Момент сил відносно точки

Момент сили відносно точки. Зведення довільної системи сил до центру. Головний вектор і головний момент. Три форми рівнянь рівноваги.
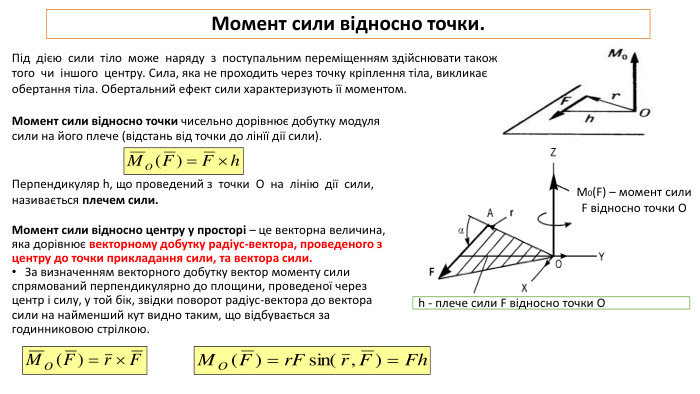
Момент сили відносно точки. Під дією сили тіло може наряду з поступальним переміщенням здійснювати також обертання навколо того чи іншого центру. Сила, яка не проходить через точку кріплення тіла, викликає обертання тіла. Обертальний ефект сили характеризують її моментом. Момент сили відносно точки чисельно дорівнює добутку модулясили на його плече (відстань від точки до лінїї дії сили). Перпендикуляр h, що проведений з точки О на лінію дії сили, називається плечем сили. Момент сили відносно центру у просторі – це векторна величина, яка дорівнює векторному добутку радіус-вектора, проведеного з центру до точки прикладання сили, та вектора сили. За визначенням векторного добутку вектор моменту сили спрямований перпендикулярно до площини, проведеної через центр і силу, у той бік, звідки поворот радіус-вектора до векторасили на найменший кут видно таким, що відбувається за годинниковою стрілкою.h - плече сили F відносно точки ОМ0(F) – момент сили F відносно точки О

Момент сили відносно точки.

Приведення плоскої довільної системи сил до заданого центру – вибираємо довільну точку на площині і кожну з сил переносимо в цю точку. Замість вихідної довільної системи отримаємо схожу систему сил. Для визначення алгебраїчного моменту сили відносно точки треба виконати такі дії: 1) провести лінію дії сили; 2) з вибраної точки опустити перпендикуляр до лінії дії сили (довжина перпендикуляра h – плече сили); 3) скласти добуток плеча на модуль сили; 4) взяти знак “+”, якщо сила намагається повернути плече відносно вибраної точки проти ходу стрілки годинника і знак “-“ – за ходом стрілки годинника . Зведення довільної системи сил до центру.

Теорема Варіньона: Момент рівнодійної збіжної системи сил відносно довільного центра дорівнює векторній (геометричній) сумі моментів складових сил відносно того самого центра.: Зведення довільної системи сил до центру. Якщо сили і точка O розміщені в одній площині, то вектори, що зображують їх моменти перпендикулярні до цієї площини. Тому момент рівнодійної плоскої збіжної системи сил відносно точки, що лежить в площині з силами дорівнює алгебраїчній сумі моментів складових сил відносно цієї точки.

Головний вектор і головний момент. Нехай на тверде тіло діють сили F1, F2, F3, що лежать в одній площині. Візьмемо в цій площині будь-яку точку О, яку назвемо центром зведення, і на підставі доведеної вище теореми перенесемо всі сили в центр О, добавивши при цьому систему трьох пар сил. Моменти цих пар дорівнюють моментам сил F1, F2, F3 відносно центра зведення О. Додаючи сили F1, F2, F3 за правилом багатокутника, дістанемо їх рівнодійну R’, що дорівнює геометричній сумі сил. Геометричну суму всіх сил системи називають головним вектором системи сил. Модуль і напрямок головного вектора не залежать від центра зведення. Модуль і напрямок головного вектора плоскої системи сил визначається так само, як і для рівнодійної системи збіжних сил: Плоска система пар еквівалентна одній парі, момент якої дорівнює алгебраїчній сумі моментів цих пар. Цю пару з моментом М називають головним моментом заданої системи сил.

Три форми рівнянь рівноваги. 1. Для рівноваги плоскої системи сил, що діють на тверде тіло, необхідно і достатньо, щоб сума проекцій цих сил на кожну з двох прямокутних осей координат, розташованих в площині дії сил, були рівними нулю і сума алгебраїчних моментів сил відносно будь-якої точки, що знаходиться у площині дії сил, також дорівнювала нулеві.2. Для рівноваги плоскої системи сил необхідно і достатньо, щоб сума моментів усіх цих сил відносно будь-яких двох точок А і В і сума їх проекцій на вісь Ох, не перпендикулярну до прямій АВ були рівні нулю, тобто: 3. Для рівноваги довільної плоскої системи сил необхідно і достатньо, щоб суми моментів усіх цих сил відносно будь-яких трьох точок А, В, С, що не лежать на одній прямій, дорівнювали нулю:

про публікацію авторської розробки
Додати розробку