Простора система сил. Поняття про момент сили відносно осі. Центр паралельних сил. Центр ваги тіла. Визначення центра ваги плоских фігур
Лекція з дисципліни
«Технічна механіка»
273 Залізничний транспорт
Галузь знань 27 «Транспорт»
освітньо-кваліфікаційний рівень молодший спеціаліст
для студентів заочної форми навчання
Лекція № 2
Дисципліна: Технічна механіка
Блок МПН.08.01 Види напруженого стану деталей
Модуль ПФ.С.ОЗ.Р.03.10-1 Види напруженого стану деталей
Тема: Простора система сил. Поняття про момент сили відносно осі.
Центр паралельних сил. Центр ваги тіла. Визначення центра ваги плоских фігур.
План лекції:
1. Плоская система произвольно расположенных сил и условие ее равновесия
2. Рівновага просторової системи сил.
3. Момент сили відносно осі
4. Центр ваги
Плоская система произвольно расположенных сил и условие ее равновесия
Приведення сили до цієї точки полягає в тому, що розглядається силу F переносять паралельно самій собі в довільно обрану точку О. Для того щоб механічний стан тіла не змінилося, силу F врівноважують силою F "(рисунок 1).

Рисунок 1-Плоска система
В результаті приведення сили F до точки Про вийшла система сил, що складається з сили F /, рівній і паралельної даній силі F, і пари сил (F і F "), момент якої дорівнює моменту цієї сили F щодо точки 0.
М = M0(F).
Рівновага просторової системи сил.
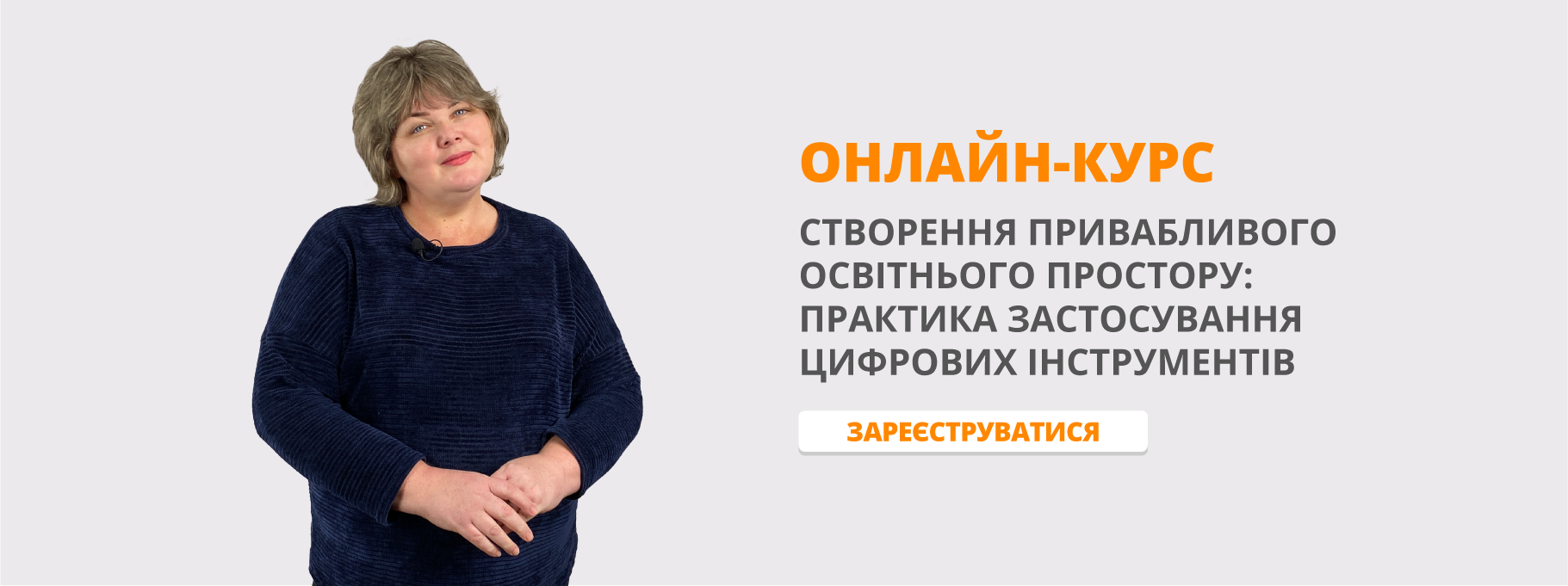
Будь-яку силу P можна представити діагоналлю прямокутного паралелепіпеда, побудованого на складових X, Y Z, які по модулю рівні проекція даної сили на осі координат х, у, z. Модуль і напрям P визначав за формулами:
![]()
![]()
![]()
![]()
![]()
![]() P ,
P ,
![]()
cos(P,
- X ,
![]() P
P
![]() cos(P,
cos(P,
- Y ,
![]() P
P
![]() cos(P,
cos(P,
- Z .
![]() P
P
Рисунок 2-Прямокутний параллелепипед
Система сил, лінії дії яких не лежать в одній площині, але. перетинаються даній точці, називається просторової системою сходяться сил. Рівнодіюча просторової системи сил, що сходяться, дорівнює геометричній сумі доданків сил:
![]()
![]()
![]()
![]()
![]() R P1 P 2 ... P n ∑ P .
R P1 P 2 ... P n ∑ P .
Рівнодіюча R виражається замикає стороною просторового силового багатокутника, сторони якого рівні й паралельні даним силам. Зокрема, якщо число доданків сходяться сил дорівнює трьом, то їх рівнодіюча по модулю і напрямку виражається діагоналлю паралелепіпеда, побудованого на цих силах. Силовий багатокутник просторових жавної системи сходяться сил не є плоскою фігурою, тому при додаванні сходяться сил, які не лежать в одній площині, краще аналітичний метод.
Теорема. Проекція рівнодіюча системи сходяться сил на ка- кую-небудь вісь дорівнює сумі проекцій всіх сил на цю ж вісь.
Rx ∑ X ,
RY ∑Y ,
Rz ∑ Z .
Рівновага просторової системи збіжних сил
Для рівноваги просторової системи збіжних сил необхідно і достатньо, щоб рівнодіюча цієї системи сил дорівнювала нулю, т.е.
P = ∑ P = 0
Ця рівність висловлює умова замкнутості силового багатокутника
даної системи сил, т. е. умова рівноваги просторової системи сил, що сходяться, в геометричній формі. Замість векторної рівності можна зіставити три скалярних:
∑ X 0 , ∑Y 0 , ∑ Z 0 ,
які виражають умови рівноваги просторової системи збіжних сил в аналітичній формі і їх називають рівняннями рівноваги просторової системи збіжних сил. Система рівнянь дозволяє визначити тільки три невідомих. Якщо число невідомих більше трьох, то пространст- венная система сходяться сил є статично невизначеної.
Момент сили відносно осі
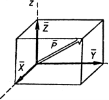
Момент сили Р відносно осі z дорівнює моменту проекції цієї сили на площину, перпендикулярну до осі z, щодо точки О (точка пересічення осі z площиною τ)
![]()
![]() M z (P) M o ( P ),
M z (P) M o ( P ),
![]() M P P h Ph cos ,
M P P h Ph cos ,
o
Рисунок 3- Момент сили відносно осі
де Р τ - проекція сили P на площину τ, перпендикулярні до осі z; h - довжина перпендикуляра, спущеного з точки О на лінію дії проекції P τ
Відзначимо, що проекція сили на вісь - скалярна величина; проекція сили на площину - вектор.
Момент вважається позитивним, якщо, дивлячись з кінця позитивного напрямку осі, бачимо обертання площини під дією складової P против часовой стрелки.
В іншому випадку момент вважається негативним. Момент сили відносно осі дорівнює нулю, якщо сила перетинає вісь (h = 0)
або паралельна осі( P = 0 ).
Рівновага довільної просторової системи сил
Теорема. Для рівноваги просторової системи сил необхідно і достатньо, щоб головний вектор і головний момент дорівнювали нулю, т. е.
![]()
![]() R 0 , М 0 .
R 0 , М 0 .
Ці два векторних рівності можна замінити шістьма скалярними:
∑ Х 0 ; ∑Y 0 ; ∑ Z 0 ;
∑ М х=0; ∑ М Y=0; ∑ М Z=0
Наведені умови називають рівняннями рівноваги довільної просторової системи сил: для рівноваги тіла в просторі необхідно і досить, щоб суми проекцій всіх сил на координатні осі і суми моментів всіх сил щодо трьох координатних осей дорівнювали нулю.
Центри ваги
Сила тяжіння - це сила, з якою тіло притягується до землі. Центр тяжкості - це точка прикладання сили тяжіння (рисунок 4).

Рисунок 4-Центр тяжкості
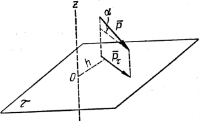
Положення центра ваги простих геометричних фігур: 1) в прямокутнику, квадраті, ромбі, параллелограмме - на перетині діагоналей (рисунок 5);
Рисунок 5-Геометричні фігури
1) в трикутнику - на перетині медіан (рисунок 6):
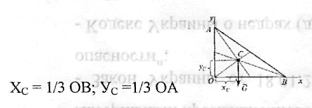
Рисунок 6-Трикутник
2) в круговому секторі або півколі - в точці з координатами:.
а)Хс = г, Ус=2г/3я (рисунок 7,а) б)Хс = 2г/Зл: Ус = г (рисунок 7,6)
f
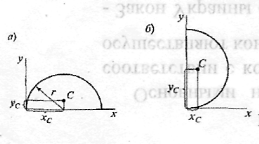
Рисунок 7-Кути
3) в конусі або повної піраміді - на 1/3 висоти від підстави (рисунок 8):
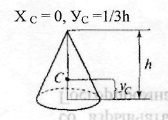
Рисунок 8-Конус
Якщо плоска фігура має неправильну геометричну форму, то центр ваги такої фігури можна визначити двома способами:
1) методом підвішування фігури на вістрі;
2) теоретичним методом. В цьому випадку плоска фігура розбивається на певну кількість елементарних фігур, що мають правильну геометричну форму. Потім визначається положення центра ваги і площі кожної елементарної фігури. Для того щоб знайти координати центру ваги заданої складної фігури, використовуються наступні формули:
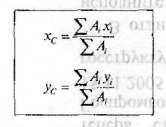
де :
А і - площі елементарних фігур, на які розбита складна фігура;
хі, уі; - координати центру ваги кожної елементарної фігури щодо випадкових осей х і у.
Контрольні питання:
1 Дати пояснення плоскої системи произвольно расположенных сил и условие ее равновесия
2 Дати визначення рівноваги просторової системи сил.
3 Дати пояснення моменту сили відносно осі
4 Що називається центром ваги ?
Література:
1М.С. Мовнин, А.Б. Йзраелит, А.Г. Рубашкін «Основи технічної механіки», с 26-54
![]()

про публікацію авторської розробки
Додати розробку