визначення швидкості
об'єкта потрібно пройдений ним шлях розділити на час його руху. Введемо
позначення: ![]() – шлях;
– шлях; ![]() – швидкість;
– швидкість; ![]() – час. Тоді
формула для знаходження швидкості буде мати вигляд:
– час. Тоді
формула для знаходження швидкості буде мати вигляд:
![]()
За одиницю швидкості беруть 1 метр за секунду (м/с). 1 м/с – це швидкість руху, при якому об'єкт за одну секунду проходить шлях, рівний 1 м. Часто доводиться застосовувати ще одну одиницю швидкості – 1 км/год
(кілометри на
годину). Ви знаєте, що 1![]() км
км![]() 1000
1000![]() м
м![]() а
а![]() 1
1![]() год
год![]() 60
60![]() хв
хв![]()
![]() 3600
3600![]() с, тоді
с, тоді
1000![]() м 10
м 10![]() м
м
1км![]() год
год![]()
![]()
3600![]() с 36
с 36![]() с
с
1м![]() с
с![]() 3
3![]() 6
6![]() км
км![]() год
год
Крім числового значення швидкість має напрямок. Знайдіть на рис. 14 стрілку, що вказує, в якому напрямку рухається об'єкт. Ця стрілка називається вектором швидкості.
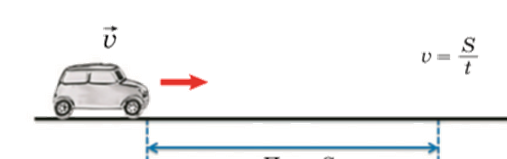
Рис. 14. Рух автомобіля
Швидкість нерівномірного руху
У нашому випадку рух робота був нерівномірним – він розганявся і гальмував. Чим же охарактеризувати швидкість в цьому випадку?
Швидкість нерівномірного руху характеризується середньою швидкістю. Середню швидкість знаходять так само, як і швидкість рівномірного руху, тобто пройдений тілом шлях ділять на час руху:
![]()
При цьому додають літери «ср», що означає «середня». Середня швидкість не збігається зі швидкістю руху тіла на окремих ділянках шляху:
на одних ділянках вона менше, на інших – більше.
Завдання 1
Розкажіть, яка швидкість відображалася на екрані робота.
А яку швидкість знайшли ми?
Завдання 2. Проект «Спідометр»
Складіть програму «Спідометр» , що відображає швидкість руху робота в метрах в секунду (м/с). Змініть програму, щоб на екрані відображалися одиниці виміру. Створіть програму, яка показує швидкість в кілометрах в годину.
Завдання 3
Заповніть пропуски.
Рух, при якому _________________________ на всіх ділянках шляху ___________________________, називається рівномірним рухом. Рух, при якому ____________________________________ на різних ділянках шляху
______________________, називається нерівномірним рухом. Швидкість
_________________________________________ руху характеризується
_________________________. Середня швидкість знаходиться так само, як і швидкість ___________________________ руху, тобто про дени тілом ____________ ділиться на _________________ руху.
Завдання 4
За допомогою програми із Завдання 1 проведіть дослідження «Залежність швидкості руху робота від настройки параметра Потужність».
Заповніть таблицю 13.
Таблиця 13
|
Потужність мотора (%) |
Швидкість (м/с) |
|
20 |
|
|
40 |
|
|
60 |
|
|
80 |
|
|
100 |
|
Ваші гіпотези щодо залежності результатів?
Зробіть висновок про залежність швидкості руху від налаштування Потужність.
Завдання 5
Дізнайтесь
максимальну швидкість руху робота. Проведіть експеримент:
виміряйте яку відстань пройде робот за 5 секунд (по осі колеса) і проведіть
розрахунки. ас ![]() 5
5![]() .
.
Про дени
шлях: ![]() ______________ (см)
______________ (см) ![]() ___________ (м)
Швидкість:
___________ (м)
Швидкість: ![]() ______________ (м/с)
______________ (м/с) ![]() ___________
(км/год).
___________
(км/год).
У кого найшвидший робот?
Порівняйте зі швидкістю першого місяцехода:
«Луноход-1» – 1,2 км/год Робот EV3 – _________ км/год
Завдання 6
При виконанні завдань у всіх роботів вийшли різні значення швидкостей. Обміркуйте відповіді на наступні питання:
1. Чому таке сталося?
2. Що впливає на швидкість робота EV3?
3. Як можна збільшити швидкість робота?
2.7 Механічні передачі
Зубчасті передачі
Давайте подивимося на кріплення коліс вашого робота. Колесо обертається разом з віссю сервомотора
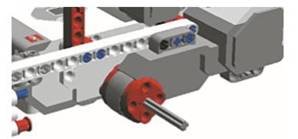
Рис. 15. Кріплення коліс
А тепер давайте використаємо іншу конструкцію.
![]()
Завдання 1
Змініть кріплення коліс до вісі сервомотора, використовуючи схему, зазначену на рис. 16.

Рис. 16. Зубчаста передача
![]()
Вісь сервомотора обертається і за допомогою зубчастих коліс передає обертання коліс нашого робота. Існують різні способи передачі обертання від двигуна до коліс. При цьому ми можемо отримувати обертання коліс і більш повільне – понижаюча передача, і більш швидке в порівнянні зі швидкістю обертання двигуна – підвищующа передача. Є велика кількість різних видів передач, але два основних види – це зубчаста і пасова.
Зубчаста передача – це механізм, до складу якого входять зубчасті колеса, які зчіплюються між собою для передачі обертального руху. Як це відбувається і які при цьому існують закономірності, ви дізнаєтеся, провівши кілька експериментів. Якщо ми будемо мати можливість змінювати зубчасті передачі, то у нашого робота з'явиться коробка перемикання передач.
![]()
Завдання 2
Проведіть дослідження «Вплив різних передач на швидкість руху робота». Для цього, змінюючи комбінації зубчастих коліс (рис. 17), визначте швидкість руху робота і з'ясуйте, які з передач є підвищують, а які знижувальним. Результати записуйте в таблиці 14.
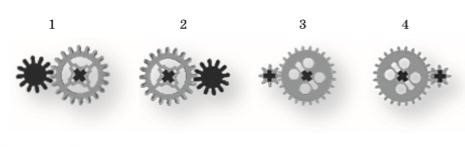
Мал. 17. Приклад комбінації зубчастих коліс
Таблиця 14 Таблиця комбінацій зубчастих передач робота
|
Параметри |
Без передач |
Комбінації зубчатих передач |
|||
|
1 |
2 |
3 |
4 |
||
|
Число зубців на осі мотора |
16 |
12 |
20 |
24 |
8 |
|
Число зубців на осі колеса |
16 |
20 |
12 |
8 |
24 |
|
Відношення |
1:1 |
3:5 |
5:3 |
3:1 |
1:3 |
|
Пройдений шлях (см) |
|
|
|
|
|
|
Час руху (с) |
2 |
2 |
2 |
2 |
2 |
|
Швидкість (см/с) |
|
|
|
|
|
|
Тип передачі |
|
|
|
|
|
Завдання 3
Дайте відповідь на питання.
1. Як змінилася швидкість при перемиканні передачі 1:1 на передачу
3:1?
2. Яке при цьому відношення швидкостей?
3. Як змінилася швидкість при перемиканні передачі зі ставленням 3:1 на передачу 3:5?
4. Яке при цьому відношення швидкостей?
Завдання 4
Сформулюйте вашу гіпотезу про вплив різних передач на швидкість руху робота.
![]()
Ви розібралися, де в таблиці 12 підвищуючі передачі, а де понижаючі; дізналися залежність швидкості руху від відношення числа зубів ведучого колеса до числа зубів веденого колеса (пряма залежність). У зубчастої передачі це відношення називається передавальним числом. У скільки разів змінюється передавальне число, в стільки ж разів змінюється швидкість руху.
Нехай Nведуч – число зубів ведучого колеса, Nведен – число зубів веденого колеса. Тоді математична модель одометра для робота з коробкою перемикання передач буде описуватися формулою
![]() N
N
![]()
360 N
де ![]() – пройдене відстань;
– пройдене відстань; ![]() – число градусів в
налаштуванні блоку Рульове управління (або градуси повороту вісі сервомотора),
– число градусів в
налаштуванні блоку Рульове управління (або градуси повороту вісі сервомотора), ![]() – діаметр
колеса.
– діаметр
колеса.
Якщо передавальне відношення дорівнює 1, то формула прийме знайомий вам вигляд:
![]()
![]()
Завдання 5
Використовуючи різні зубчасті передачі, перевірте, який вантаж зможе зсунути робот. Заповніть таблицю 15.
Таблиця 15
|
Передавальне число |
1:3 |
3:5 |
1:1 |
5:3 |
3:1 |
|
Маса робота (кг) |
|
|
|
|
|
|
Маса причепа (кг) |
|
|
|
|
|
|
Максимальна вага вантажу (кг) |
|
|
|
|
|
|
Загальна маса (кг) |
|
|
|
|
|
Завдання 6
Використовуючи дані із таблиці 13, побудуйте графік.
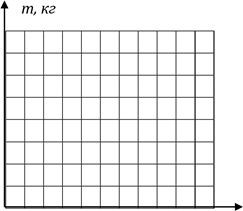
N
![]() – загальна маса системи
(робот, причіп, вантаж);
– загальна маса системи
(робот, причіп, вантаж); ![]() – передавальне число.
– передавальне число.
Завдання 7
Сформулюйте гіпотезу, як впливають різні передачі на вантажопідйомність робота.
Завдання 8
Заповніть пропуски
Золоте правило механіки: у скільки разів виграємо у
____________________, у скільки разів програємо в _____________________.
Завдання 9
Заповніть пропуски
______________________ передача – це механізм, в склад якого входять ___________________ колеса, які щеплюються між собою для передачі ___________________ руху.
![]()
Багатоступенева передача
Зовсім інший результат можна отримати, якщо встановити дві шестерні на одну вісь. Вони будуть обертатись з однаковою швидкістю, але в сукупності ще з двома шестернями дадуть велике збільшення відношення.
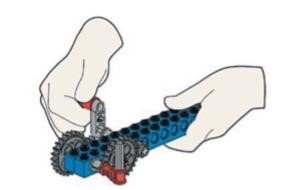
Рис. 18. Багатоступенева передача Така передача називається багатоступенева.
![]()
Завдання 10
Скільки раз тепер потрібно повернути ведучу вісь для одного повороту веденої? Проведіть розрахунок для двох пар шестерень на 8 і 24 зубці.
![]()
Передавальне відношення багатоступеневої передачі дорівнює добутку відношень всіх ступенів. Використовуючи це правило можна побудувати передачу з дуже великим передавальним відношенням, що досягає мільярдів.
Черв’ячна передача
Черв’ячна передача – побудована на основі однієї звичайної шестерні і черв’яка – гвинта зі спеціальною різьбою. В цій парі черв’як завжди є ведучим. Один прохід черв’яка повертає один зубець шестерні. Тому передавальне відношення буде дорівнювати кількості зубців на шестерні.
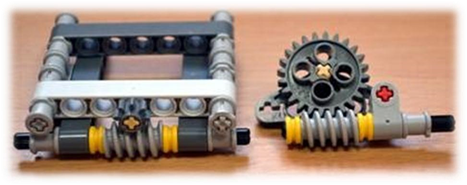
Рис. 19. Черв’ячна передача
Завдання 11
Проведіть розрахунок наступних передавальних відношень, використовуючи шестерні з 8, 24, 40 зубцями:
а) 27:1, б) 45:1 в) 135:1 г) 3:5 д) 5:9
Завдання 12
Проведіть розрахунок наступних передавальних відношень, використовуючи шестерні з 12, 20, 36 зубцями:
а) 9:1, б) 9:5 в) 25:9
Завдання 13
Із всіх шестерень одного конструктора побудуйте механізм на стійкій основі з максимальним передавальним відношенням. Проведіть його розрахунок.
![]()
Пасова передача
Пасову передачу застосовують в механізмах, в яких не потребується постійне передавальне співвідношення, а відстань між осями може бути велика. Наприклад в автомобільному генераторі електричного струму чи в приводі станка.

Рис. 20. Пасова передача
Провідне і ведене колесо називаються шкивами, а з’єднує їх пружний ремінь – пас. Як правило, ремінь поміщається в спеціальний жолоб, щоб уникнути зіскакування. Передача обертання відбувається за рахунок тертя ременя і шківів. При створенні механізму необхідно знати його передавальне відношення. Але як його порахувати для коліс, у яких немає зубчиків?
Передавальне відношення пасової передачі розраховується через відношення діаметрів ведучого і веденого шківів.
![]()
![]()
Завдання 14
Побудуйте пасову передачу з деталей вашого конструктора. В якості ведучого шківа використовуйте малу втулку, в якості веденого – диск вузького колеса. За допомогою лінійки виміряйте діаметр кожного з шківів
(рис. 21). Порахуйте передавальне відношення такої передачі.
![]()

Рис. 21. Вимірювання діаметрів шківів за допомогою лінійки Завдання 15
Побудуйте конструкцію з пасовою передачею, скориставшись верстатом, на якому раніше будувалася зубчаста передача. (рис. 22).
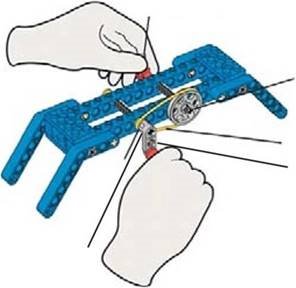
Рис. 22. Побудова пасової передачі
2.8 Тактильні відчуття
Домашні роботи повинні незабаром стати нормою нашого життя. Однак до домашніх андроїдів ще дуже далеко. Проблема на найближчі роки – як створити поверхню, дуже чутливу до дотику, тиску і температурі. Перш за все це питання нашої безпеки: робот, потискуючи руку, повинен «розуміти», що це не металева арматура. На сьогоднішній день з роботів, які існують не в одиничному екземплярі і здатні аналізувати тактильні відчуття, можна відзначити робота компанії Ford.

Рис. 23. Робот тестувальник
Він «займає» місце водія в автомобілі, вимірює тертя, шорсткість, м'якість, температуру на поверхнях салону автомобіля, а потім порівнює з еталонними значеннями. Це дозволяє інженерам зробити комфортніше проектований автомобіль, ґрунтуючись на вимірах робота. Згадаймо, що тільки завдяки датчикам робот може сприймати навколишні впливу – це його органи чуття. Тактильне сприйняття у вашого робота реалізовано поки простим способом: використовується вимикач (рис. 24), що спрацьовує при торканні.
Робота можна запрограмувати на натискання кнопки, її відпускання і клацання по ній.
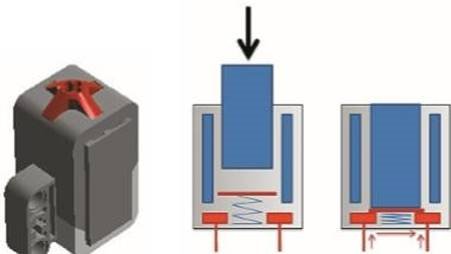
Рис. 24. Датчик дотику і схема його роботи
![]()
Завдання 1
Підключіть до робота два модулі з датчиком дотику. Підключіть датчики до портів 1 і 2.
![]()
Ми розглянемо класичний приклад застосування датчиків дотику в системах автоматичного відкривання / закривання дверей. Спрацював датчик – сервопривід закрив двері.
![]()
Завдання 2
Після натискання на кнопку правий мотор робота має зробити один оборот. Наступне натискання призводить сервомотор до свого попереднього стану. Складіть програму.
Завдання 3
Доповніть програму, щоб друга кнопка аналогічно управляла лівим мотором. При цьому лівий мотор дає один оборот при натисканні на кнопку, а потім сервомотор повертається до свого попереднього стану.
Завдання 4
Ви вже знаєте, що блок Цикл має вбудований лічильник ітерацій, тобто покажчик того, скільки разів виконувалося тіло циклу. Цю можливість треба вміти використовувати. Всім знайома ситуація, коли відвідувач підходить до каси, а у віконці красується оголошення: «Перерва 15 хвилин».
Розглянемо спрощену задачу: нехай касир після обслуговування 10 відвідувачів може взяти технічну паузу на 3 хв.
Напишіть програму, яка виводить на екран кількість спрацьовувань датчика торкання, а після 10 натискань виводить на екран «Close for 3 min» і після 10-секундної паузи знову починає рахувати і т. д.
Завдання 5
Згадайте, що у вас є другий датчик дотику, і напишіть програму, що реалізовує таку задачу: необхідно додатково використовувати датчик дотику, який контролює, чи не вставав касир з робочого місця, коли це не передбачено трудовим розпорядком, і виводить кількість «відходів» касира на екран.
2.9 Світ в кольорі
Колір в житті людини має величезну інформаційним навантаженням. Наприклад, при визначенні якості продуктів харчування однією з характеристик є колір. Якщо перед поїздкою на транспортному засобі дивитися на червоний колір, то це призводить до уповільнення заколисування, а якщо на синій – до прискорення. Колір відіграє важливу роль в емоційній сфері людини. Наукові дослідження показали, що одні кольори викликають позитивні емоції, інші – негативні. Наприклад, зелений колір заспокоює, а червоний – викликає збудження.
Проект «Робот визначає кольори»
Ваш робот за допомогою датчика кольору також має можливість визначати кольору знаходиться поруч об’єкта або поверхні. Для цього в блоці Колір можна налаштувати режими роботи датчика:
ü режим Колір (визначає всього сім кольорів і відсутність кольору);
ü режим Яскравість відбитого кольору (визначає 100 рівнів яскравості відбитого від поверхні світла).
Щоб правильно користуватися такими чудовими можливостями, треба розібратися, як це працює. Спочатку включається фотовипромінювач (у вас в комп’ютерної мишки є схожий). На рисунку 25 він позначений 1.
Промінь світла від нього падає на поверхню 2 і частково відбивається. Далі промінь потрапляє в фотоприймач 3, який вже передає його в керуючий блок робота. Скільки світла відобразить поверхню, а скільки поглине – це залежить від кольору поверхні. У датчику кольору у вашого робота як фото випромінювач застосований триколірний світлодіод (RGB-світлодіод) – це сполучені в одному корпусі світлодіоди червоного, зеленого і синього кольорів.
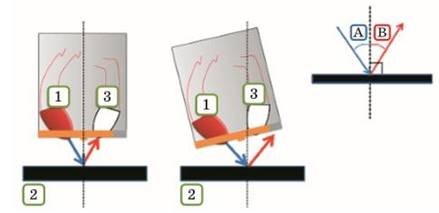
Рис. 25. Робота датчика в режимі визначення кольору поверхні:
1 – фотовипромінювач ; 2 – поверхня; 3 – фотоприймач; A – кут падіння; В – кут відображення
Зверніть увагу, що в режимі Яскравість відбитого світла в якості фотовипромінювача загоряється тільки червоний світлодіод. Датчик кольору визначає яскравість світла, що потрапляє в датчик. Яскравість вимірюється у відсотках від 0 до 100, де 0 – дуже темний, а 100 – дуже яскравий. На рисунку 26 продемонстрована особливість такого сприйняття.
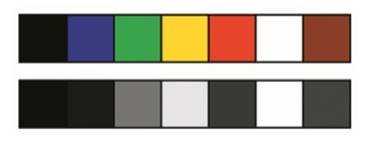
Рис. 26. У режимі Яскравість відбитого світла робот так «побачить» кольору
А в режимі Колір – дуже-дуже швидко по черзі включаються червоний, зелений і синій світлодіоди. Датчик послідовно вимірює відбите світло. Результати цих вимірювань обробляються особливим чином, і за результатами обробки датчик видає код розпізнаного кольору: 0 – немає кольору; 4 – жовтий; 1 – чорний; 5 – червоний; 2 – синій; 6 – білий: 3 – зелений; 7 – коричневий.
Щоб колір поверхні визначався як можна точніше, необхідно: її близьке розташування до датчика (приблизно 1 см), причому розташування строго перпендикулярний. Інакше, як показано на рис. 25, промінь не потрапить на фотоприймач по закону відбиття світла: кут падіння (A) дорівнює куту відбиття (В).
![]()
Завдання 1
Складіть програму, що дозволяє роботу визначати червоний і жовтий кольори, відображати результат на екрані. Проаналізуйте алгоритм роботи програми.
Завдання 2
Складіть програму, що дозволяє роботу визначати сім можливих кольорів.
Завдання 3
Досліджуйте, які кольори робот визначає неправильно. Сформулюйте гіпотези, чому так відбувається.
![]()
Проект «Міняємо освітленість»
Як ми пізнаємо все навколо? Базою для отримання нами даних про досліджувані об'єкти, явища і процеси є спостереження і експеримент. Що таке експеримент? Це слово походить від латинського слова experimentum, що означає «проба», «досвід». Експеримент – це метод дослідження, при якому ми можемо управляти умовами, в яких досліджується об'єкт (або явище, або процес). На основі спостережуваних і вимірюваних даних про об'єкт робляться висновки і висновки. Щоб пояснити спостережувані факти, висуваються гіпотези, які знову перевіряються експериментом. Далі будуються теорії. Це науковий метод пізнання. Це наш метод!
![]()
Завдання 4
Складіть програму, яка буде показувати на екрані показники датчика кольору (рис. 27). Дослідіть, які кольори можна досить точно визначати в режимі Яскравість відбитого світла.
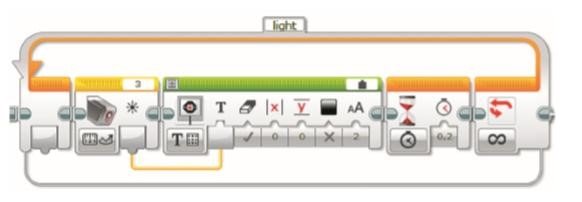
Рис. 27. Програма для визначення яскравості відбитого світла
Завдання 5
Проведіть дослідження «Визначення залежності показань оптичного датчика від умов зовнішнього освітлення» (рис. 28).

Рис. 28. Кольори для дослідження
Завдання 6
Відмітьте на малюнку кут падіння променя світла і кут його відбиття. Доведіть, що в одному із випадків фотоприймач правильно визначає колір, а в другому буде помилка в визначенні кольору поверхні.
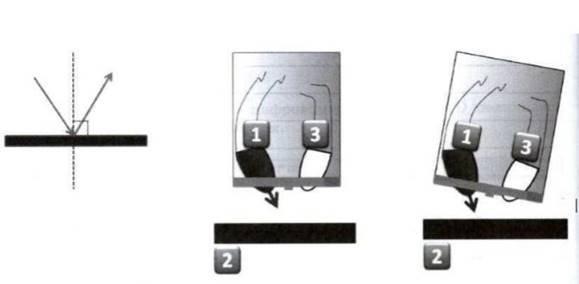
Рис 29. Робота датчика кольору
Завдання 7
Визначте на кожному квадраті значення освітленості (%), яке визначає датчик. Заповніть таблицю 16.

Рис. 30. Кольори для дослідження
Завдання 8
Закрийте на вікнах жалюзі (ввімкніть освітлення). Визначте на кожному квадраті значення освітленості, яке показує датчик. Заповніть таблицю 16.
Таблиця 16
Показники датчика при різній освітленості (%)
|
Колір |
Показники датчика експеримент №1 (Завдання 7) |
Показники датчика експеримент №2 (Завдання 8) |
|
|
|
|
|
|
|
|
51
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Завдання 9
Подивіться на результати, порівняйте їх і запишіть ваші гіпотези.
Завдання 10
Заповніть пропуски
На основі __________________ і _______________ даних про об’єкт робляться _____________________ і ____________________. Щоб пояснити спостереження _____________________________, висуваються ____________________ , які знову перевіряються ____________________. Далі будуються ______________________. Це – ____________________ _________________________ пізнання.
2.10 Визначаємо відстань до об’єкта
Здатність кажана до навігації заснована на використанні передачі звуку. Летюча миша створює і безперервно посилає своїми голосовими органами ультразвукові сигнали. Звук відбивається від виникаючих на шляху предметів. За відбитим сигналами миша визначає характер об'єкта і відстань до нього. Так працює і датчик визначення відстані нашого робота (рис. 31). В одному «оці» у нього джерело ультразвуку, а в іншому – приймач.
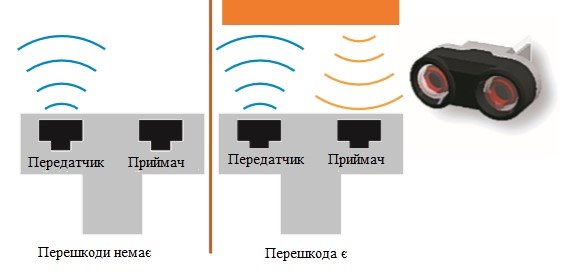
Рис. 31. Схема роботи ультразвукового датчика
![]()
Завдання 1
Вкажіть (визначте експериментально) максимальну відстань, на якому УЗ-датчик може визначати об'єкти. ______________________.
Завдання 2
Вкажіть (визначте експериментально) діапазон відстані, на якому УЗдатчик може впевнено визначати об'єкти. ___________
Завдання 3
Датчик ультразвуку дозволить нам створити модель приладу, що вимірює відстань, – ультразвукового далекоміра.
Робот, використовуючи ультразвуковий датчик, повинен визначати відстань до об'єктів, що проходять повз нього і виводити її на екран. Складіть програму.
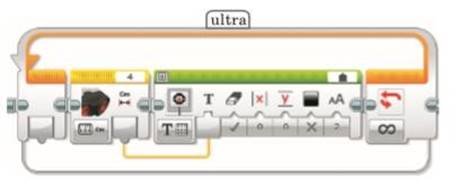
Рис. 32. Програма, яка відображає на екрані знайдену відстань до об'єкта
Завдання 4
Робот повільно крутиться на одному місці. Як тільки в його поле зору потрапляє об'єкт, робот зупиняється. Складіть програму. Проаналізуйте її і зробіть більш цікавою.
Завдання 5
Складіть програму для робота, який тримав би дистанцію 50 см до об'єкта. Проаналізуйте поведінку робота.
Завдання 6
Підрозділ з розвідки доповів про перспективну розробку фірми N: системи дотримання дистанції на громадському транспорті. Вдалося отримати тільки загальну схему роботи. Вам необхідно розібратися і впровадити систему.
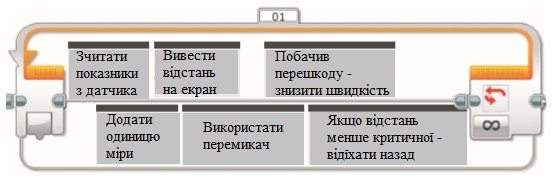
Рис. 33. Схема дотримання дистанції руху
Завдання 7
Створимо прототип охоронної системи. Робот повільно обертається на одному місці (як би дивиться на всі боки). Як тільки проходить порушник, він зупиняється і включає звук сирени. Якщо порушник не йде, робот рухається на порушника, потім повертається.
Завдання 8
Створіть свій прототип охоронної системи. При цьому використовуйте кілька датчиків, можливість робота пересуватися, видавати звуки і відображати інформацію на екрані.
Завдання 9
Робот охороняє територію всередині кола діаметром 1 м (рис. 34). Робот знаходиться в центрі. Якщо в колі виявляється порушник, робот виштовхує його за межі кола і повертається в центр. Складіть програму управління. Використовуйте ультразвуковий датчик.
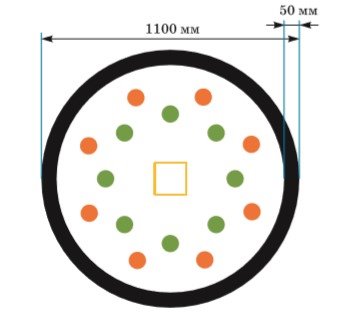
Рис. 34. Охоронна територія
2.11 Приклади завдань для проектної роботи
Завдання для розминки
Завдання №1
Вихідний стан:
Робот знаходиться на ігровому полі. На відстані 100 см від нього в зоні видимості його радарів знаходиться невелика картонна коробка.
Завдання:
Написати програму руху робота вперед до тих пір, поки відстань до коробки не зменшиться до 20 см. Здійснювати повороти роботу не буде потрібно.
Завдання №2
Вихідний стан:
Робот знаходиться на ігровому полі. На відстані 80 см від нього знаходиться невелика картонна коробка. Кут повороту робота щодо коробки довільний.
Завдання:
Написати програму, яка буде повертати робота вправо до тих пір, поки в поле зору його радарів не опиниться коробка. Після зупинки робота лінія його погляду повинна якомога точніше перетинатися з коробкою.
«Знайшовши» коробку робот повинен сказати «Yes».
Завдання №3
Робот повинен розтискати клешні, якщо до його радару на відстань 10 см піднести руку і стискати, якщо рука зникає з поля його зору. Програма повинна працювати рівно 60 секунд.
Завдання №4
Вихідний стан:
На відстані 60 см від робота знаходиться підставка з м'ячиком червоного кольору. Підставка зібрана відповідно до інструкції додається до конструктора Lego Mindstorms. М'ячик знаходиться в полі зору робота, однак, кут повороту робота встановлений неточно. Інших предметів на ігровому полі немає.
Завдання:
Робот повинен під’їхати до м’ячику, взяти його клешнями, розвернутися і повернувшись на початкове місце, розтиснути клешні.
Очікується, що в процесі руху до м’ячику роботу доведеться кілька разів скорегувати свій маршрут.
Завдання №5
Вихідний стан:
На робочому столі лежить карта з білого паперу, на якій намальована товста чорна лінія довільної форми. Товщина лінії не менше 2-3 см.
Завдання:
Написати програму руху робота по чорній лінії. Робот повинен рухатися відстежуючи всі її повороти.
Завдання №6
Вихідний стан:
Робот стоїть на ігровому столі. Перед роботом строго по осі його погляду, але на невідомій відстані, знаходиться картонна коробка. Відстань до коробки від 20 до 150 см.
Завдання:
Робот повинен виміряти відстань до коробки і зберегти свідчення в змінної. Одним безперервним рухом вперед проїхати цю відстань. Дотикатися коробки не потрібно, однак відстань до неї в момент зупинки робота має бути мінімальним.
Задкуючи заднім ходом повернутися назад, орієнтуючись на значення, яке зберігається в пам'яті.
Завдання №7
Вихідний стан:
Робот стоїть на ігровому столі. Так само на столі знаходяться дві однакові картонні коробки. Відстань між коробками не менше 50 см. Робот знаходиться між ним. Відстань від робота до будь-якої коробки від 5 до 100 см, більш точних даних немає.
Завдання:
Робот повинен вказати найближчу до нього коробку, повернувшись до неї і видавши звуковий сигнал.
Проектні завдання
Проект «Сушарка для рук»
Звичайно, ви багато разів користувалися автоматичними сушарками для рук. У них є датчик, який дозволяє вам включати, а потім відключати вентилятор. Придумайте і реалізуйте нову модель. Запрограмуйте сушилку наступним чином: як тільки спрацьовує світловий датчик, включається вентилятор, він відключається через 5 секунд після включення. Перш за все – економія електроенергії! Сушарка повинна вимикатися відразу після того, як від неї прибирають руки. Інакше в цілях економії її просто відключать.
Оформіть звіт про виконану роботу. Проект «Світлофор»
Створіть модель світлофора. У початковому стані горить зелене світло. Пішохід натиснув на кнопку – через 10 з зелений гасне і спалахує помаранчевий. Ще через 3 з гасне помаранчевий і загоряється червоне світло. Червоне світло горить 30 с, після цього спалахує помаранчевий, при цьому червоний не гасне. Через 3 з гаснуть червоний і помаранчевий, загоряється зелений. І повинен бути нічний режим – він переводить вночі світлофор в режим миготливого оранжевого світла.
Проект «Стартова система»
На чемпіонатах з лижних видів спорту є дистанції з роздільним стартом. При цьому спортсмени стартують через інтервали в 30 с.
Запрограмуйте прототип системи.
Проект «Панель приладів»
Ви робили окремо одометр, тахометр і спідометр. Але на автомобілях немає гордо красується самотнього спідометра або тахометра. Є приладова панель: на ній всі свідчення. Спробуйте зібрати все воєдино. Напишіть звіт про виконану роботу.
Проект «Слухняний домашній помічник»
Робот-помічник – мрія! Уявіть, що вона прямо зараз стала реальністю. Через тиждень ви скажете йому: «Не ходи сюди, це моя кімната». Нехай робот ходить тільки там, де ви йому вкажете. Робот повинен самостійно шукати чорну лінію і рухатися тільки вздовж неї. Створіть таку модель.
Напишіть звіт про виконану роботу.
Проект «Робот-газонокосильщик»
Хто повинен підстригати галявини? Роботи! Вам потрібно повідомити робота, як об'їжджати перешкоди і де знаходяться межі галявини. Складіть для нього програму. Після цього ви зможете довірити роботу це важке заняття.
Проект «Робот-футболіст»
Ви вже чули про чемпіонат світу з футболу для роботів. Щороку він проходить в новій країні. В першу чергу ви повинні навчити робота впізнавати м'яч і виконувати удар. Потім робота потрібно навчити виконувати штрафний удар. Встановіть м'яч в штрафній точці, а самого робота – в початок штрафного майданчика. Після запуску програми він повинен виконати розбіг і відразу після виявлення м'яча нанести удар по воротах. Далі робот повинен зупинитися і розвернутися. Робот може вільно переміщається по стадіону, обмеженому чорної лінією. Якщо він знаходить м'яч, він виконує удар (якщо можливо, по воротах). Напишіть звіт про виконану роботу.
Проект «Робот-навантажувач»
Роботи потрібні скрізь, де потрібно переміщати вантажі з пункту А в пункт В (а це – логістика). Ви можете створити модель такої системи з допомогою робота-навантажувача, який безперервно повторює послідовність операцій так само, як і автоматична складальна лінія. Складіть алгоритми для функцій піднесення і опускання. Під час руху вила навантажувача повинні знаходитися в проміжному положенні. Придумайте маршрут. Завдання полягає в наступному: стартувати з вихідної позиції, підняти піддон, який знаходиться в точці А, перенести його за маршрутом в точку B і потім опустити. Після повернення в вихідну позицію робот повинен робити невелику паузу.
Проект «Креслярська машина»
Придумайте, як прикріпити олівець до робота-навантажувача замість підйомної платформи, а потім запустити на чистий аркуш паперу. Піднімаючи і опускаючи олівець під час руху, робот зможе малювати на папері різні фігури. Таким чином, ви переробите його в креслярську машину.
Проект «Збір космічного сміття»
Хочете Нобелівську премію? З кожним роком на орбіті Землі стає все більше і більше сміття – це уламки супутників і ракетних прискорювачів, а також вийшли з ладу космічні апарати. Одного разу настане момент, коли сміття стане занадто багато і доведеться від нього позбавлятися, інакше не вдасться запустити жодного супутника. Швидкість руху уламків іноді досягає 10 км/с, і навіть найдрібніший уламок діаметром 1 мм може пробити обшивку космічного корабля.
На сьогоднішній день поки немає коштів і систем для видалення космічного сміття з навколоземного простору.
Число відслідковуються (розміром більше 10 см) об'єктів штучного походження на навколоземній орбіті сягає більше 16 тис.
Космічне сміття вже визнане осново небезпечним фактором при польотах в космос. Придумайте, як вирішити проблему за допомогою роботів. Складіть план, визначте завдання проекту і способи їх вирішення.
Оформіть результати у вигляді звіту.
Проект «Розмінування»
Роботи-сапери є на озброєнні армій і в арсеналі спецслужб всіх найбільших світових держав. Але поки вони не автоматичні, ними керують люди з безпечної відстані, використовуючи монітори і встановлені на роботах відеокамери.
У точці 2 закладено вибухівку. Ваш робот – в укритті (точка 1).
Необхідно:
ü повідомити про початок місії;
ü під'їхати до точки 2 (доторкатися до вибухівки не можна);
ü повідомити про готовність до розмінування;
ü розміновувати (в нашому випадку – почекати 5 с);
ü від'їхати назад і розвернутися на 180 ;
ü повернутися на базу;
ü доповісти про виконання завдання.
Візьміть ізоляційну стрічку і на вказаній відстані приклейте дві смужки: «База» і «Місце розмінування».

Рис. 35. Приклад замінування
Проект «Парковка»
Насправді поки таких парковок дуже мало. Причина проста: поки немає автомобілів з програмами автоматичного паркування та з можливістю завантаження програм автоматичного управління (хоча ситуація поступово змінюється). А раз немає автомобілів, то немає і парковок. Але наш робот вміє виконувати завантажені в нього програми. Вам належить написати програму автоматичного паркування автомобіля в гаражний-бокс майбутнього
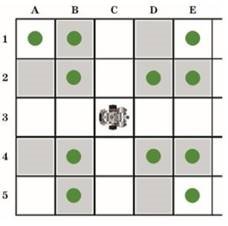
Рис. 36. Приклад паркування
Робот знаходиться в осередку C3. Місця для можливих парковок: А1, Е1, А5, Е5. Три з можливих місць паркування вже зайняті.
Для виконання цього завдання зручно використовувати датчик ультразвуку, який дозволить визначити, чи зайнятий бокс. Постарайтеся розглянути всі можливі випадки розташування об'єктів в осередках. Робіть це послідовно. Наприклад, можливі варіанти для кута А1 схеми наведені на рис.
37.
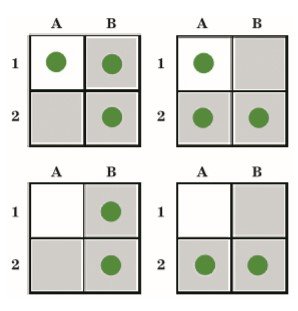
Рис. 37. Фрагмент паркування
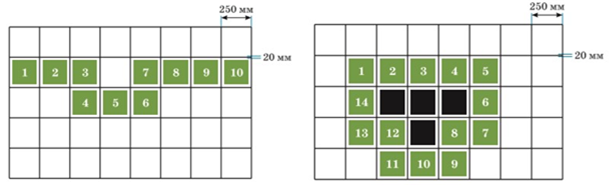
Складіть програму для повного виконання проекту «Парковка» (робот послідовно повинен бути в боксах А3, С1, Е3, С5 і відпрацювати всі варіанти розташування об'єктів).
РОЗДІЛ 3. ПІДСУМКИ РОБОТИ
3.1 Підготовка до FLL. Наш робот Коала
Наша команда BrainsON довго працювала над створенням чогось неповторного. А так як ми взялися за цю справу вперше, то на фестиваль з нами поїхала не перша і навіть не 50 модель нашого робота. Ми вчилися на помилках і починали знову. Були і розчарування, але команда йшла до своєї спільної цілі.
Скільки всього було, що не перерахувати: то робот малий, то великий, то важкий, то повільний то замало потужності в маніпуляторах, то не повертає так, як планувалось, то не всі датчики встановили і т.д.
Для того, щоб за менший проміжок часу встигнути розглянути більше варіантів ми складали не одного робота. Одночасно учасники команди працювали над кількома моделями. Тестували, перевіряли на міцність та надійність, ділилися результати. Врахувавши попередні помилки починали спочатку. Найвдаліші екземпляри залишали до тих пір доки не виходило краще.
І от коли всі попередні помилки були враховані на світ народилася Коала (рис. 35). Таке з першого погляду дивне ім’я має наш робот.
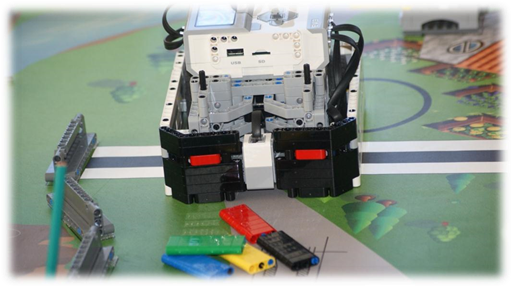
Рис. 38. Наш Коала
Несподівано для нас він видався досить схожим на цю тварину, великий ніс, маленькі очі, велика, широка голова із сплющеною мордочкою.
А ще нашого робота спонукають до дії леговські евкаліптові листочки. Ми всі знаємо, що коала харчується евкаліптом що і дає їй заряд енергії. Нам теж вдалося створити, щось подібне. Наш робот запускає місії відповідно до кольору листочка, який зчитує датчик кольору. Всього таких місій 13.
Стратегії вибору місій теж мінялися не раз. Все починалося з місії Потік. Тому що ця місія надає бали не лише нам, а й команді за сусіднім столом. Потім з’явилась ідея об’єднати місії які поряд з Потоком в один блок та виконати їх за один заїзд. Місія виявилася не з простих. Проте по завершенню роботи над блоком результат виконання був практично 100%, що і надихнуло нашу команду на подальшу роботу.
Далі робота кипіла за принципом віддаленості місій від бази. Фонтан, вилучення та заміна труби, штатив, кран, рогатка, квітка, очисна споруда, криниця. За браком часу місії знову об’єднувалися у блоки, знову перероблялися маніпулятори, перепрограмовувався робот, місії мінялися місцями і так здавалось до нескінченності, але як виявилось час обмежений тому на 13 місіях за чотири заїзди ми зупинились, хоча було величезне бажання виконати всі і є ідеї для подальших досягнень.
Якщо розглядати анатомію Коали, то першим бар’єром , який виник були колеса зі стандартних наборів Mindstorm EV3 Education, як виявилося під час їзди диски прокручуються, а шини стоять на місці, в результаті чого колеса крутяться, а робот стоїть.
Було прийняте рішення використати інші. Зупинилися на колесах
62,4*20.
Третьою опорою стало маленьке колесо без шини, та з нею робот під вагою маніпулятора перевертався на бік. Для більшої надійності попереду встановили два колеса-опори поряд діаметром 10 мм. Для точнішого повороту колеса є вершини рівностороннього трикутника.
В рух робота приводять два великі сервомотори, вони відповідають за переміщення в просторі. Але і тут нас чекали несподіванки – при програмуванні моторів зеленими блоками робот їде, але не в задану точку. Мотори при однаковій потужності обертаються по різному. З цим вирішили боротися програмно.
Для роботи маніпуляторів були використані два середні сервомотори.
Але потужності середнього сервомотора не вистачає, щоб підняти трубу. Якщо використати ще два великі сервомотори зростає вага і розмір самого робота. Рішенням стала черв’ячна передача, яка збільшує потужність сервомотора в 12 разів. Всього робот має чотири змінні маніпулятори, один з маніпуляторів складається з двох частин. Із шестерень на роботі обертальний момент передається на шестерню маніпулятора, яка в свою чергу приводить в дію рухомий елемент маніпулятора. Заміна маніпулятора відбувається дуже швидко. Достатньо лише зняти один, покласти на його місце інший і робот готовий до роботи. Маніпулятори зроблені міцними, щоб не підвели в останній момент.
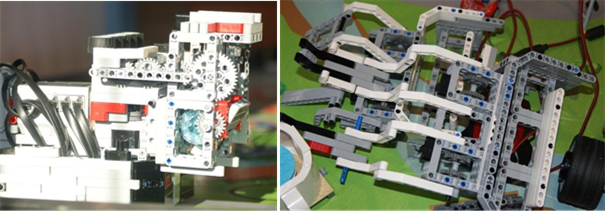
Рис. 38. Маніпулятори
Коала має три датчики. Гіродатчик – для точної орієнтації у просторі. Рух прямо та повороти. Датчкик кольору – для запуску програм місій.
Однією з головних деталей робота є борти-стінки, щоб сховати дроти та при старті калібрувати робота від борта стола.
Над всіма елементами знаходиться мікропроцесорний блок. Всі порти для зручності відкриті і в повному доступі. І в разі відмови датчика його легко можна перепідключити.
При програмуванні було найбільше підводного каміння. Для зручності було вирішено програмувати власні блоки. Ними стали: рух вперед, рух назад, вправо і вліво, всі блоки використовують гіродатчик, який повертає робота за заданим кутом. Їде робот визначену відстань в сантиметрах. Для руху вперед і назад використовуються сині блоки, які отримують в опрацювання лише потужність і довжину дистанції в сантиметрах. В залежності від того, який мотор рухається швидше він призупиняється, а інший прискорюється. Таким чином робот вирівнюється.
Також у власні блоки поміщено об’єднані програми місії. В основній програмі міститься лише розгалуження з чотирма вітками, відповідно до зчитаного кольору програма обирає відповідний блок місій для виконання.
Маніпулятори приводяться в рух зеленими блоками. Вказується потужність та кількість обертів.
В цілому конструкція робота є вдалою та цілком піддається керуванню. Для нашої команди він найкращий, адже ми вклали в нього всі свої знання і старання. КОАЛА тепер частина нашої команди.
3.2 Досвід – син помилок важких
Згадайте ваші дослідження і експерименти з роботом. У вас вже накопичився достатній досвід для того, щоб оцінити точність вашого робота. Спробуємо відзначити найбільш важливі особливості, які необхідно враховувати при роботі з роботом.
1. Робот ніколи не їде прямо, якщо йому просто дати таку команду.
2. Помилки завжди накопичуються.
3. Не існує двох однакових об'єктів, навіть якщо це штамповані на заводі шини.
4. На роботу датчиків завжди впливають перешкоди та зовнішнє середовище, в результаті в їх роботі завжди будуть випадкові помилки.
5. У робота є маса, значить, є і деформація коліс, і інерція при гальмуванні.
6. Не можна виставляти при старті велику швидкість, обов'язково буде пробуксовка коліс.
7. Заряд акумулятора впливає на роботу робота.
![]()
Завдання 1
Доповніть список ваших спостережень до 20 пунктів.
СПИСОК ВИКОРИСТАНИХ ДЖЕРЕЛ
1. Кривонос О.М. Робототехніка в школі / О. М. Кривонос // Теорія і практика використання інформаційних технологій в навчальному процесі. – К. : Вид-во НПУ імені М.П. Драгоманова, 2017. – С. 90-91.
2. Филиппов С.А. Робототехника для детей и родителей / С. А. Филиппов – СПб.: Наука, 2013. – С. 11.
3. Лазарев М. В. О связи робототехники с механикой, электроникой и программированием, а также о междисциплинарных связях / М. В. Лазарев // Вестник ТГПУ (TSPU Bulletin). 11 (139), 2013. – С.132-136.
4. Вегнер К.А. Внедрение основ робототехники в современной школе / К.А.Вегнер // Вестник новгородского государственного университета №74 Т.2, 2013, С. 17-19
5. Филиппов С.А. Робототехника для детей и родителей. – СПб.:
Наука, 2013. 319 с.
6. Копосов Д.Г. Начала инженерного образования в школе. STEMобразование. Выпуск 1.
7. Технология. 5–8 классы: методическое пособие / С.А. Бешенков.
8. Mark Rollins Beginning LEGO MINDSTORMS EV3 source code online discover all you can do with the new ev3 programmable brick, motors, and sensors, 2017.
9. The LEGO MINDSTORMS® EV3 IdeaBook. Copyright©2015 by
Yoshihito Isogawa, 2016
10. http://lbz.ru/metodist/authors/techologia/1/
Додаток 1
ПРАВИЛА РОБОТИ
|
Збільшення ваги – обтяжливо і для вас, і для робота. |
Додавання деталей завжди ![]() приводить
до зниження
приводить
до зниження
швидкості робота.
|
Різкі рухи – це недолік вашого робота. |
Не вмикайте
максимальну ![]() потужність моторів без
потужність моторів без
особливої потреби!
|
|
|
Захищайте робота від брудного зовнішнього середовища.
|
|
|
Завжди перевіряйте рівень заряду батареї.
|
Якщо робот нічого не робить, то й енергію він використовувати не повинен. |
![]() Не
забувайте виключати вашого робота!
Не
забувайте виключати вашого робота!
|
Вам було б приємно, якби вам видалили зуб без обезболювання? |
Всі підключення датчиків і ![]() моторів
тільки у виключеному стані робота!
моторів
тільки у виключеному стані робота!
|
Уявіть, що це робот змушує вас виконувати програму а не навпаки |
Чим пізніше ви
знайдете ![]() помилку,
тим більше часу піде на її виправлення!
помилку,
тим більше часу піде на її виправлення!
Додаток 2
ІНСТРУКЦІЯ «РОБОТ П’ЯТИХВИЛИНКА »
-

-
Щиро вдячна за цікаву і корисну розробку. Дякую

про публікацію авторської розробки
Додати розробку