Основні поняття та аксіоми статики Плоскі системи збіжних сил.
Лекція з дисципліни
«Технічна механіка»
273 Залізничний транспорт
Галузь знань 27 «Транспорт»
освітньо-кваліфікаційний рівень молодший спеціаліст
для студентів заочної форми навчання
Лекція №1
Дисципліна: Технічна механіка
Блок МПН.08.01 Види напруженого стану деталей
Модуль ПФ.С.ОЗ.Р.03.10-1 Види напруженого стану деталей
Тема: Основні поняття та аксіоми статики Плоскі системи збіжних сил. Геометричне та аналітичне складання збіжних сил. Пара сил. Момент пари сил, плече пари. Рівновага пар.
План лекції:
1. Основные понятия статики.
2. Плоская система сходящихся сил.
3. Пара сил. Момент пари сил, плече пари.
4. Рівновага пар.
Основним завданням статики є вивчення загальних законів рівноваги матеріальних точок і твердих тіл. Для вивчення законів рівноваги статики необхідно знати такі поняття.
Матеріальна точка - це умовно прийняте тіло, розмірами якого можна знехтувати в порівнянні з відстанню, на якому воно знаходиться.
Абсолютно тверде тіло - це умовно прийняте тіло, яке не деформується під дією зовнішніх сил.
Сила - це векторна величина, яка характеризує взаємодію меясду тілами. Дія сили характеризується трьома факторами: точкою докладання, напрямком, чисельним значенням (рисунок 1).
За одиницю сили приймається 1 Н:
1кН=103Н;
1МН=1СуН.
Позначення різних типів сил:
F - зовнішня сила;
Fx, Fy - проекція сили на вісь х і у відповідно;
R-реакція опори або зв'язку;
F∑ - рівнодіюча сила.

Рисунок 1-Сила
Система сил - це сукупність всіх сил, що діють на тіло. Дві сили або дві системи сил називаються еквівалентними, якщо вони надають на тіло однакову дію.
Рівнодіюча називається сила, яка надає таку ж дію на тіло, як і кілька сил,
разом узятих. Рівнодіюча сила дорівнює геометричній сумі всіх сил, що діють на тіло:
n
F∑=∑ Fі
І=l
де i = 1, 2, ..., п - порядковий номер сили.
Врівноважує називається така сила, яка дорівнює за величиною рівнодіюча силі, але направлена в протилежну сторону.
Основні аксіоми статики. В основу статики покладено п'ять аксіом.
1 Принцип інерції: матеріальна точка знаходиться в рівновазі, якщо
рівнодіюча всіх сил, що діють на неї, дорівнює нулю, тобто
F∑ = ∑Fi = 0
2 Принцип рівності двох сил: дві сили діють на одне тіло
є взаємноврівноважуючого, якщо вони рівні за величиною,
протилежні за напрямком і лежать на одній прямій (рисунок 2).
3 Принцип приєднання або виключення взаємноврівноважуючого
сил: механічне стан тіла не зміниться, якщо до нього приєднати або виключити взаємноврівноважуючого систему сил (рисунок 3).

Рисунок 2,3 –Принцип рівності
4 Принцип паралелограма: рівнодіюча двох сил, прикладених до тіла в одній точці і спрямованих один до одного під кутом, дорівнює геометричній сумі цих сил і зображується діагоналлю паралелограма, побудованого на цих силах як на сторонах (рисунок 4).
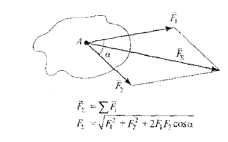
Рисунок 4-Принцип паралелограма
5 Принцип дії і протидії: сили, з якими два тіла діють один на одного, рівні за величиною, протилежні за напрямком і лежать на одній прямій (проте не врівноважують один одного, так як прикладені до різних тіл) (рисунок5).

Рисунок 5-Сили дії
Зв'язки та їх реакції.
Вільне тіло - це тіло, руху якого ніщо не перешкоджає.
Невільний тіло - це тіло, руху якого перешкоджають інші тіла.
Зв'язок - це тіло, яке перешкоджає руху інших тіл.
Реакція зв'язку - це сила, з якою зв'язок діє на тіло, перешкоджаючи його руху.
Існує шість основних типів зв'язків
1 у вигляді гладкої поверхні (поверхня стола, рівною дороги). реакція
зв'язку спрямована перпендикулярно поверхні зв'язку (рисунок 6);
2 у вигляді шорсткою поверхні. Умовно зображується похилою площиною (рисунок 7). повна реакція зв'язку R спрямована під кутом (Rn, - нормальна реакція опори);
3 у вигляді прямого жорсткого стержня з шарнірним закріпленням кінців. Реакція стержня направлена уздовж його осі (рисунок 8);
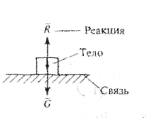
Рисунок 6-Гладка поверхня
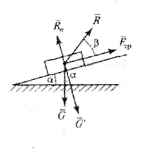
Рисунок 7-Похилая площина
4 у вигляді точкової опори. Реакція спрямована перпендикулярно поверхні опори (рисунок 8);
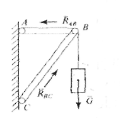
Рисунок 8-Реакція перпендикулярно поверхні опори
5 у вигляді ребра двухграпного кута. Реакція спрямована перпендикулярно
поверхні тіла опори (рисунок 9);
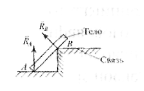
Рисунок 9-Реакція перпендикулярно поверхні тіла опори
6 у вигляді гнучкого зв'язку (ремінь, канат, ланцюг). Реакція спрямована уздовж зв'язку (рисунок 10)
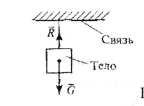
Рисунок 10-Реакція уздовж зв`язку
Системи сил і умови їх рівноваги
Плоскою системою сходяться сил (ПССС) називається система сил, лінії дії
яких лежать в одній площині і перетинаються в одній точці (рисунок 11)
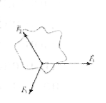
Рисунок 11-Плоска система
Щоб з'ясувати, чи буде дане тіло перебувати в рівновазі під дією плоскої системи збіжних сил, необхідно знайти її рівнодіюча силу. Якщо рівнодіюча дорівнює нулю, система знаходиться в рівновазі, якщо не дорівнює нулю - чи не знаходиться в рівновазі.
Існує два способи визначення рівнодійної сили плоскої системи збіжних сил: геометричний і аналітичний.
Геометричний спосіб визначення рівнодіючої - побудова силового багатокутника: в довільно обрану точку переноситься об'єкт рівноваги, в цю точку поміщається початок першого вектора, перенесеного паралельно самому собі; до кінця першого вектора переноситься початок другого вектора, до кінця другого - початок третього і т.д.
Якщо побудований силовий багатокутник виявиться незамкнутим, значить, дана система сил не знаходиться в рівновазі. У цьому випадку вектор рівнодійної сили з'єднає початок першого вектора з кінцем останнього (рисунок 12 а).
а) б)  Рисунок 12- Системи збіжних сил
Рисунок 12- Системи збіжних сил
Геометричне умова рівноваги плоскої системи збіжних сил полягає в замкнутості силового багатокутника, тобто при побудові силового багатокутника кінець останнього вектора збігається з початком першого (рисунок 12,6).
Аналітичний спосіб визначення рівнодіючої: всі сили проектуються на дві
взаємно перпендикулярні осі координат, а потім знаходиться алгебраїчна сума проекцій всіх сил на вісь х і вісь у. Якщо алгебраїчна сума проекцій всіх сил дорівнює нулю, дана система сил перебуває в рівновазі.
Аналітична умова рівноваги плоскої системи збіжних сил:
∑F1X = 0, ∑ F I y = 0
Плоска система пар сил і умова її рівноваги

Рисунок 13- Момент сили
Якщо на тіло, закріплене в деякій точці Л, діє сила F, то тіло повернеться щодо цієї точки. Обертальний рух тіла характеризується обертовим моментом М.
Моментом сили F відносно точки А називається величина, що чисельно дорівнює добутку сили на плече (рисунок 13):
де I- плече (перпендикуляр, опущений з точки на лінію дії сили).
За одиницю крутного моменту приймається 1 Н·м: 1кН·м=10³Н·м
.
Рисунок 14- Пара сил
Парою сил називається система двох сил, рівних за величиною, протилежні за напрямком і не лежать на одній прямій (рисунок 14).
Пара сил надає на тіло, що обертається, дія, яка характеризується вращющім моментом М.
Обертающій момент пари сил дорівнює добутку однієї з сил пари на плече:
М = F1h
де h - плече пари сил (перпендикуляр, відновлений між лініями дії сил). Пара сил на схемах зображується дугоподібної стрілкою (рисунок 15 ).

Рисунок 15-Пара сил
Пару сил можна замінити однією рівнодіюча силою. Пара сил не має проекцій на осі I координат. Якщо на тіло діє J кілька пар сил, то їх можна замінити однією рівнодіюча парою, момент якої дорівнює алгебраїчній сумі моментів складових пар сил, що діють на тіло (рисунок 16):
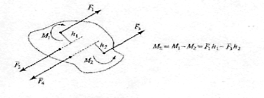
Рисунок 16-Пара сил
Дві пари сил називаються еквівалентними, якщо вони надають на тіло однакову дію. У еквівалентних пар сил обертаючі моменти повинні бути однакові як за величиною, так і за напрямком.
Умова рівноваги плоскої системи пар сил: алгебраїчна сума моментів доданків пар сил повинна бути дорівнює нулю, тобто
∑Mі = 0
Контрольні питання:
1 Дати визначення матеріальної точки
2 Що називається абсолютно твердим тілом ?
3 Дати визначення сили
4 Дати визначення системи сил
5 Основні аксіоми статики
6 Дати визначення зв'язку
7 Реакція зв'язку
8 Що називається моментом сили ?
9 Що називається парою сил ?
10 Умова рівноваги плоскої системи пар сил
Література:
1М.С. Мовнин, А.Б. Йзраелит, А.Г. Рубашкін «Основи технічної механіки», с 5-21

про публікацію авторської розробки
Додати розробку