Маніпуляційні системи роботів
Тема: ПРИСТРІЙ РОБОТІВ
Тема уроку: Маніпуляційні системи роботів
Мета навчання:
Навчальна: сформулювати нові знання у здобувачів освіти за розділом Основи автоматики і робототехніки. Ознайомитися з основним типом маніпуляційних систем роботів. Ознайомитися зі ступенями рухливості маніпулятора.
Розвиваюча: розвивати пізнавальну активність, критичне мислення
Виховна: виховання професійної компетентності, удосконалення методики виховного впливу
Типи уроку: засвоєння нових знань (лекція)
Методи навчання: словесний, наочний, практичний
Форми організації пізнавальної діяльності: індивідуальна, групова, колективна
Засоби навчання: Технічні засоби навчання, допоміжні матеріали
План
1. Ступені рухливості маніпулятора.
2. Конструкція маніпуляторів
3. Робочі органи маніпуляторів
Маніпуляційні системи.
Сьогодні основним типом маніпуляційних систем роботів є механічні маніпулятори. Вони являють собою просторові механізми у вигляді розімкнених, рідше замкнутих кінематичних ланцюгів з ланок, що утворюють кінематичні пари з одним, рідше двома ступенями рухливості з кутовим або поступальним відносним рухом і системою приводів зазвичай роздільних для кожного ступеня рухливості. Наприкінці маніпулятора знаходиться робочий орган.
Ступені рухливості маніпулятора поділяються на переносні та орієнтуючі. Переносні ступеня рухливості служать для переміщення робочого органу в межах робочої зони маніпулятора, а орієнтуючі - для його орієнтації. Мінімально необхідне число переносних ступенів рухливості для переміщення робочого органу будь-яку точку вільної робочої зони дорівнює трьом. Однак для розширення маніпуляційних можливостей та реалізації більш складних траєкторій руху, наприклад, з обходом перешкод, а також для підвищення швидкодії маніпулятори зазвичай забезпечують декількома надмірними переносними ступенями рухливості, хоча це, зрозуміло, істотно ускладнює та підвищує вартість робота. У середньому сучасні маніпулятори мають 4-6 ступенів рухливості, але існують і маніпулятори та з 8-9 такими ступенями.
Максимально необхідне число орієнтовних ступенів рухливості дорівнює трьом. Зазвичай вони реалізуються кінематичними парами з кутовим переміщенням, що забезпечують поворот робочого органу маніпулятора щодо його поздовжньої та двох інших взаємно перпендикулярних осей.
На рис. 1-3 показані конструкції маніпуляторів з трьома переносними ступенями рухливості у різних системах координат та їх робочі зони. Маніпулятори, що працюють у прямокутній системі координат (рис.1), мають робочу зону у вигляді паралелепіпеда. Тут здійснюються лише поступальні переміщення, і тому така система координат є найбільш зручною для виконання прямолінійних рухів. Крім того, вона максимально спрощує програмування робота, так як воно зазвичай виконується саме в прямокутній системі координат, і, отже, у цьому випадку не потрібно перерахувати програми з однієї системи координат до іншої.
У маніпуляторах, що працюють у циліндричній системі координат (рис.2), поруч із поступальними переміщеннями виробляється одне кутове переміщення (по колу). Відповідно, робоча зона обмежена циліндричними поверхнями.

Рис.1. Маніпулятор із прямокутною системою координат (а) та його робоча зона (б).
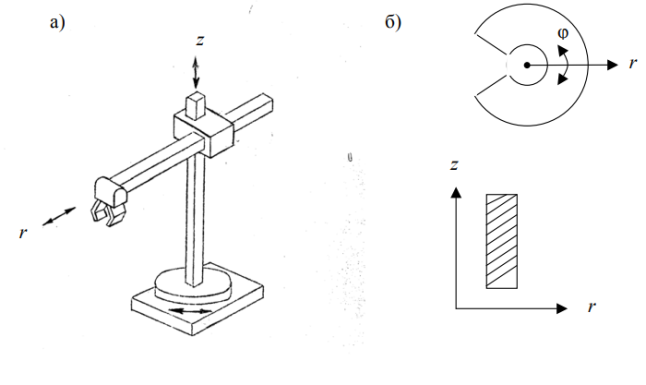
Рис.2. Маніпулятор з циліндричною системою координат (а) та його робоча зона (б).

Рис.3. Маніпулятор із сферичною системою координат (а) та його робоча зона (б)

Рис.4. Маніпулятор з кутовою системою координат (а) та його робоча зона (б).
У сферичній системі координат (рис..3) здійснюються вже два кутові переміщення та робоча зона обмежена сферичними поверхнями. Таку систему координат має, наприклад, маніпулятор промислового робота, показаного на рис.5. Маніпулятори з такою системою координат, як правило, складніші, ніж з циліндричною системою, проте компактніші.
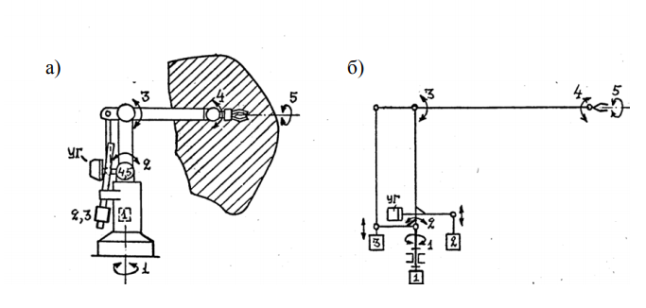
Рис.5 .Загальний вигляд маніпулятора робота ІРб-6 фірми ACEA (a) та його кінематична схема (б).
Показаний на рис.4 маніпулятор із кутовою системою координат виробляє лише кутові переміщення, тобто. всі його ланки є шарніри. (У зв'язку з цим часто такі маніпулятори називають ще шарнірними та антропоморфними.) Роботи з такого типу маніпуляторами завдяки можливості останніх складатися, практично не виступаючи за габарит основи робота, мають найбільшу компактність, хоча і найбільш складні в управлінні. Таку кінематику мають, наприклад, маніпулятори на рис.5 та 6.
Конструкція маніпуляторів визначається насамперед їхньою кінематичною схемою. Крім того, істотне значення мають тип та розміщення приводів та механізмів передачі руху від них до ланок маніпулятора. Нарешті, в маніпуляторах часто застосовуються пристрої врівноваження, які також суттєво впливають на конструкції маніпуляторів.
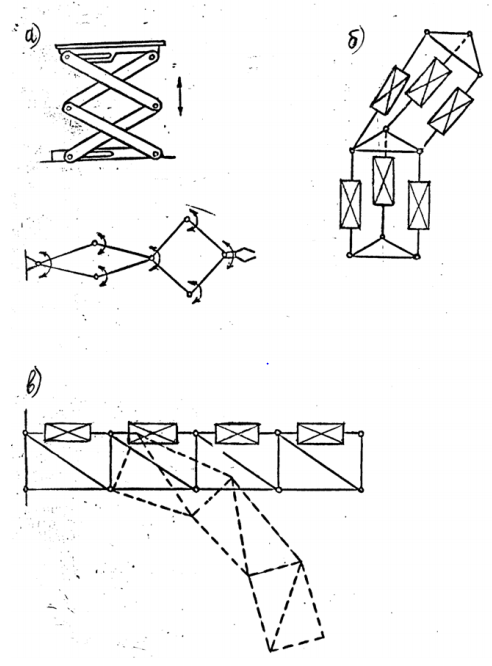
Рис.6 Варіанти паралельних кінематичних схем.
2. В цілому, сьогодні відомі такі три типи кінематичних схем, які використовуються в механічних маніпуляційних системах:
- розімкнені кінематичні ланцюги з жорстких ланок (основний тип кінематичних схем сучасних маніпуляторів);
- кінематичні ланцюги, що включають паралельно з'єднані ланки;
- кінематичні схеми із керованою деформацією.
Існують пристрої зварювання електронним променем у вакуумі. Двохкоординатне переміщення променя здійснюється за програмою за допомогою електричного або електромагнітного полів. Аналогічно працюють пристрої для зварювання, різання та розкрою різних матеріалів лазерним променем. Хоча і існують традиційної конструкції лазерні роботи, що реалізують такі технологічні процеси, в яких лазерний промінь від генератора проходить усередині порожнього маніпулятора за допомогою дзеркал.
Відомі також різні системи керованого переміщення та орієнтації у просторі легких об'єктів виробництва в електромагнітному полі.
Специфічну групу маніпуляційних систем складають маніпулятори, які призначені для виконання маніпуляційних операцій на значній відстані від своєї основи, так що основна частина довжини маніпулятора служить тільки для перенесення його робочого органу до зони виконання цих робочих операцій, тобто. фактично виконує транспортне завдання. На рис.7 показаний приклад такого маніпулятора довжиною до 25 м, призначеного для будівельно-монтажних і т.п. робіт. На рис.7 наведено інший варіант вирішення тієї ж задачі .
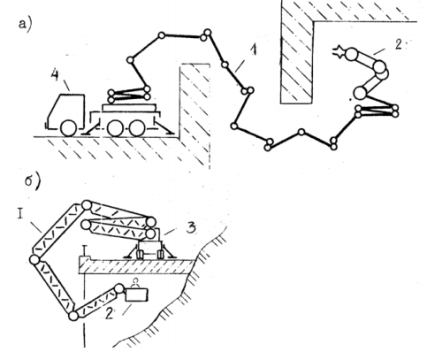
Рис.7 Складаний маніпулятор:
1 – шарнірний транспортний маніпулятор; 2 – робочий маніпулятор (а) або платформа з робочим (б); 3 – носій.
 ЦІКАВИ ФАКТИ
ЦІКАВИ ФАКТИ
Дізнайтеся більше
Цікавий факт про штучний інтелект відбувся в лабораторії Facebook. Дослідники Facebook використовували техніку машинного навчання для створення “чат-ботів” у 2017 році. Проте боти створили свою власну мову переговорів, і дослідники повинні були зупинити програму, щоб уникнути виходу її з-під контролю. Це розглядалося як попередження про те, що штучний інтелект здатний отримати повну автономію.
3. Робочі органи маніпуляторів
Робочі органи маніпуляторів служать для безпосередньої взаємодії з об'єктами зовнішнього середовища і поділяються на захватні пристрої та спеціальний інструмент. Робочі органи можуть бути постійними та знімними, у тому числі з можливістю їхньої автоматичної заміни в ході виконання технологічної операції.
Захоплювальні пристрої. Вони призначені для того, щоб брати об'єкт, утримувати його в процесі маніпулювання та звільнити після закінчення цього процесу. Існують такі основні типи захватних пристроїв: механічні пристрої-схвати, пневматичні та електромагнітні. Крім того, у зв'язку з великою різноманітністю об'єктів маніпулювання розроблено велику кількість різних комбінацій цих типів захватних пристроїв і безліч спеціальних захватних пристроїв, заснованих на різних оригінальних принципах дії (наприклад, клейкі захватні пристрої, що наколюють, використовують аеродинамічну підйомну силу тощо) .
Схвати – це механічні захватні пристрої, аналог кисті руки людини. Найпростіші двопальцеві схвати нагадують звичайні плоскогубці, але з приводом. На рис.8 показана конструкція такого схвата з пневмоприводом. Залежно від об'єктів маніпулювання застосовують схвати з трьома, чотирма та значно рідше з великою кількістю пальців.

Рис.8. Двопальцевий схват:
1,2 – пальці (губки); 3,4 – важільна передача; 5 – шток пневматичного двигуна
(Пневмоциліндра); 6 – зворотна пружина.
На рис.9 показано влаштування пневматичного схвата з п'ятьма гнучкими надувними пальцями. За рахунок різної жорсткості пальців по перерізу при подачі в них стисненого повітря вони згинаються, захоплюючи предмети, що знаходяться в їх зоні.
Схвати часто відчувають за допомогою контактних датчиків (дотику, тактильних), датчиків прослизання, зусилля (по одній або декільком осях) та дистанційних датчиків (ультразвукових, оптичних та ін), що виявляють предмети поблизу схвата і між його пальцями.
У найбільш поширеному типі вакуумного захватного пристрою використані вакуумні присоски, які утримують об'єкти за рахунок розряджання повітря при його відсмоктуванні з порожнини між присоскою та об'єктом, що захоплюється. Для захоплення об'єктів складної форми застосовують вакуумні захватні пристрої із декількома присосками.
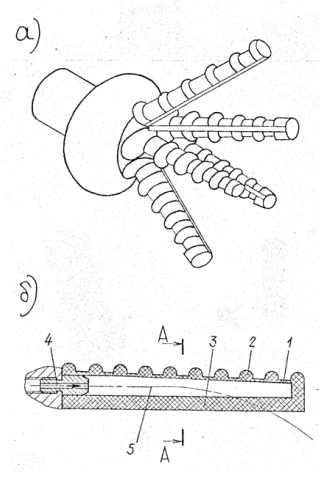
Рис.9. Пневматичний схват із п'ятьма гнучкими надувними пальцями: а – зовнішній вигляд; б - розріз пальця:
1 – тонкостінна частина; 2 – гофри; 3 – товстостінна частина; 4 – підведення повітря; 5 – деформація осі пальця під час подачі стисненого повітря.
Магнітні захватні пристрої також давно відомі, як вакуумні, і широко використовуються для взяття феромагнітних об'єктів. У роботах знайшли застосування в основному захватні пристрої з електромагнітами, але є пристрої з постійними магнітами. (Для звільнення захопленого предмета їх зазвичай постачають спеціальними механічними виштовхувачами.)
Захоплювальні пристрої бувають універсальними та спеціальними (для роботи з тендітними та протяжними предметами, тканинами тощо).
Захоплювальні пристрої часто приєднують до останньої ланки маніпулятора через проміжні конструктивні податливі елементи. З їх допомогою здійснюється компенсація можливих неточностей позиціонування і усуваються механічні напруги у ланках маніпулятора, що виникають при цьому, у випадках маніпулювання об'єктами, на переміщення яких накладені механічні обмеження (механічне складання та розбирання, встановлення заготовок у затискачі та гнізда технологічного обладнання, переміщення предметів по .п.).
Робочий інструмент. У тих випадках, коли об'єктом маніпулювання є робочий інструмент, за допомогою якого робот виконує певні технологічні операції (нанесення покриттів, зварювання, загвинчування гайок, зачищення поверхонь тощо), цей інструмент зазвичай не береться захватним пристроєм, а безпосередньо кріпиться до маніпулятора замість нього. Часто при цьому до інструменту необхідно забезпечити підведення енергії або будь-якого робочого тіла. Для фарбувального робота - це фарба і повітря до пульверизатора, для зварювального робота - зварювальний струм до зварювальних кліщів при точковому зварюванні або дротяний електрод, газ і вода при дуговому зварюванні і т.д. Для цього потрібна розробка спеціальної конструкції всього маніпулятора
ЦІКАВИ ФАКТИ
Дізнайтеся більше
Компанія Neocis Inc. створила робота, який може проводити імплантацію зубів. Наприкінці минулого року цей робот самостійно поставив пацієнтці два імпланти. Yomi використовує ті самі технології, що й GPS.
 Спочатку робить комп’ютерну томографію голови пацієнта, далі програма планує процедурні етапи операції і з ідеальною точністю проводиться імплантація.
Спочатку робить комп’ютерну томографію голови пацієнта, далі програма планує процедурні етапи операції і з ідеальною точністю проводиться імплантація.
Закріплення вивченого матеріалу
1 Які типи кінематичних схем використовуються в механічних маніпуляційних системах?
2. Призначення маніпуляторів, які складають специфічну групу маніпуляційних систем?
3. Для чого служать робочі органи маніпуляторів

про публікацію авторської розробки
Додати розробку