робочий зошит для індивідуальної роботи з дисципліни "Технічна механіка" модуль "Статика"

Самостійні роботи Технічна механіка. Статика
МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
Дніпровський транспортно-економічний фаховий коледж
циклова комісія «Транспорту»
Робочий зошит
для індивідуальної роботи
з дисципліни “Технічна механіка” модуль «Статика»
галузь знань 27 «Транспорт» (Тгаnsрогt sегvісеs)
спеціальність 274 «Автомобільний транспорт»
(Моtог vеhісlе tгаnsрогt)
спеціалізація 274.01 «Обслуговування та ремонт автомобілів і двигунів»
відділення «Транспортне»
укладено викладачем вищої категорії:
__________________Катериною АРНАУТ
Розглянуто на засіданні циклової комісії «Транспорту»
Протокол № ___ від «___» _______2021 р.
Голова ЦК _________Михайло ЯРМОШЕНКО
2021
Зміст
Тема: Геометричний метод складання сил, прикладених в одну точку
Тема: «Умови рівноваги плоскої системи збіжних сил»
Тема: Дослідження рівноваги плоскої системи збіжних сил
Критерії оцінювання здобувач освітиів
Анотація
Робочий зошит з дисципліни «Технічна механіка» розділ «Статика» для індивідуальної роботи містить повний об’єм тем, що відповідають програмі з дисципліни «Технічна механіка», розділ «Статика». У рекомендаціях надані теоретичні питання та виділені задачі, розв’язавши які, здобувач освіти може самостійно зробити висновок про якість своєї підготовки.
Основна мета виконання індивідуальних робіт здобувачем освіти:
- Розвиток творчих здібностей та активізація розумової і практичної діяльності здобувачів освіти
- Формування у здобувачів освіти практичних навичок
- Здобуття здобувачем освіти глибокої системи знань і навичок
- Творчо сприймати та осмислювати практичний матеріал
- Прищеплювати навички щоденної практичної роботи в одержанні та узагальненні компетентностей, програмних результатів навчання
Рецензія
Робочий зошит з дисципліни «Технічна механіка», розділ «Статика» передбачає основний уклін на оволодіння здобувач освітиами теоретичними та практичними навичками вивчення тем розділу «Статика».
Надає поради, щодо підготовки здобувачів освіти до лекційного та практичного матеріалу. Викладач врахував всі особливості і можливості здобувачів освіти, надавши приклади розв’язання задач.
Методичні вказівки підвищують ефективність підготовки здобувачів освіти до складання іспиту(заліку) з дисципліни «Технічна механіка»
Рецензент
викладач вищої категорії
викладач-методист, колова ЦК Транспорту
ДТЕФК Михайло ЯРМОШЕНКО
Р Е Ц Е Н З І Я
на робочий зошит з дисципліни «Технічна механіка», розділ «Статика»
з дисципліни «ТЕХНІЧНА МЕХАНІКА»
для студентів спеціальності 274 «Автомобільний транспорт», який укладено викладачем вищої категорії, Арнаут К.В. закладу освіти Дніпропетровський транспортно-економічний фаховий коледж
Робочий зошит з дисципліни «Технічна механіка», розділ «Статика» з дисципліни «ТЕХНІЧНА МЕХАНІКА», який було представлено на розгляд, було створено згідно вимог освітньої програми спеціальності 274 «Авто-мобільний транспорт». Кількість годин, які відведені на організацію самостійної роботи студентів витримано.
Наданий на рецензію зошит містить вимоги щодо компетентностей, програмних результатів навчання, а також зв'язки між базовими та загально-технічними дисциплінами.
Робочий зошит з дисципліни «Технічна механіка», розділ «Статика» передбачає основний уклін на оволодіння здобувачами освіти теоретичними та практичними навичками вивчення тем розділу «Статика».
Надає поради, щодо підготовки здобувачів освіти до лекційного та практичного матеріалу. Викладач врахував всі особливості і можливості здобувачів освіти, надавши приклади розв’язання задач.
Методична розробка підвищує ефективність підготовки здобувачів освіти до складання іспиту(заліку) з дисципліни «Технічна механіка»
У цілому робочий зошит з дисципліни «Технічна механіка», розділ «Статика» з дисципліни «ТЕХНІЧНА МЕХАНІКА» для здобувачів освіти спеціальності 274 «Автомобільний транспорт» може бути використаний викладачами, які пов’язані з викладанням загально-технічних дисциплін та викладачами усіх інших напрямків для ознайомлення з технологіями використаними і апробованими під час роботи зі здобувачами освіти.
|
Рецензент: |
________________ |
Михайло ЯРМОШЕНКО викладач вищої категорії, викладач-методист голова циклової комісії «Транспорту» Дніпровського транспортно-економічного фахового коледжу |
ВСТУП
Індивідуальна робота здобувача освіти містить у собі опрацювання тем, які надаються викладачем, відповідно до робочої програми, роботу з рекомендованою літературою або електронним матеріалом. На перевірку викладачеві надається робочий зошит здобувача освіти. Здобувачі освіти, які не виконали індивідуальну роботу, до практичної роботи не допускаються.
Для організації індивідуальної роботи здобувачу освіти викладач має надати обєм роботи для самостійних дій, а потім забовязати його захистити отримані результати і поставити оцінку за результатам.
Індивідуальна робота №1
Тема: В’язі та їх реакції
Мета: Оволодіти основними термінами та означеннями. Вивчити основні визи в’язей та реакції, що виникають.
- Встановіть відповідність між терміном та його означенням за допомогою стрілок
|
Термін |
Означення |
|
Вільне тіло |
тіло, переміщення якого в просторі обмежено іншими тілами (в’язями). |
|
Невільне тіло |
сила, яка характеризує дію в’язей на дане тіло |
|
Активна сила |
тіла, які обмежують рух даного тіла в просторі |
|
Реактивна сила |
тіло, яке може здійснювати довільні переміщення в просторі в будь-якому напрямку. |
|
В’язі |
сила, яка характеризує дію інших тіл на задане, що викликає або може викликати зміну його кінематичного стану. |
|
Реакція в’язі |
сила, з якою в’язь діє на дане тіло. |
- За рисунком вкажіть основні види в’язей та опишіть реакції, які в них виникають
|
|
Рисунок в’язі |
Назва |
Реакції |
||
|
1 |
|
|
|
||
|
2 |
|
|
|
||
|
3 |
|
|
|
||
|
4 |
|
|
|
||
|
5 |
|
|
|
||
|
6 |
|
|
|
||






Висновок:___________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Індивідуальна робота №2
Тема: Геометричний метод складання сил, прикладених в одну точку
Мета: ознайомитися з поняттями про плоску систему збіжних сил, умовами рівноваги, алгоритмом розв’язання задач на плоску систему збіжних сил
- Сформулюйте четверту аксіому статики (правило складання двох сил)
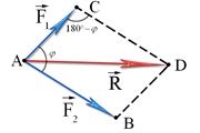
Рис. 1 Правило паралелограма
____________________________________________________________
____________________________________________________________
____________________________________________________________
____________________________________________________________
Визначення рівнодійної двох сил за правилом паралелограма називається векторним, або геометричним, додаванням і виражається векторною рівністю:
![]()
- Запишіть формулу модуля рівнодійної двох сил
____________________________________________________________
При графічному визначенні рівнодійної двох сил замість правила паралелограма можна користуватися правилом трикутника.
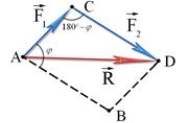
Рис. 2 Правило трикутника
- Дайте означення терміну збіжні сили
Збіжними силами називають __________________________________
_______________________________________________________________
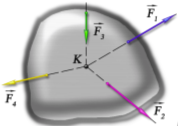
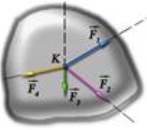
Рис. 3 Збіжні сили
- Силовий многокутник - це________________________________
__________________________________________________________________
__________________________________________________________________
__________________________________________________________________
__________________________________________________________________
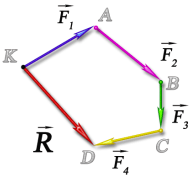
Рис. 4 Силовий многокутник
- Коли система збіжних сил знаходиться в рівновазі?
__________________________________________________________________
__________________________________________________________________
__________________________________________________________________
__________________________________________________________________
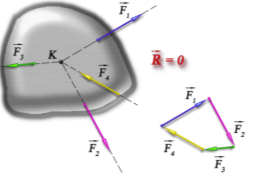
Рис. 5 Система збіжних сил
- Що таке проекція вектора на вісь?
__________________________________________________________________
__________________________________________________________________
__________________________________________________________________
__________________________________________________________________
- Продовжити речення
Проекція вектора вважається додатною (+), якщо
__________________________________________________________________
__________________________________________________________________
Проекція вектора вважається від'ємною (—), якщо
__________________________________________________________________
__________________________________________________________________
- Зробіть рисунки сили та її проєкції
- Вектор сили складає з додатним напрямом осі х гострий кут α:
- Сила складає з додатним напрямом осі х тупий кут α:
- Сила перпендикулярна осі х:
Сила паралельна осі х:
- Продовжіть речення
Проекція векторної суми на будь-яку вісь__________________________
__________________________________________________________________
__________________________________________________________________
![]()
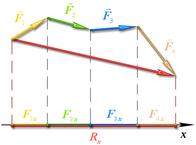
Рис. 6 Проекція векторної суми на вісь
- Запишіть геометричну умова рівноваги ПСЗС
__________________________________________________________________
__________________________________________________________________
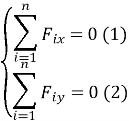
11 Запишіть аналітичну умову рівноваги ПСЗС
__________________________________________________________________
__________________________________________________________________

де ![]() - сума проекцій всіх сил на вісь х;
- сума проекцій всіх сил на вісь х;
![]() - сума проекцій всіх сил на вісь у.
- сума проекцій всіх сил на вісь у.
- Записати алгоритм рішення задач на плоску систему збіжних сил.
Висновок:___________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Індивідуальна робота №3
Тема: Проекція сили. Визначення рівнодійної збіжної системи сил. Умови та рівняння рівноваги збіжних сил
Проекції сили на осі ОХ та ОУ визначають за формулами:
![]()

![]()
![]()
![]()
![]() Рх = Р . cosα Ру = Р . sinα
Рх = Р . cosα Ру = Р . sinα
Модуль рівнодійної системи збіжних
![]() сил визначають за формулою:
сил визначають за формулою:
![]()
![]()
![]()
Завдання № 1: Визначити проекції наведених сил на осі координат:
![]() а) Дано:
а) Дано:
![]() Р1 = 2 Н Р1х = Р1у =
Р1 = 2 Н Р1х = Р1у =
![]() Р2 = 10 кН Р2х = Р2у =
Р2 = 10 кН Р2х = Р2у =
Р3 = 17 Н Р3х = Р3у =
α = 30°
![]()
![]()
![]()
![]() б)
б)
 Дано:
Дано:
Р1 = 23 кН
![]() Р2 = 24 Н
Р2 = 24 Н
![]() Р3 = 25 кН
Р3 = 25 кН
β = 45°
![]()
Завдання № 2: Записати рівняння для проекцій рівнодійної системи сил:
![]() а) Дано:
а) Дано:
Р1 α = 45°
![]() Р2 β = 60°
Р2 β = 60°
![]()
![]()
![]() Р3
Р3
![]()
![]()
![]() б)
б)
Дано:
![]() Р1 α = 30°
Р1 α = 30°
![]() Р2 β = 45°
Р2 β = 45°
![]()
![]() Р3
Р3
![]()
![]()
Рівняння рівноваги плоскої системи збіжних сил:

Завдання № 3: Побудувати у системі координат систему наведених сил.
![]()

![]()
![]()
![]()
![]()
![]()
Завдання № 4: Визначити зусилля у стрижнях.
![]()

 Дано:
Дано:
Р = 12 Н
α = 60°
![]()
![]() β = 30°
β = 30°
![]() S1 ; S2 - ?
S1 ; S2 - ?
Завдання № 5: Визначити зусилля у стрижнях.
![]()

 Дано:
Дано:
Р = 25Н
α = 45°
![]() β = 45°
β = 45°
![]() S1 ; S2 - ?
S1 ; S2 - ?
Питання для самоконтроля:
- Як знайти проекцію сили на вісь ?
___________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
- У якому випадку проекція вектора на вісь дорівнює 0 ?
__________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
- Як розкласти силу на складові по осях координат?
__________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
- У якому випадку рівнодійна плоскої системи збіжних сил дорівнює 0 ?
__________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
- Яка система сил називається збіжною?
__________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
- При якому розташуванні координатних осей рівняння рівноваги збіжної системи сил будуть простішими
__________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Самостійна робота №4
Тема: «Умови рівноваги плоскої системи збіжних сил»
Мета: навчитичь наводити формули для знаходження значення та напряму рівнодійної: двох, трьох та більшої кількості сил, що збігаються на площині; використовати геометричні та аналітичні умови рівноваги при вирішенні задач.
Плоска система збіжних сил (ПСЗС)- це система сил лінії дії яких лежать в одній площині та перетинаються в одній точці. Розрізняють ще просторову систему збіжних сил – система сил лінії дії якої знаходяться в різних площинах, але перетинаються в одній точці.

 а) Кріплення вантажу б) Підйом вантажу
а) Кріплення вантажу б) Підйом вантажу 
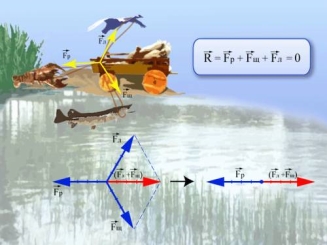
в) Стропи парашута г) Схематичне зображення байки Крилова
«Лебідь ,рак та щука»
Рис. 1. Приклади систем збіжних сил
Геометрична умова рівноваги ПСЗС
ПСЗС знаходиться в рівновазі, коли силовий багатокутник замкнений. Тобто, сума векторів системи дорівнює нулю ( R=0).
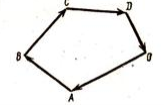
Приклад виконання типового завдання
|
Силовий багатокутник |
Визначення рівнодійної |
|
Рис.1 |
R = ОД R = ОА + АВ + ВС + СД ОА + АВ + ВС + СД – ОД = 0, система врівноважена вектором ОД.
|
|
Рис.2 |
ОА + АВ + ВС + СД + ДО = 0 ОА + АВ + ВС + СД + ДО = R R = 0, система знаходиться в рівновазі. |

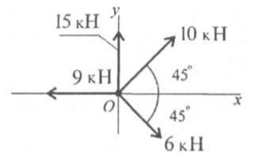
Аналітична умова рівноваги ПСЗС
Система знаходиться в рівновазі, коли сума проекцій всіх сил системи на координатні осі дорівнює нулю.
Приклад виконання типового завдання
|
Плоска система збіжних сил |
Визначення проекції рівнодійної на вісь х |
|
Рис. 3 |
9 +
Чи знаходиться задана система в рівновазі? |
Завдання
Доповніть визначення.
ПСЗС – це система … лінії … яких лежать в одній … та … в одній … .
Чому в байці Крилова «Лебідь, рак та щука» віз залишається на одному місці?_____________________________________________________________
Визначити модуль рівнодійної системи збіжних сил, якщо проекції додатних векторів дорівнюють: P1x=50 H; P2x= - 30 H; P3x=60H; P4x=70 H.

Скориставшись прикладом знайти рівнодійну.
|
Силовий багатокутник |
Визначення рівнодійної |
|
Рис.1 |
|
|
Рис.2 |
|


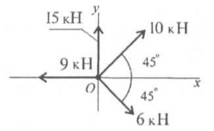
Скориставшись прикладом визначити проекцію рівнодійної на вісь у.
|
Плоска система збіжних сил |
Визначення проекції рівнодійної на вісь у |
|
Рис. 3 |
|
Питання для самоперевірки
- Дайте визначення збіжної системи сил?
______________________________________________________________________________________________________________________________________________________________________________________________________
- Що називається силовим багатокутником?
______________________________________________________________________________________________________________________________________________________________________________________________________
- В чому полягає графічний метод визначення рівнодійної сили?
______________________________________________________________________________________________________________________________________________________________________________________________________
- Поясніть графічну умову рівноваги збіжної системи сил?
______________________________________________________________________________________________________________________________________________________________________________________________________
- Дайте визначення аналітичної умови рівноваги збіжних сил.
______________________________________________________________________________________________________________________________________________________________________________________________________
Висновок:___________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Індивідуальна робота №5
Тема: Дослідження рівноваги плоскої системи збіжних сил
Мета: Вивчити методику і отримати навички в дослідженні рівноваги плоскої системи збіжних сил.
Аналітичний метод дослідження рівноваги плоскої системи збіжних сил виконується на основі рівнянь рівноваги за наступним планом:
перший етап — виділяють об'єкт рівноваги — тіло або точку, де перетинаються лінії дії всіх сил, тобто точку, рівновагу якої в даной задачі слід розглянути;
другий етап — до виділеного об'єкта рівноваги прикладають задані сили;
третій етап — виділену точку або тіло звільняють від зв'язків, їх дію заміняють реакціями;
четвертий етап — вибирають координатні осі та складають рівняння рівноваги;
п'ятий етап — розв'язують рівняння рівноваги;
шостий етап — перевіряють правильність рішення.
Відповідно до варіанта (табл. 1, 2) виконати дослідження заданої системи на основі рівнянь рівноваги .
Таблиця 1. Початкові данні дані.
|
Вариант |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
|
Схема № |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
1 |
2 |
3 |
4 |
5 |
|
F1, kH |
20 |
40 |
20 |
80 |
10 |
15 |
10 |
160 |
55 |
30 |
100 |
35 |
40 |
20 |
25 |
|
F2, kH |
10 |
30 |
50 |
60 |
25 |
35 |
15 |
140 |
45 |
50 |
70 |
5 |
65 |
35 |
45 |
|
F3, kH |
30 |
70 |
70 |
5 |
35 |
50 |
25 |
10 |
15 |
5 |
15 |
15 |
50 |
45 |
15 |
|
Вариант |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
25 |
26 |
27 |
28 |
29 |
30 |
|
Схема № |
6 |
7 |
8 |
9 |
10 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
F1, kH |
5 |
10 |
15 |
30 |
20 |
70 |
75 |
85 |
55 |
50 |
30 |
10 |
20 |
55 |
5 |
|
F2, kH |
10 |
5 |
15 |
30 |
20 |
70 |
75 |
85 |
55 |
50 |
10 |
30 |
50 |
20 |
5 |
|
F3, kH |
25 |
15 |
35 |
40 |
50 |
30 |
45 |
35 |
45 |
10 |
5 |
25 |
40 |
60 |
15 |
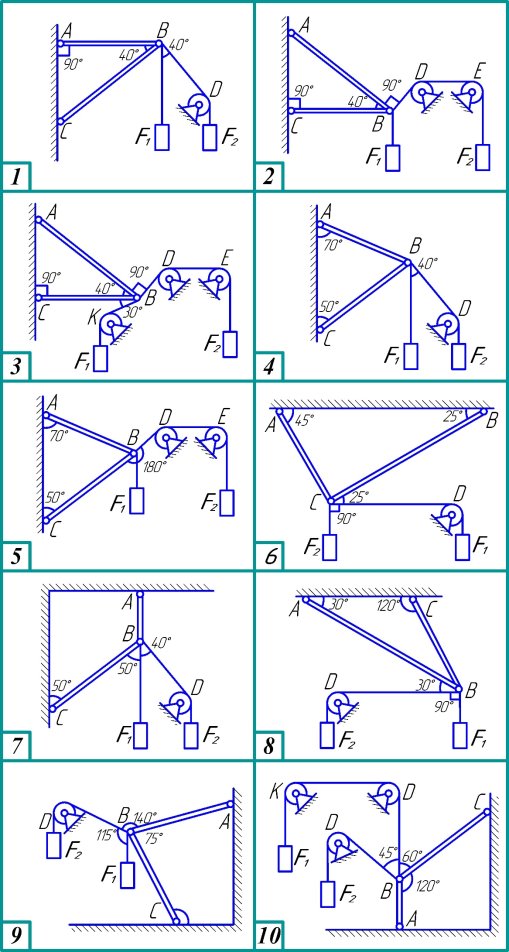
Таблиця 2. Варіанти завдання.
- Виділяємо об'єкт рівноваги - точка, де сходяться лінії дії всіх сил (центр сил).
- Відкидаємо в'язі та замінюємо їх дію реакціями в'язей.
- Вибираємо раціональну систему координат.
- Складаємо розрахункову схему.
- Записуємо рівняння рівноваги та складаємо умови рівня рівноваги плоскої системи збіжних сил:
- Розв'язуємо отримані рівняння відносно невідомих.
- Робимо висновок про отримані результати.
Висновок:___________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Критерії оцінювання здобувачів освіти
Критерії оцінювання знань здобувачів освіти
До навчальних досягнень здобувачів освіти з технічної механіки, які безпосередньо підлягають оцінюванню, належать:
- теоретичні знання, що стосуються понять, тверджень, теорем, властивостей, ознак, методів та ідей механіки;
- знання, що стосуються способів діяльності, які можна подати у вигляді системи дій (правила, алгоритми);
- здатність безпосередньо здійснювати уже відомі способи діяльності відповідно до засвоєних правил;
- здатність застосовувати набуті знання і вміння для розв’язання навчальних і практичних задач, коли шлях, спосіб такого розв’язання потрібно попередньо визначити (знайти) самому.
Відповідно до ступеня оволодіння зазначеними знаннями і способами діяльності виокремлюються такі рівні навчальних досягнень здобувачів освіти з технічної механіки:
І - початковий рівень, коли у результаті вивчення навчального матеріалу здобувач освіти:
- називає математичний об’єкт (вираз, формули, геометричну фігуру, символ), але тільки в тому випадку, коли цей об’єкт (його зображення, опис, характеристика) запропонована йому безпосередньо;
- за допомогою вчителя виконує елементарні завдання.
ІІ - середній рівень, коли здобувач освіти повторює інформацію, операції, дії, засвоєні ним у процесі навчання, здатний розв’язувати завдання за зразком.
ІІІ - достатній рівень, коли здобувач освіти самостійно застосовує знання в стандартних ситуаціях, вміє виконувати операції, загальна методика і послідовність (алгоритм) яких йому знайомі, але зміст та умови виконання змінені.
IV - високий рівень, коли здобувач освіти здатний самостійно орієнтуватися в нових для нього ситуаціях, складати план дій і виконувати його, пропонувати нові, невідомі йому раніше розв’язання, тобто його діяльність має дослідницький характер.
Оцінювання якості підготовки здобувачів освіти з технічної механіки здійснюється в двох аспектах: рівень володіння теоретичними знаннями, який можна виявити в процесі усного опитування, та якість практичних умінь і навичок, тобто здатність до застосування вивченого матеріалу під час розв’язування задач і вправ.
|
Рівні навчальних досягнень |
Бали |
Критерії оцінювання навчальних досягнень
|
|
І. Початковий
|
1 |
Здобувач освіти:
|
|
2 |
Здобувач освіти:
|
|
|
3 |
Здобувач освіти:
|
|
|
ІІ. Середній |
4 |
Здобувач освіти:
|
|
5 |
Здобувач освіти:
|
|
|
6 |
Здобувач освіти:
|
|
|
ІІІ. Достатній |
7 |
Здобувач освіти:
|
|
8 |
Здобувач освіти:
|
|
|
9 |
Здобувач освіти:
|
|
|
IV. Високий |
10 |
Знання, вміння й навички здобувача освіти повністю відповідають вимогам програми, зокрема: здобувач освіти:
|
|
11 |
Здобувач освіти:
|
|
|
12 |
Здобувач освіти:
|
Рекомендована література
- А.В. Мовнин Основы технической механики. –М.: Транспорт, 1990.
- А.А. Эрдеди, Ю.А. Медведев и др. Техническая механика. –М.:Высшая школа, 1991.
- Техническая механика: Олофинская В.П. Издательство: Форум Инфра-М Серия: Профессиональное образование, 2003. Страниц 349
1

про публікацію авторської розробки
Додати розробку