плани конспекти уроків для ПТНЗ з предмету Сільськогосподарські машини 2 курс
ДПТНЗ ЦАПЛ
ПЛАНИ КОНСПЕКТИ УРОКІВ ІІІ КУРС
СІЛЬСЬКОГОСПОДАРСЬКІ МАШИНИ
ПОУРОЧНО-ТЕМАТИЧНИЙ ПЛАН
теоретичних занять з предмету
“ СІЛЬСЬКОГОСПОДАРСЬКІ МАШИНИ”
для професії Термін навчання 3 роки
"ТРАКТОРИСТ-МАШИНІСТ СІЛЬСЬКОГОСПОДАРСЬКОГО ВИРОБНИЦТВА, СЛЮСАР-РЕМОНТНИК, ВОДІЙ АВТОТРАНСПОРТНИХ ЗАСОБІВ"
|
№ з\п |
ТЕМА |
Кількість годин |
№ Групи ДАТА |
||
|
Теоретичні |
ЛПЗ |
|
|
||
|
1 |
2 |
3 |
4 |
5 |
6 |
|
5 |
Машини для зрошення |
|
|
|
|
|
39 |
Машині для очищення і осушення боліт та первинного обробітку площі. |
2 |
|
|
|
|
6 |
Машини для заготівлі кормів |
8 |
2 |
|
|
|
40 |
Технологія робіт і система машин для кормодобування. Косарки . |
2 |
|
|
|
|
41 |
Граблі. Волокуші і підбирачі |
2 |
|
|
|
|
42 |
Стогоклади |
2 |
|
|
|
|
43 |
Силосозбиральні комбайни |
2 |
|
|
|
|
44 |
ЛПЗ Вивчення будови косарок. Їх регулювання. |
|
1 |
|
|
|
45 |
ЛПЗ Вивчення будови прес-підбирачів. Їх регулювання.
|
|
1 |
|
|
|
7 |
Кукурудзо збиральні комбайни |
4 |
|
|
|
|
46 |
Технологія збирання кукурудзи і система збиральних машин. Кукурудзозбиральні машини. |
2 |
|
|
|
|
47 |
Підготовка до роботи кукурудзозбиральних комбайнів та організація їх роботи |
2 |
|
|
|
|
8 |
Картоплезбиральні машини |
6 |
|
|
|
|
48 |
Технологія збирання картоплі .Агротехнічні вимоги |
2 |
|
|
|
|
49 |
Загальна будова картоплекопачів та картоплезбиральних комбайнів. |
2 |
|
|
|
|
Підготовка до роботи і робота картоплезбиральних машин |
2 |
|
|
|
|
|
9 |
Бурякозбиральні машини |
4 |
2 |
|
|
|
50 |
Технологія збирання цукрових буряків. Агротехнічні вимоги. Бурякозбиральні машини |
2 |
|
|
|
|
51 |
Підготовка до роботи бурякозбиральних комбайнів та організація їх роботи |
2 |
|
|
|
|
52 |
ЛПЗ Вивчення будови коренезбиральних машин. Їх регулювання. |
|
1 |
|
|
|
53 |
ЛПЗ Вивчення будови гичкозбиральних машин та корененавантажувачів. Їх регулювання |
|
1 |
|
|
|
10 |
Машини для збирання овочів |
4 |
|
|
|
|
54 |
Агpотехнiчнi вимоги до машин для збиpання овочiв. Технологія збирання овочів. Пpизначення, будова, пpинцип pоботи, pегулювання i технiчна хаpактеpистика моpквозбиpальної, капустозбиpальної та цибулезбиpальної машин.
|
2 |
|
|
|
|
55 |
. Пiдготовка машин до pоботи. Збиpальнi платфоpми та контейнеpи. Технологічне налагодження машин |
2 |
|
|
|
|
11 |
Тракторні причепи |
5 |
|
|
|
|
56 |
Вимоги до пpичепiв.Пpизначення та типи пpичепiв, напiвпpичепiв, їх будова. Ходова частина та поворотнi пристрої. |
2 |
|
|
|
|
57 |
Вплив конструкції пневмоколіс на безпеку праці .Гальмiвнi системи.Пiдготовка пpичепiв до пеpевезення вантажiв. |
2 |
|
|
|
|
58 |
Безпека праці під час перевезення вантажiв.Мiжгосподарськi перевезення. Документацiя.Вимоги безпеки під час експлуатації.
|
1 |
|
|
|
|
12 |
Нові сільськогосподарські машини |
2 |
|
|
|
|
59 |
Сучасні землеобробні машини. Сучасні посівні і садильні машини. Сучасні машини для внесення добрив. |
1 |
|
|
|
|
60 |
Новітні машини для захисту рослин. Нові машини для вирощування картоплі. Сучасні машини для вирощування цукрових буряків. |
1 |
|
|
|
|
Усього годин - 103 |
87 |
16 |
|
||
МАШИНИ ДЛЯ ЗРОШЕННЯ
ПЛАН-КОНСПЕКТ УРОКУ
ТЕРМІН ЧАСУ 2ГОД (1+1)
Тема : 66.Машини для очищення і осушення боліт та первинного обробітку площі.
Навчальна дисципліна: Сільськогосподарські машини
Урок№_39 Дата проведення __________ Група ________
Мета навчального заняття:
* продовжити вивчення методів і прийомів виконання механізованих робіт у сільському господарстві та шляхів і засобів підвищення родючості ґрунтів.
Навчальна:
* сприяти збагаченню знань учнів про сільськогосподарське виробництво;
* сприяти активізації їх розумової діяльності;
* створювати умови для встановлення зв'язку теорії з практикою, з життєвими явищами і виробничими процесами.
Розвиваюча:
* продовжити розвиток умінь, пов'язаних зі сприйняттям і аналізом джерел;
* сприяти розвитку спостережливості і самостійного осмислювання окремих зв'язків, відносин, ознак між собою;
* продовжити виховання навичок культури мовного спілкування;
Виховна:
* продовжити виховання позитивного ставлення до професії Тракторист;
* сприяти формуванню глибокого пізнавального та емоційного інтересу до сільськогосподарського виробництва;
* сприяти прояву задоволеності своєю діяльністю.
Методи навчання:
• словесний;
• дослідний;.
Форма проведення уроку: комбінована
Форма навчальної діяльності: фронтальна, групова, Індивідуальна.
Засоби навчання:
* роздатковий матеріал;
* слово викладача;
• маркер;
• дошка.
• мультимедійний проектор
• компьютер
Хід уроку:
Організаційна діяльність викладача:
1. Організаційний момент (5 хв)
Підготувати учнів до роботи
2. Цілепокладання, мотивація (5 хв)
Спонукати до активного сприйняття і осмислювання матеріалу, викликати інтерес і активність, створити творчу атмосферу колективної роботи.
Визначити тему, цілі і завдання уроку
3. Вивчення нового матеріалу(30 хв)
КОНСПЕКТ УРОКУ
66.Машини для очищення і осушення боліт та первинного обробітку площі
Для осушення заболочених земель створюють сітку водостічних каналів на відстані 50—150 м один від одного, по яких грунтові води відводяться в магістральні канали. Магістральні капали прокладають на відстані 400—1200 м один від одного: по них вода стікає у водойми або в річки.
Водостічні капали бувають відкритого і закритого типу. Відкриті канали прокладають канавокопачами і залишають відкритими протягом усього періоду висушування площі. Закриті ка пали прокладають канавокопачами із закладанням у них труб або хмизу і загортанням дренажно-кротовими машинами.
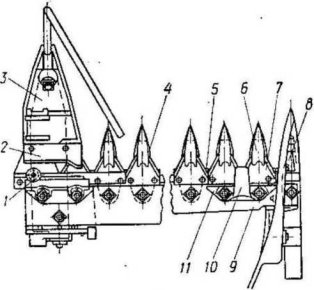
К а н а в о к о п а ч КМ-І400М (К — канавокопач, М — меліоративний, 1400 — глибина канави в міліметрах, ураховуючи насипну частину, М — модернізований) призначений для прокладання відкритих водостічних каналів па торф’яних і мінеральних грунтах. Розміри канави, прокладеної канавокопачем: глибина — до 1400 л/л, ширина на дні —200 мм, ширина на бровці 500 млі. Канавокопач працює на прямій тязі двох-трьох тракторів С-1005 або з одним трактором С-100Б, обладнаним тяговою лебідкою і пристроєм для заякорювання трактора. Продуктивність — 0,42 км/год.
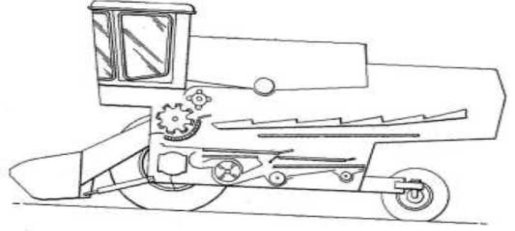
Мал 126 Капапокопач КМ-1400М:
/ — леміш; 2—штир кріплення иіднього колеси; Я — опорне колесо; -/- поширювач полиць; Л — иолиия; 6 —основно рими; 7 — кронштейн блоків; <1 — вертикальний стояк ходової рими: 9 — ніж: — причіп; // — ллбілкя; /2 —пилень; /Я — ходове колесо.
Канавокопач КМ-І400М (мал. 126) складається з двополич- ного корпусу з лемешами і поширювачами полиць 4, черенкового ножа 9, основної рами 6, ходової рами із стояком 8 і причепом 10, двох ходових коліс 13 з поширювачами, опорного колеса <?, на яке спирається корпус у транспортному положенні канавокопача, кронштейна блоків 7, троса і лебідки 11, призначених для піднімання і опускання корпусу в транспортне і робоче положення.
Глибину канави регулюють, переставляючи причіпну скобу па ходовій рамі і опорне колесо корпусу на запасні отвори.
Екскаватор Е-35 2А (Е — екскаватор, 35 — місткість ковша 0,35 кв. м, 2А — модель) призначений для прокладання і очищення магістральних каналів па заболочених землях. Продуктивність— 63—115 м3/год\ глибина канави- 4,4™ 8 м\ тип двигуна — Д-38Л потужністю 48 к, с.
Екскаватор Е-35 2А складається із змінних робочих органів: зворотної лопати з виносною стрілою, прямокутного і профільного ковшів, гусеничної поширеної ходової частини, рами з повно- поворотним механізмом, кабіни з пультом керування, двигуна, лебідково-тросового механізму підіймання і опускання робочих органів. На вимогу замовників до екскаватора додають драглайн, грейфер і вантажопідйомний кран.
Кротодрсн а ж н а м а пі и н а КН-1200 (К — кротодренажна, Н — навісна, 1200 —модель) призначена для прокладай-

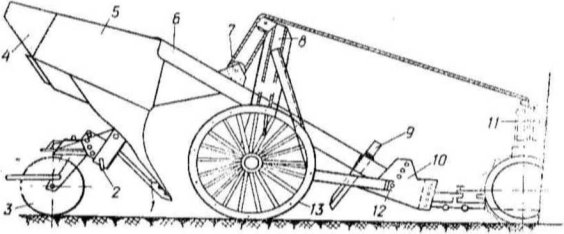
Мал. 127. Кротодренажна машина КН-1200;
/—ніж; 'і- обтІчиі'Лі; Л—візирний пристрій; 4 — рама.
ня кротових дрен на мінеральних і торф’яних грунтах. Глибина прокладання дрен — 0,7— 1,4 м\ діаметр дрен — 6,10 і 27 см\ продуктивність — 0,53— 1,0 км/год', агрегатують з тракто- тором ДТ-55А (з ходозменшувачем) або Т-75.
![]()
![]()
 Кротодренажна машина (мал. 127) складається з плоского ножа / з обтічником 2, до якого шарнірно кріпиться змінний дре- нер, рами 4, візира 3 для контролювання глибини прокладання дрен. Піднімання і опускання ножа з дренером здійснюються гідравлічною системою трактора.
Кротодренажна машина (мал. 127) складається з плоского ножа / з обтічником 2, до якого шарнірно кріпиться змінний дре- нер, рами 4, візира 3 для контролювання глибини прокладання дрен. Піднімання і опускання ножа з дренером здійснюються гідравлічною системою трактора.
Прокладання дрен починають від магістрального відкритого каналу. Нахил дрени до горизонталі у поздовжньому напрямі регулює тракторист основним гідроциліндром, а контролює за допомогою візирного пристрою.
жорстко закріпленого на рамі, і двох візирок, змонтованих за магістральним каналом.
Кущоріз Д-174В (Д — дорожна машина, 174В — модель) призначений для розчищення площ від чагарників і дрібнолісся. Навішують його на трактор С-100. Ширина захвату—3,6 м; продуктивність — до 0,5 га/год.
Кущоріз складається з клиноподібного корпусу 1 (мал. 128) з конусом і підрізальними ножами, універсальної рами, на яку можуть бути навішені кущоріз, бульдозер, викорчовувач або снігоочисник, трубчастого огородження 4 для захисту кабіни трактора, механічної лебідки для піднімання і опускання корпусу. Під час руху трактора з кущорізом ножі І клин-колун зрізують врівень з поверхнею землі чагарники і дрібнолісся діаметром до ЗО см і згортають у два валки.
Корчувач Д-695 (Д — дорожна машина, 695 — модель) призначений для викорчовування пеньків та чагарників, невеликих дерев, каміння вагою до 3 т і навантаження в транспортні засоби або перевезення па невеликі відстані. Агрегатується з трактором Т-100 МБГТІ. Ширина захвату — 2,09—3,55 м. Корчувач (мал. 129) складається з лобового листа /, полині 2 з поширювачами 3 і 5, зубів 4, штовхаючої рамп 6, механізму навіски, яка з’єднана з гідравлічною системою трактора.
Корчувач Д-496А (Д — дорожна машина, 496А — модель) призначений для корчування і звезення пеньків та очищення поля.
Бульдозер універсальний Д-522 (Д — дорожна машина, 522—модель) призначений для загортання ям і траншей,
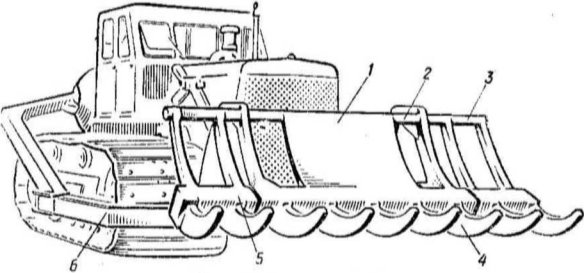
Мал, 129. Корчувач Д-695:
/—лобониО лист, ?—полиця; 3 — лівий иешнріоьмч; V —луб’я: і — пряний поширю- няч: б — штовхаючи рими
щення грунту на відстань до 200 м. Монтують на трактор , Т-180ГП; ширина захвату — до 4,5 м, заглиблення робочого органа — до 50 см.
Бульдозер складається з поворотної полиці з ножами, штовхаючої рами, двох гідравлічних циліндрів, які приводяться в рух від вала відбору потужності трактора. Кут повороту полиці регулюється гідросистемою.
Фреза болотна начіпна ФБН-09 (Ф — фреза, Б — болотна, Н — начіпна, 0,9—ширина захвату в метрах) призначена для обробітку поля, зораного чагарниково-болотними плугами на осушених болотах і перелогових землях. Крім того, її
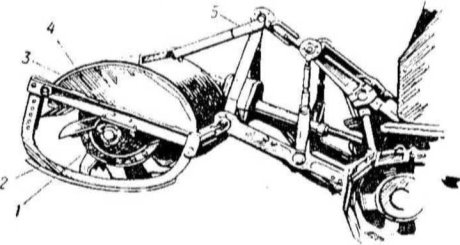
Мал. 130. Фреза болотна ФБН-0.9: /-"барабан; >—опорні поломки; 5 —кожух; / — рлми; 5 - механізм навіски.
можна використовувати для розробки дернини І вирівнювання поверхні грунту на луках і пасовищах. Глибина обробітку — 18—20 см\ продуктивність — до 0,31 га!год\ агрегатують з трактором Т-150.
Фреза ФБН-0,9 (мал. 130) складається з барабана 1 з кожухом 3, двох опорних полозків 2, рами 4, механізму навіски 5 і механізму передачі руху від вала відбору потужності трактора. Барабан складається з восьми секцій, на яких кріпляться 56 болотних ножів. Секція обладнана запобіжним механізмом, що дає змогу обходити перешкоди.
 Коток водо налив fi ий болотний ЗКВБ-1,5 (3 — трисекційний, К—коток, В—водоналивний, Б — болотний, 1,5— ширина захвату кожної секції в метрах) призначений для при- котування оброблених болотних земель — вирівнювання і ущільнення поверхні грунту.
Коток водо налив fi ий болотний ЗКВБ-1,5 (3 — трисекційний, К—коток, В—водоналивний, Б — болотний, 1,5— ширина захвату кожної секції в метрах) призначений для при- котування оброблених болотних земель — вирівнювання і ущільнення поверхні грунту.
Ширина захвату — 4,2 ж; суха вага — 2445 кгс; вага заповненого котка 7545 кгс. Агрегатують з трактором Т-150.
4. Узагальнення нових знань(4 хв)
Розкрити спектр думок по заданій темі
5. Домашнє завдання (1 хв)
Вивчити даний матеріал .Розширити свої знання по темі використавши матеріали інтернет ресурсів
МАШИНИ ДЛЯ ЗАГОТІВЛІ КОРМІВ
МАШИНИ ДЛЯ ЗАГОТІВЛІ СІНА І СИЛОСУ
ПЛАН-КОНСПЕКТ УРОКУ
ТЕРМІН ЧАСУ 2ГОД (1+1)
Тема : 31. Технологія робіт і система машин
для кормодобування. 32.Косарки
Навчальна дисципліна: Сільськогосподарські машини
Урок№ 40__ Дата проведення __________ Група ________
Мета навчального заняття:
* продовжити вивчення методів і прийомів виконання механізованих робіт у сільському господарстві та шляхів і засобів підвищення родючості ґрунтів.
Навчальна:
* сприяти збагаченню знань учнів про сільськогосподарське виробництво;
* сприяти активізації їх розумової діяльності;
* створювати умови для встановлення зв'язку теорії з практикою, з життєвими явищами і виробничими процесами.
Розвиваюча:
* продовжити розвиток умінь, пов'язаних зі сприйняттям і аналізом джерел;
* сприяти розвитку спостережливості і самостійного осмислювання окремих зв'язків, відносин, ознак між собою;
* продовжити виховання навичок культури мовного спілкування;
Виховна:
* продовжити виховання позитивного ставлення до професії Тракторист;
* сприяти формуванню глибокого пізнавального та емоційного інтересу до сільськогосподарського виробництва;
* сприяти прояву задоволеності своєю діяльністю.
Методи навчання:
• словесний;
• дослідний;.
Форма проведення уроку: комбінована
Форма навчальної діяльності: фронтальна, групова, Індивідуальна.
Засоби навчання:
* роздатковий матеріал;
* слово викладача;
• маркер;
• дошка.
• мультимедійний проектор
• компьютер
Хід уроку:
Організаційна діяльність викладача:
1. Організаційний момент (5 хв)
Підготувати учнів до роботи
2. Цілепокладання, мотивація (5 хв)
Спонукати до активного сприйняття і осмислювання матеріалу, викликати інтерес і активність, створити творчу атмосферу колективної роботи.
Визначити тему, цілі і завдання уроку
3. Вивчення нового матеріалу(30 хв)
КОНСПЕКТ УРОКУ
31. Технологія робіт і система машин
для кормодобування
Технологія збирання трав на сіно залежить від кліматичних І природних умов., На території нашої країни є три грунтово- кліматичні зони: південно-степова, степова і лісо-лукова.
У південно-степовій зоні скошують трави і водночас роблять валки. Коли трава підсохне, її збирають з валків у великі копиці чи стоги або пресують у тюки.
У степовій зоні скошують трави в покоси, після підсихання згрібають у валки, а потім через 2—3 дні збирають у копиці, стоги або пресують у тюки.
Лісо-лукова зона відзначається нерівним, пересіченим рельєфом, значною кількістю опадів та пониженою температурою в період збирання трав на сіно. Тому в цій зоні трави скошують у покоси, згрібають у валки, перевертають валки під час просушування, збирають у невеликі копиці або на спеціальні вішала, стогують на полі, звозять стоги до ферми І скиртують.
Щоб забезпечити високу якість і зниження собівартості кормів, підвищення продуктивності праці і зменшення втрат вирощеного врожаю, застосовують комплексну механізацію робіт, тобто використовують системи машин, які послідовно виконують усі роботи. Систему машин вибирають залежно від грунтово-кліматичної зони. У південно-степовій зоні використовують валкові косарки або звичайні косарки в агрегаті з поперечними граблями, підбирачі-копнувачі для збирання сіна у великі копиці або прес-підбирачі для підбирання сіна з валків з одночасним пресуванням, стогоклади, якшо сіно скиртується непресова- не; у степовій зоні — прості сінокосарки, граблі, волокуші, стогоклади, прес-підбирачі; у лісо-луковій зоні — прості сінокосарки, граблі поперечні, граблі-ворушилки, волокуші, коповози, стогоклади, установки для штучного досушування сіна.
Технологія заготівлі силосних кормів: скошування зеленої маси, подрібнення її, завантаження в силосні споруди або на спеціальні площадки і трамбування. Зелену масу для силосування збирають двома способами — роздільним і комбайновим. При роздільному способі масу скошують звичайними сінокосарками, потім згрібають і звозять для подрібнення до силосорізок, які працюють на стаціонарі біля силосних споруд.
При комбайновому способі збирання зелену масу скошують, подрібнюють і навантажують на транспортні засоби косарками- подрібнювачами або силосозбиральними комбайнами. Для завантаження силосних споруд застосовують самоскиди і різні навантажувальні елеватори. Подрібнену масу утрамбовують спеціальними трамбувальниками, а на відкритих площадках — гусеничним трактором.
Головні вимоги, що ставляться до заготівлі кормів: забезпечення максимального збирання біологічного врожаю трав або інших культур, вирощених на силос, збереження їх поживних якостей протягом усього періоду зберігання.
Скошувати трави починають у період цвітіння, а злакових— на початку колосіння, коли вони мають найбільше поживних речовин. Закінчувати збирання сіна слід за 10—12 днів. Не можна пересушувати сіно в покосах і валках, бо при згрібанні обламуються і втрачаються листя і квітки. Висота зрізання трав — 6—8 см. Вологість сіна при скиртуванні — 15—17%, а при пресуванні — не більш як 12—15%.
Силосування на відміну від сінозбирання менше залежить від метеорологічних умов. При силосуванні зеленої соковитої маси скошувати, подрібнювати і трамбувати треба безперервно: вся скошена маса має бути засилосована в той самий день. Утрамбовувати слід щільно, щоб значна частина повітря вийшла з подрібненої маси. Заповнювати силосні споруди треба так, щоб за день ущільнений шар був не менш як 2 м.
32. Косарки
За видом тяги косарки поділяють на кінні, тракторні і самохідні; за способом з’єднання з тягою — на причіпні і начіпні; за технологічним процесом роботи — на прості, валкові і косар- ки-подрібнювачі. Основним і спільним робочим органом для всіх косарок є різальний апарат.
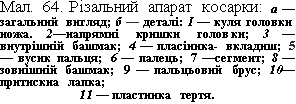
Різальний апарат складається з рухомої різальної частини— ножа і нерухомої протирізальної частини — пальців з пластин- ками-вкладишами. Ніж складається із стальної штаби, до якої приклепані сегменти 7 (мал. 64), головки з кулею /, через яку діж з’єднується з шатуном привода.
Пальці кріплять болтами з потайними головками до пальцьового бруса, який являє собою стальну штабу змінного перерізу. Сусідні пальці вусиками 5 упираються один в один і вдержуються від бічних зміщень. У напрямних прорізах пальців прикріплені пластинки-вкладиші 4, бічні грані яких загострені і мають зубцеву насічку, що допомагає тримати стебла в момент зрізання. Пластинка-вкладиш кріпиться до пальців у передній частині за допомогою вусика, а в задній — за допомогою заклепки.
Щоб сегменти ножа щільно прилягали до вкладишів, на
пальцьовому брусі закріплені притискні лапки 10. Пластинки тертя 11 удержують ніж від зміщення назад під час роботи. Вони також закріплені на пальцьовому брусі. По краях пальцьовий брус має два башмаки — внутрішній 3 і зовнішній 8. Під башмаками встановлено полозки. Під час роботи полозки повзуть по землі; змінюючи їх положення відносно башма- ків, регулюють висоту зрізання рослин.
Принцип зрізання стебел різальним апаратом подібний до принципу роботи звичайних ножиць. Якість зрізання стебел залежить від швидкості руху ножа, зазора між сегментами і протирізальними пластинами, гостроти ножа і технічного стану різального апарата в цілому.
Сегменти правильно відрегульованого ножа спираються на протирізальні пластини лише носком, а біля основи сегмента повинен бути зазор близько 1 мм. Швидкість ножа в середньому дорівнює 1,3— 1,8 місек.
![]()
![]()

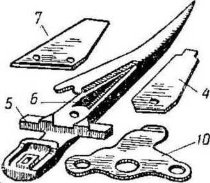 Залежно від відстані між осьовими лініями сусідніх сегментів і пальців розрізняють три типи різальних апаратів: 1) нормальний; 2) низького різання; 3) середнього різання.
Залежно від відстані між осьовими лініями сусідніх сегментів і пальців розрізняють три типи різальних апаратів: 1) нормальний; 2) низького різання; 3) середнього різання.
У різального апарата нормального типу відстань між осьовими лініями сусідніх сегментів і сусідніх пальців однакова. В апаратах низького різання відстань між осьовими лініями пальців у 2 рази менша за відстань між осьовими лініями сусідніх сегментів. В апаратах середнього різання відстань між осьовими лініями пальців менша за відстань між осьовими лініями сусідніх сегментів, але не в кратному відношенні. На косарках установлюють різальні апарати нормального типу.
Мал. 65. Косарка KC-2J:
і—рама; 2—клинопасова передача; 3—карданна передача; 4— шатун; 5—внутрішній башмак; б — ніж; 7 — зовнішній башмак.
Начіпна тракторна косарка КС-2,1 (К — косарка, С — швидкісна, 2,1—ширина захвату в метрах) призначена для скошування природних і сіяних трав. Агрегатується з тракторами Т-25, Т-40А, «Беларусь» усіх модифікацій. Робоча швидкість руху—12 кмігод, продуктивність — 2,5 га за годину чистої роботи.
Косарка КС-2,1 (мал. 65) складається з різального апарата нормального типу 6, польового і внутрішнього подільників, рами /, механізму начіпки, механізму приводу. Різальний апарат приводиться в дію від вала відбору потужності трактора. Піднімається й опускається він завдяки гідравлічній системі трактора.
Косарка КУФ-1,8 призначена для скошування або підбирання із валків злакових трав, а також бобових культур і одночасного їх подрібнення. Ширина захвату жатки—1,8 м\ підбирача — 1,7 агрегатується косарка з трактором ЮМЗ-6Л, «Беларусь» всіх модифікацій.
Робочі органи косарки: різальний апарат, транспортер, по- дрібнювач, елеватор подрібненої маси, приводяться в дію від вала відбору потужності. •
Подрібнена маса вивантажується в причіпний візок або в транспорт, шо рухається поруч косарки. Подрібнену зелену масу використовують для приготування сінажу, силосу або трав’яного борошна.
Косарка КНУ-6М (К — косарка, Н — начіпна, У — універсальна, 6 — ширина захвату в метрах, М — модернізована) призначена для скошування трав на ділянках з рівним рельє
фом. Найменша висота зрізання — 6 см, продуктивність — до 3,2 га!год\ агрегатують з тракторами ЮМЗ-6, Т-25 і «Беларусь».
Косарка (мал. 66) складається з трьох різальних апаратів, рами і механізмів для передавання руху від трактора до різальних апаратів. Два різальні апарати (нормального різання) розміщені по боках, а один фронтально, ширина захвату кожного з них 2,1 м. Для відведення зрізаної трави до середини на польових полозках (а в переднього різального апарата на обох полозках) кріплять відкидні дошки з круглими стержнями. Ножі бічних різальних апаратів приводяться в дію від вала відбору потужності трактора через ланцюгову передачу, карданний і колінчастий вали та шатуни. Ніж фронтального різального апарата приводиться в дію від вала відбору потужності трактора через коробку передач.
Висоту зрізання регулюють, переставляючи полозки*відносно башмаків пальцьового бруса. Різальні апарати піднімають і опускають за допомогою гідравлічної системи трактора. Якщо трактор обладнаний роздільно-агрегатною гідравлічною системою з виносними циліндрами, то кожний різальний ап'арат можна підняти окремо, а коли трактор обладнаний гідравлічною системою типу НС-37 без розподільника і виносних циліндрів, то всі три різальні апарати піднімають і опускають разом. Під час транспортування косарки різальні апарати піднімають і прикріплюють до рами трактора розтяжними прутами. Раму косарки разом з різальними апаратами кріплять до лонжеронів трактора, що дає змогу від’єднувати косарку від трактора, не розбираючи її.
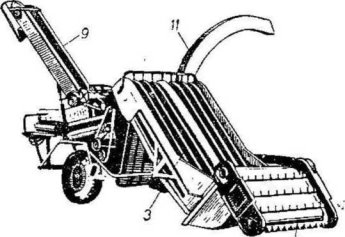
Косарка -подрібнювач КИК-1,4 (К — косарка, И — подрібнювач, К — кормів, 1,4 — ширина захвату в метрах) призначена для скошування зеленої маси, подрібнення її і наванта-
Мал. 66. Косарка КНУ-6М.
I
Мал. 67. Косарка-подрібнювач КИК-1,4:
I — різальний апарат; 2 — мотовило; 3—планчастий транспортер: 4—притискний бітер;
5 — опорне колесо; 6 — вивантажувальна труба; 7—диск; 8 — живильні вальці.
ження на транспортні засоби. Можна також використовувати косарку на стаціонарних роботах для подрібнення грубих сухих і соковитих кормів. Висота зрізання—5—7 см; продуктивність— 1,1 га/год\ агрегатують з трактором «Беларусь», обслуговує один тракторист.
Косарка КИК-1,4 (мал. 67) складається з подрібнювана, рами, механізму начіпки, механізму передавання руху від вала відбору потужності трактора і змінних приставок — різального апарата /, мотовила 2, транспортера 5, притискного бітера 4, які встановлюють під час збирання низькостеблих культур, та лотка силосорізки для роботи на стаціонарі.
Робочі органи подрібнювального апарата — живильні вальці 8 і диск 7 із закріпленими на ньому ножами і лопатями. Лопаті створюють під час роботи струмінь повітря, який подає подрібнену масу через трубу 6 в транспортні засоби. Диск може мати 2—3 або шість ножів.
4. Узагальнення нових знань(4 хв)
Розкрити спектр думок по заданій темі
5. Домашнє завдання (1 хв)
Вивчити даний матеріал .Розширити свої знання по темі використавши матеріали інтернет ресурсів
ПЛАН-КОНСПЕКТ УРОКУ
ТЕРМІН ЧАСУ 2ГОД (1+1)
Тема : 33. Граблі .34. Волокуші і підбирачі
Навчальна дисципліна: Сільськогосподарські машини
Урок№_41__ Дата проведення __________ Група ________
Мета навчального заняття:
* продовжити вивчення методів і прийомів виконання механізованих робіт у сільському господарстві та шляхів і засобів підвищення родючості ґрунтів.
Навчальна:
* сприяти збагаченню знань учнів про сільськогосподарське виробництво;
* сприяти активізації їх розумової діяльності;
* створювати умови для встановлення зв'язку теорії з практикою, з життєвими явищами і виробничими процесами.
Розвиваюча:
* продовжити розвиток умінь, пов'язаних зі сприйняттям і аналізом джерел;
* сприяти розвитку спостережливості і самостійного осмислювання окремих зв'язків, відносин, ознак між собою;
* продовжити виховання навичок культури мовного спілкування;
Виховна:
* продовжити виховання позитивного ставлення до професії Тракторист;
* сприяти формуванню глибокого пізнавального та емоційного інтересу до сільськогосподарського виробництва;
* сприяти прояву задоволеності своєю діяльністю.
Методи навчання:
• словесний;
• дослідний;.
Форма проведення уроку: комбінована
Форма навчальної діяльності: фронтальна, групова, Індивідуальна.
Засоби навчання:
* роздатковий матеріал;
* слово викладача;
• маркер;
• дошка.
• мультимедійний проектор
• компьютер
Хід уроку:
Організаційна діяльність викладача:
1. Організаційний момент (5 хв)
Підготувати учнів до роботи
2. Цілепокладання, мотивація (5 хв)
Спонукати до активного сприйняття і осмислювання матеріалу, викликати інтерес і активність, створити творчу атмосферу колективної роботи.
Визначити тему, цілі і завдання уроку
3. Вивчення нового матеріалу(30 хв)
КОНСПЕКТ УРОКУ
33. Граблі
Для згрібання трави безпосередньо за косарками або після підсихання її застосовують граблі. За видом тяги граблі поділяють на кінні і тракторні, а за технологічним процесом — на поперечні і бічні. Поперечні граблі при згрібанні трави утворюють валки впоперек напряму руху, а бічні укладають траву в безперервний валок з боку грабель, паралельно напряму руху агрегату.
Граблі ГП-14 (Г — граблі, П — поперечні, 14 — ширина захвату в метрах) призначені для згрібання прив'ялої або сві- жоскошеної трави у валки. Продуктивність — до 7 га!год\ агрегатують з тракторами ДТ-20, Т-25 або Т-40.
Граблі ГП-14 (мал. 68) складаються з трьох секцій, шарнірно з’єднаних між собою і встановлених на чотири пневматичні колеса. Крайні колеса самоустановні. Для переведення грабель у транспортне положення крайні секції заводять уперед, прикріплюють до сниці і встановлюють кожну з них на додаткове транспортне колесо. Середня секція має ширину захвату 6 м і може бути використана сама при згрібанні трав на невеликих ділянках або на ділянках з нерівним рельєфом.
Грабельний апарат складається з шести брусів з дугоподібними пружинними стальними зубами, прутиків-чистикїв і рами. Бруси із зубами прикріплені шарнірно до рами і з’єднані тягами з храповими автоматами механізму піднімання. Прутики-чисти- ки жорстко прикріплені до рами. Під час роботи граблів зуби, опущені на землю, згрібають траву або сіно з покосів доти, поки не буде включено підйомний механізм. Після включення храпових автоматів через систему тяг і кронштейнів брус із зубами повертається, піднімаючись вгору, а сіно залишається на землі поперечним валком. Прутики-чистики очищають зуби від сіна. За один півоберт ходових коліс зуби піднімають, а за другий

Мал. 68. Поперечні тракторні граблі ГП-14.
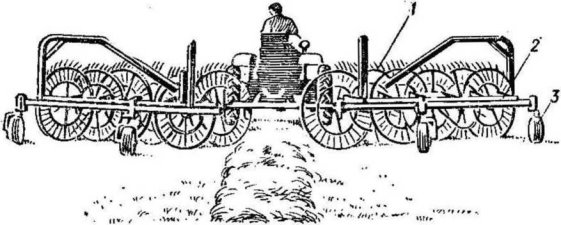
Мал. 69. Граблі-валкоутворювачі ГВК-6,0;
1 — пальцеві колеса; 2 — рама; З — котки.
півоберт опускають на землю. При транспортуванні граблів брус із зубами в піднятому положенні вдержують спеціальні прути з гачками.
. Залежно від урожайності трав зуби можна встановлювати на. відстані 48, 72 і 96 мм один від одного.
Г р а б л і-в а л коу т ворюва чі ГВК-6,0 (Г — граблі, В — валкоутворювачі, К—колісно-пальцеві, 6,0 — ширина захвату в лї) призначені для згрібання прив’ялої трави з покосів у валки, ворушіння та перевертання валків сіна під час його сушіння. Агрегатується з тракторами Т-25, Т-40А, «Беларусь» усіх модифікацій. Продуктивність — до 5,4 га за годину чистої роботи. ~ Граблі-валкоутворювачі (мал. 69) складаються з двох секцій, кожна з яких може працювати окремо. Робочими органами є пальцеві колеса 1. Вони обертаються внаслідок зчеплення їх із. стернею і підгрібають траву, утворюючи поздовжній валок або розворушують сіно в валку. Рама секції 2 розміщена на самоустановних котках 3. Це сприяє добрій маневреності граблів при обслуговуванні одним трактористом.
34. Волокуші і підбирачі
Для збирання сіна з валків у невеликі копиці застосовують волокуші і підбирачі-копнувачі. Якщо вологість сіна у валках не перевищує 15%, тоді можна застосовувати прес-підбирачі для підбирання сіна з валків з одночасним пресуванням.
Волокуша ВНШ-3,0 (В — волокуша, Н — начіпна, Ш — самохідне шасі, 3,0 — ширина захвату в метрах) призначена для збирання сіна з валків у копиці і для звезення його до місця скиртування. Вантажопідйомність волокуші—300 кг; навішують її на самохідне шасі Т-16Л4.
Волокуша (мал. 70) складається з грабельної решітки /,ло-
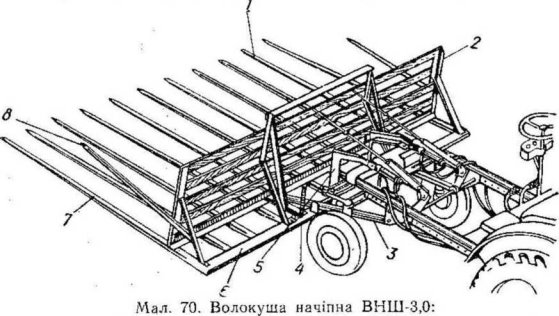
/ — грабельна репіі'іка: 2— лобова стінка; 3 — тяга; 4—пружини; 5 — кронштейн, 6 —• поперечна планка; 7 і 8— пальці.
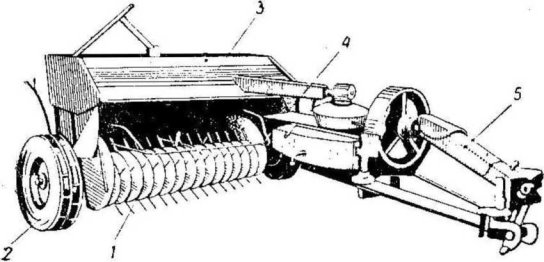
Мал. 71. Прес-підбирач ПСБ-1,6:
і — оідбиральннй механізм; 2—ходові колеса; 3 — пресувальна камера; 4 — в'язальний апарат; 5—механізм привода.
бової стінки 2 з кронштейнами і тягами, амортизуючих притискних пружин 4, пальців для кріплення штовхаючих брусів, механізму начіпки і кронштейнів, які з’єднуються з штоками гідравлічних циліндрів механізму підйому трактора.
Грабельна решітка складається з поперечної планки 6, до якої прикріплені 11 металевих пальців 7. З боків решітка обмежена двома короткими металевими пальцями, які вдержують сіно від спадання з решітки.
Для підбирання сіна агрегат рухається вздовж валка з опущеною грабельною решіткою. Коли решітка заповниться сіном, грабельний апарат піднімають і перевозять до потрібного місця. Вивантажують сіно з грабельної решітки, коли вона в опущеному положенні, під час руху машини назад.
Прес-підбирач ПСБ-1,6 (П — прес, С — сіна, Б—бічна подача, 1,6 — ширина захвату в метрах) призначений для підбирання сіна або соломи з валків, пресування у тюки і перев’язування дротом. Можна також використовувати його на стаціонарі для пресування сіна або соломи. Продуктивність — до 7 т!год\ агрегатують з тракторами «Беларусь», Т-40 і Т-40А, обладнаними подовжувачами вала відбору потужності.
Прес-підбирач ПСБ-1,6 (мал. 71) складається з підбирача /, подавального механізму з пакувальниками, пресувальної камери З, в’язального апарата 4, механізму передавання руху віа вала відбору потужності трактора, ходової частини. Підбирач барабанного типу, пальчиковий. Кріпиться на пружинних підвісках, що забезпечує копіювання мікрорельєфу поля. У транспортне і робоче положення переводять за допомогою важільного механізму.
У процесі роботи підбирач піднімає сіно з валків і передає до подавального механізму. Пакувальники підпресовують і спря
мовують сіно в пресувальну камеру під поршень пресувальника, який виконує поступально-зворотний рух у камері і за кожним ходом ущільнює захоплену порцію сіна. Коли щільність тюка досягає встановленої величини, в роботу включається в’язальний апарат, який за допомогою двох голок і вузлов’язів зв’язує тюк одночасно в двох місцях. Механізм для регулювання щільності пресування тюка установлено в задній частині пресувальної камери. Для обрізання кінців сіна з боків тюка в пресувальній камері встановлені протирізальні пластини, а на боках поршня — ножі; зазор між ними не більш як 0,8 мм.
Подача сіна в камеру пресування бічна. Розмір спресованого тюка (слі): ширина —50, висота — 36, довжина — 80—100.
4. Узагальнення нових знань(4 хв)
Розкрити спектр думок по заданій темі
5. Домашнє завдання (1 хв)
Вивчити даний матеріал .Розширити свої знання по темі використавши матеріали інтернет ресурсів
ПЛАН-КОНСПЕКТ УРОКУ
ТЕРМІН ЧАСУ 2ГОД (1+1)
Тема : 35 Стогосклади.
Навчальна дисципліна: Сільськогосподарські машини
Урок№__43 Дата проведення __________ Група ________
Мета навчального заняття:
* продовжити вивчення методів і прийомів виконання механізованих робіт у сільському господарстві та шляхів і засобів підвищення родючості ґрунтів.
Навчальна:
* сприяти збагаченню знань учнів про сільськогосподарське виробництво;
* сприяти активізації їх розумової діяльності;
* створювати умови для встановлення зв'язку теорії з практикою, з життєвими явищами і виробничими процесами.
Розвиваюча:
* продовжити розвиток умінь, пов'язаних зі сприйняттям і аналізом джерел;
* сприяти розвитку спостережливості і самостійного осмислювання окремих зв'язків, відносин, ознак між собою;
* продовжити виховання навичок культури мовного спілкування;
Виховна:
* продовжити виховання позитивного ставлення до професії Тракторист;
* сприяти формуванню глибокого пізнавального та емоційного інтересу до сільськогосподарського виробництва;
* сприяти прояву задоволеності своєю діяльністю.
Методи навчання:
• словесний;
• дослідний;.
Форма проведення уроку: комбінована
Форма навчальної діяльності: фронтальна, групова, Індивідуальна.
Засоби навчання:
* роздатковий матеріал;
* слово викладача;
• маркер;
• дошка.
• мультимедійний проектор
• компьютер
Хід уроку:
Організаційна діяльність викладача:
1. Організаційний момент (5 хв)
Підготувати учнів до роботи
2. Цілепокладання, мотивація (5 хв)
Спонукати до активного сприйняття і осмислювання матеріалу, викликати інтерес і активність, створити творчу атмосферу колективної роботи.
Визначити тему, цілі і завдання уроку
3. Вивчення нового матеріалу(30 хв)
КОНСПЕКТ УРОКУ
35. Стогоклади
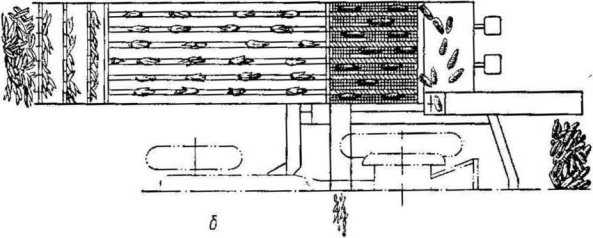
Для підвезення копиць сіна до місця стогування і подавання його на стоги застосовують стогоклади. Найпоширеніші шарнірно-важільні і універсальні стогоклади, які використовують не тільки для подавання сіна і соломи на стоги, а й для навантаження таких сипких матеріалів, як гній, торф, щебінь, зерно та ін.
![]()
![]()
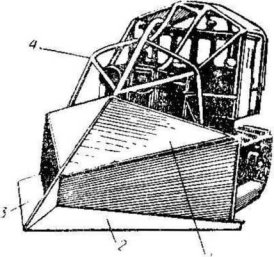
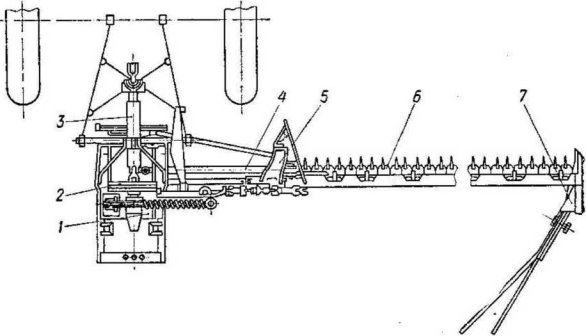
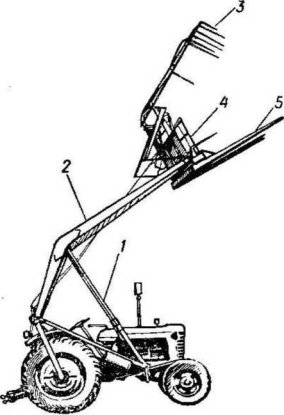 Стогоклад СНУ-0,5 (С — стогоклад, Н — начіпний, У — універсальний, 0,5 — вантажопідйомність в тоннах) призначений для подавання соломи і сіна на стоги і транспортні засоби, а також для навантаження гною, силосу, зерна та роботи на будівництві.
Стогоклад СНУ-0,5 (С — стогоклад, Н — начіпний, У — універсальний, 0,5 — вантажопідйомність в тоннах) призначений для подавання соломи і сіна на стоги і транспортні засоби, а також для навантаження гною, силосу, зерна та роботи на будівництві.
Продуктивність — 10 т/год при подаванні сіна; максимальна висота піднімання — 7 ж; навішують на трактор «Беларусь».
Основні вузли стогоклада СНУ-0,5 (мал. 72): змінний робочий орган, зварна рама 2, гідравлічні циліндри 1. У комплекті до стогоклада додають такі робочі органи, як грабельна решітка 5 з вивантажувальною стінкою 4 і захватним пристроєм З для подавання сіна і соломи; вила для навантаження силосу і гною; стріла для виконання піднімальних робіт на будівництві;, ківш для зерна та Інших сипких вантажів; гак для піднімання штучних вантажів.
На грабельну решітку сіно набирають тоді, коли вона в опущеному положенні, а виштовхувальна стінка в крайньому задньому положенні. Для скидання сіна з решітки на скирту або в кузов машини раму з грабельною решіткою піднімають, включають виносний гідравлічний циліндр, шток якого переміщує виштовхувальну стінку вздовж горизонтальних пальців решітки і згортає з неї сіно. Щоб сіно не падало при підніманні, грабельні решітки обладнують (з 1962 р.) притискною рамкою. Удосконалення грабельної решітки захватним пристроєм у вигляді рамки з кігтями допомагає відділити порції сіна або соломи, набрані з копиці, і краще використати об’єм грабельної решітки. Рамка захватного пристрою зблокована з виштовху- вальною стінкою і шарнірно з’єднана з рамою піднімання. При набиранні соломи на решітку рамку піднімають, а виштовхувальна стінка перебуває в крайньому задньому положенні. При підніманні грабельної решітки рамку захватного пристрою опускають; кігті її відділяють від загальної маси порцію соломи, яка вмістилася на грабельній решітці. Шарнірні важелі в міру піднімання рами з грабельною решіткою піднімають рамку захватного пристрою. На потрібній висоті (після 3 м) включають у роботу виносний циліндр виштовхувальної стінки, яка вільно і повністю вигортає солому з решітки.
4. Узагальнення нових знань(4 хв)
Розкрити спектр думок по заданій темі
5. Домашнє завдання (1 хв)
Вивчити даний матеріал .Розширити свої знання по темі використавши матеріали інтернет ресурсів
ПЛАН-КОНСПЕКТ УРОКУ
ТЕРМІН ЧАСУ 2ГОД (1+1)
Тема : 36. Силосозбиральні комбайни.
Підтема 37. Підготовка до роботи сінозбиральних.
і силосозбиральних машин та організація їх роботи
Навчальна дисципліна: Сільськогосподарські машини
Урок№_43 Дата проведення __________ Група ________
Мета навчального заняття:
* продовжити вивчення методів і прийомів виконання механізованих робіт у сільському господарстві та шляхів і засобів підвищення родючості ґрунтів.
Навчальна:
* сприяти збагаченню знань учнів про сільськогосподарське виробництво;
* сприяти активізації їх розумової діяльності;
* створювати умови для встановлення зв'язку теорії з практикою, з життєвими явищами і виробничими процесами.
Розвиваюча:
* продовжити розвиток умінь, пов'язаних зі сприйняттям і аналізом джерел;
* сприяти розвитку спостережливості і самостійного осмислювання окремих зв'язків, відносин, ознак між собою;
* продовжити виховання навичок культури мовного спілкування;
Виховна:
* продовжити виховання позитивного ставлення до професії Тракторист;
* сприяти формуванню глибокого пізнавального та емоційного інтересу до сільськогосподарського виробництва;
* сприяти прояву задоволеності своєю діяльністю.
Методи навчання:
• словесний;
• дослідний;.
Форма проведення уроку: комбінована
Форма навчальної діяльності: фронтальна, групова, Індивідуальна.
Засоби навчання:
* роздатковий матеріал;
* слово викладача;
• маркер;
• дошка.
• мультимедійний проектор
• компьютер
Хід уроку:
Організаційна діяльність викладача:
1. Організаційний момент (5 хв)
Підготувати учнів до роботи
2. Цілепокладання, мотивація (5 хв)
Спонукати до активного сприйняття і осмислювання матеріалу, викликати інтерес і активність, створити творчу атмосферу колективної роботи.
Визначити тему, цілі і завдання уроку
3. Вивчення нового матеріалу(30 хв)
КОНСПЕКТ УРОКУ
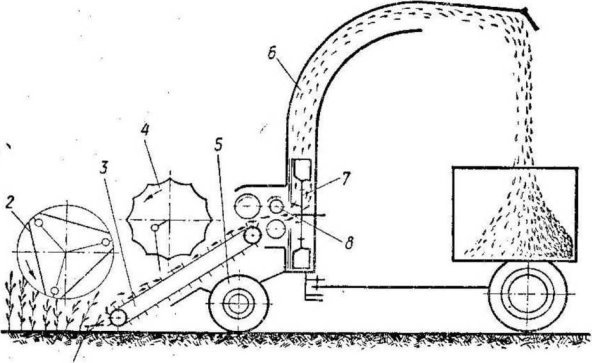
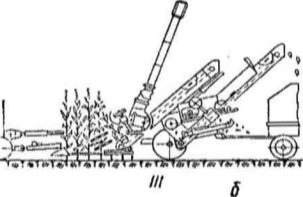
36. Силосозбиральні комбайни
Силосозбиральний комбайн КС-2,6 призначений для скошування і подрібнення на силос сільськогосподарських, культур, посіяних рядковим або квадратно-гніздовим способом.
Агрегатують комбайн з тракторами Т-74, «Беларусь».
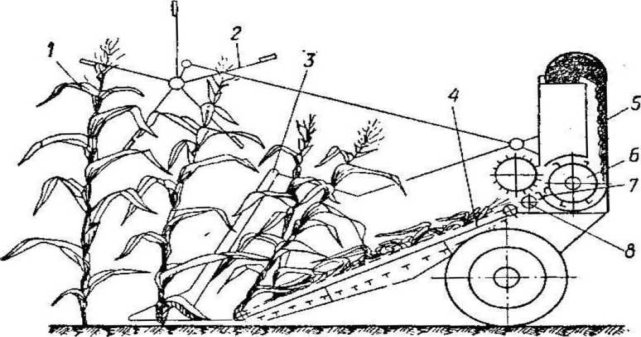
Комбайн КС-2,6 (мал. 73) складається з‘ внутрішнього // і польового 3 подільників, різального апарата 13, мотовила 2,. гіланчастого транспортера 12, живильного барабана 9, ножового- барабана 6, протирізальної пластини 7, живильного вальця 8, вивантажувального транспортера 10, рами, ходових коліс, механізму привода робочих органів від вала відбору потужності трактора.
Різальний апарат косаркового типу, сегментний, із зміцненими пальцями, що зумовлено товщиною стебел кукурудзи і соняшника.
Подрібнювач стебел складається з ножового барабана з піддоном і протирізальної пластини. Ножі на барабані закріплені по спіралі, що дає можливість зменшити зусилля різання і рівномірно навантажувати вал ножового барабана. Щоб запобігти під час різання появі додаткових сил уздовж вала барабана, ножі виготовляють роз’ємними і закріплюють почергово- праві і ліві.Зазор між лезами ножів барабана і протирізальною 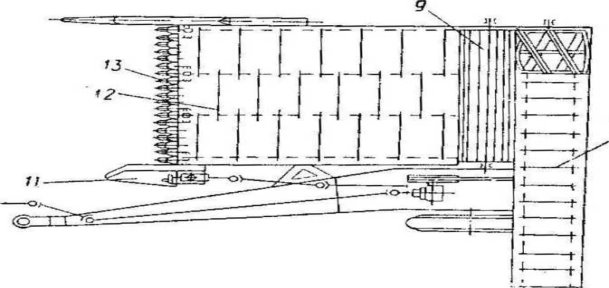
пластиною— 2 мм, він регулюється переміщенням барабана.
Мал. 73. Схема роботи комбайна КС-2,6:
/ — стебло кукурудзи; 2— мотовило; 3—польовий подільник; 4—плат-
форма жатки; 5—силосопр овід; б — ножовий барабан; 7 — лротнрізаль-
на пластина; S —живильний валець; 9— живильний барабан; 10 — ви-
вантажувальний транспортер; // — внутрішній подільник; 12— планча-
стий транспортер; ІЗ—різальний апарат.
Транспортер подрібненої маси ланцюгово-планчастий, закритий кожухом з нарощеним рукавом, що запобігає втратам силосної маси під час навантаження на транспортні засоби.
Комбайн КС-2,6 працює так (мал. 73). Під час робочого руху в загінці подільники 11 і 3 відділяють стебла, а мотовило2 нахиляє їх до різального апарата 13. Після зрізання мотовило укладає стебла на транспортер 12, який подає їх вершинами вперед до живильного апарата. Живильний барабан І валець стискують стебла і тримають їх у момент різання подрібнювальним апаратом. Подрібнена маса відкидається по силосопро- воду на вивантажувальний транспортер, який подає її в кузов автомобіля або на причіп трактора, що рухається поруч з комбайном.
Усі робочі органи комбайна, крім мотовила, приводяться в рух від вала відбору потужності трактора. Мотовило приводиться в рух від лівого ходового колеса комбайна ланцюговою передачею.
Для переведення жатки з робочого в транспортне положення і навпаки, а також для піднімання і опускання мотовила на комбайні встановлено гідравлічний механізм.
Самохідний силосозбиральний комбайн КС Г-3,2 призначений для збирання на силос кукурудзи, соняшника та інших культур, які вирощують на грунтах підвищеної вологості. Ширина захвату — 3,2 м, робоча швидкість — до 7,0 кмігод.
Комбайн складається з гусеничної ходової частини від самохідного комбайна СКГ-4, жатки і подрібнювального апарата, уніфікованих з цими самими вузлами комбайна СК-2,6, бункера з вивантажувальним транспортером для подрібненої маси.
Крім цих комбайнів, для збирання кукурудзи та інших культур на силос застосовують універсальний кукурудзосилосозби- ральний комбайн УКСК-2.6А.
37. Підготовка до роботи сінозбиральних*
і силосозбиральних машин та організація їх роботи
Підготовка машин до роботи полягає в перевірці їх технічного стану, виявленні і своєчасному усуненні неполадок, регулюванні робочих вузлів і механізмів, мащенні підшипників та інших тертьових поверхонь деталей.
Під час перевірки косарок особливу увагу треба звернути на справність різального апарата і транспортерів, мотовила, подрібнювана, якщо вони є, на дію механізмів підіймання і передавання руху.
Різальний апарат повинен працювати без зайвих шумів і заїдання, без пропусків непідрізаних стебел. Для цього треба, щоб сегменти ножа і протмрізальні пластини пальців були гострі, без тріщин і зазублин і міцно прикріплені на своїх місцях, передні кінці сегментів щільно прилягали до протирізальних •пластин, а в основі був зазор до 1 мм.. Зазор між притискними лапками і ножем повинен бути не більш як 0,2—0,3 мм. Ніжвстановлюють так, щоб у крайніх положеннях його осьові лінії сегментів збігалися з осьовими лініями пальців. Пальцьовий брус установлюють із забіганням зовнішнього башмака відносно внутрішнього на 35—60 мм (у косарок з бічним розміщенням різального апарата).
У косарок, які мають транспортери, перевіряють міцність кріплення планок до полотна або до ланцюгів, натяг транспортера, звертаючи увагу на те, щоб не було перекосу і щоб він працював без буксування і надмірного натягу. У мотовила перевіряють технічний стан його планок і підшипників вала. Установлюють мотовило в положення, яке відповідає висоті культури безпосередньо на ділянці. Під час збирання високо- стеблих культур (кукурудзи, соняшника та ін.) мотовило встановлюють по висоті так, щоб планки його торкалися стебла на 2/з його висоти (від землі).
У косарок-подрібнювачів перевіряють міцність кріплення ножів барабана і деки, регулюють зазор між ними (не більше ' як 1 мм}.
Під час перевірки механізму підіймання звертають увагу на те, щоб він працював безвідказно і швидко. Уіеханізми, які мають ручний привод, повинні діяти від зусилля 8—10 кас на важелі підіймання. Цього можна добитися, змінюючи натяг амортизаційних пружин. Тиск на зовнішні полозки різального апарата при цьому не повинен перевищувати 6—8 кгс.
При перевірці граблів особливу увагу слід звернути на правильність форми зуба, на рівномірність густоти зубів, на дію механізму підіймання. У граблів з пальцьовим грабельним апаратом перевіряють міцність пальців, пружність їх, кут нахилу до горизонту, роботу механізму передачі руху до грабельного, апарата, розміщення і кріплення секцій до зчіпки.
Підготовляючи волокушу до роботи, треба добитися, щоб усі пальці грабельної решітки були міцно закріплені, лежали в одній площині і на однаковій відстані один від одного., В опущеному положенні кінці пальців повинні торкатися землі, а під час руху не зариватися. Таке регулювання здійснюють, змінюючи стиск амортизаційних пружин.
У підбирачів-копнувачів перевіряють стан пальців барабана, тиск полозків на землю (не більш як 5—6 кас), міцність кріплення планок транспортера і натяг його, роботу механізму закривання дна і клапана камери; при потребі регулюють довжину тяг, зрівноважують дно камери за допомогою тягарів так, щоб під час вивантаження копиці воно вільно перекидалося, а після вивантаження поверталося в початкове положення. У прес-иідбпрачів перевіряють роботу і регулювання автомата пресувальної камери і в’язального апарата.
Підготовка поля до роботи. Підготовку поля до роботи косарок та інших сінозбиральних машин починають, ранньою весною. З ділянки прибирають рештки сіна та іншісторонні предмети, зарівнюють ями, канави, купину, кротовиння тощо Ртам, де потрібно, підсівають траву.
Перед початком збирання трав оглядають ділянку, позначають віхами перешкоди, яких не можна було усунути, складають коротку характеристику ділянки, зазначаючи її розміри, сорт трави, урожайність, стан під’їзних доріг. На основі цих даних складають план-маршрут роботи агрегату. Потім визначають напрям його руху, розбивають поле на загінки. Довжина загінки повинна бути в 6—8 раз більша, від її ширини. Для косарок з бічним розміщенням різального апарата роблять прокоси між ділянками.
Напрям руху агрегату під час скошування трав має збігатися з довшою стороною загін-ки і з напрямом оранки на ділянках, засіяних травами. Під час косіння на схилах агрегат повинен рухатись упоперек схилу. Для агрегату з поперечними граблями напрям руху вибирають упоперек покосів, а з бічними— вздовж покосів. Напрям руху агрегатів з волокушами •і підбирачами має збігатися з довжиною валків.
Організація роботи сінозбиральних агрегатів. На початку роботи агрегату в полі остаточно перевіряють ■справність машин і правильність регулювання їх робочих -органів.
Косарками з фронтальним розміщенням різального апарата трави косять човниковим способом, а з бічним розміщенням — круговим. При заїзді косарки в загінку опускають різальний апарат і включають передачу руху приблизно за 1 м до початку загінки, щоб ніж міг набрати нормальної швидкості.
Працювати в загінці треба на повну ширину захвату, не допускаючи огріхів, стежачи за прямолінійністю руху і додержуючи встановленої висоти зрізання. Працювати треба на найвищих швидкостях, які допускає рельєф поля і стан культури, яку збирають. Не рекомендується косити траву, коли є велика роса і відразу після дощу, оскільки при цьому забиватиметься різальний апарат.
Працюючи з граблями, волокушами І підбирачами, стежать за правильністю форми і прямолінійністю розставляння копиць, за чистотою підбирання сіна. Згрібаючи сіно поперечними граблями, застосовують коловий спосіб руху, а бічними граблями, волокушами та підбирачами — човниковий спосіб.
Організація роботи під час силосування. Незалежно від того, де силосують — у силосних баштах, траншеях, ямах чи в надземних силососховищах із застосуванням щитів, ■слід додержувати зоотехнічних вимог до технологічного процесу закладання силосу. Зелену масу подрібнюють на довжину різки ЗО—40 мм, щоб поліпшити виділення соку і прискорити відповідні біологічні процеси під час бродіння. Подрібнену масу закладають і ущільнюють безперервним потоком відразу після скошування. Ущільнюють так, щоб у силосній масі не залиша-
лося повітря. Не слід допускати забруднення силосної маси. Закладену силосну масу надійно захищають від доступу повітря і дощу.
Техніка безпеки. Під час роботи на сінозбиральних і силосозбиральних машинах слід бути особливо обережним з їх обертовими деталями і стежити,. щоб на них були захисні кожухи. При підніманні різального апарата в транспортне положення вручну або при зніманні ножа пальцьовий брус треба брати так, щоб пальці руки не потрапили під сегменти ножа. Перевіряючи технічний стан косарок, грабель, підбирачів і стогокладів, силосозбиральних комбайнів, слід обов’язково відключати передачу руху. Забороняється перебувати під грабельним апаратом або під ковшем стогоклада під час їх роботи.
4. Узагальнення нових знань(4 хв)
Розкрити спектр думок по заданій темі
5. Домашнє завдання (1 хв)
Вивчити даний матеріал .Розширити свої знання по темі використавши матеріали інтернет ресурсів
ПЛАН-КОНСПЕКТ УРОКУ ЛПЗ
ТЕРМІН ЧАСУ 1 ГОД.
Тема : Вивчення будови косарок та їх регулювання.
Навчальна дисципліна: Сільськогосподарські машини
Урок№__44_ Дата проведення __________ Група ________
Мета навчального заняття:
* продовжити вивчення методів і прийомів виконання механізованих робіт у сільському господарстві та шляхів і засобів підвищення родючості ґрунтів.
Навчальна:
* сприяти збагаченню знань учнів про сільськогосподарське виробництво;
* сприяти активізації їх розумової діяльності;
* створювати умови для встановлення зв'язку теорії з практикою, з життєвими явищами і виробничими процесами.
Розвиваюча:
* продовжити розвиток умінь, пов'язаних зі сприйняттям і аналізом джерел;
* сприяти розвитку спостережливості і самостійного осмислювання окремих зв'язків, відносин, ознак між собою;
* продовжити виховання навичок культури мовного спілкування;
Виховна:
* продовжити виховання позитивного ставлення до професії Тракторист;
* сприяти формуванню глибокого пізнавального та емоційного інтересу до сільськогосподарського виробництва;
* сприяти прояву задоволеності своєю діяльністю.
Методи навчання:
• словесний;
• дослідний;.
Форма проведення уроку: комбінована
Форма навчальної діяльності: фронтальна, групова, Індивідуальна.
Засоби навчання:
* роздатковий матеріал;
* слово викладача;
• маркер;
• дошка.
• мультимедійний проектор
• компьютер
Хід уроку:
Організаційна діяльність викладача:
1. Організаційний момент (5 хв)
Підготувати учнів до роботи
2. Цілепокладання, мотивація (5 хв)
Спонукати до активного сприйняття і осмислювання матеріалу, викликати інтерес і активність, створити творчу атмосферу колективної роботи.
Визначити тему, цілі і завдання уроку
3. Вивчення нового матеріалу(30 хв)
КОНСПЕКТ УРОКУ
1.Мета роботи. Засвоїти призначення, будову, технологічний процес роботи косарок та основні регулювання..
2. Тривалість заняття –1 академічна година.
3. Обладнання робочого місця
машини: КРН-2,1;КС-2.1 :КІР-1,5; плакати.
4. Місце проведення заняття:
лабораторія с.-г. машин, відкритий майданчик для зберігання сільськогосподарської техніки.
5. Загальні відомості
Процес заготівлі кормів із трав, кукурудзи, соняшнику є трудомістким, а технологічні операції, пов’язані з ним, виконуються в стислі агротехнічні терміни. Із трав одержують сіно (розсипне, пресоване в паках або рулонах), сінаж, трав’яні брикети, частково силос, а також високовітамінний корм – трав’яне борошно. Для одержання сінажу вирощують кукурудзу, соняшник, багаторічні високостеблові трави.
Процес заготівлі сіна передбачає послідовне виконання наступних технологічних операцій:
- скошування (скошування з одночасним плющенням);
- ворушіння;
- згрібання у валки;
- підбирання валків з формуванням копиць, рулонів (паків);
- транспортування.
Послідовне виконання аналогічних операцій передбачає заготівлю сінажу. Проте підбирання валків відбувається з одночасним подрібненням маси вологістю 50-55% і навантажуванням її у транспортні засоби; перевезення та завантажування подрібненої маси в траншеї або башти з наступним її трамбуванням і герметизацією.
Таким самим чином, як сінаж, заготовляють силос. Відмінність полягає в тому, що силосні культури збирають з одночасним подрібненням дещо більшої довжини січки і природної вологості (80-85%) з навантаженням у транспортні засоби. Наступні ж операції аналогічні, що й під час заготівлі сінажу.
Косарки КС-2,1, КРН-2,1А, КДП-4, КТП-6,0 використовують для скошування трав з укладанням їх у покоси. Бобові трави скошують з одночасним плющенням самохідними косарками-плющарками КПС-5Г, Е-302 та причіпними КПРН-3,0.
Складовими частинами косарок є різальні апарати, що спираються на башмаки та механізми їх приводу, зрівноваження і переведення в робоче або транспортне положення.
6. Методика виконання лабораторної роботи
Вивчення конструкцій машин для заготівлі кормів проводиться на їх натурних зразках безпосередньо на робочому місці. Призначення та будову робочих органів косарок вивчають біля стенду з робочими органами.
Конструкції машин вивчають за окремими групами, відповідно послідовності використання у технології заготівлі кормів. Особливу увагу звертають на робочі органи машин, механізми їх приводу, технологічні регулювання та послідовність підготовки до роботи.
7. Послідовність виконання лабораторної роботи
7.1. Вивчити будову та роботу косарки КРН-2,1;
7.2. Ознайомитись із робочими органами косарки КС-2.1;
7.3. Ознайомитися з роботою та використанням косарки КІР-1,5
7.4 Ознайомитись з основними регулюваннями та підготовкою до роботи
7.4. Скласти звіт.
8. Зміст звіту
8.1. Описати технологічний процес роботи косарок для скошування трави у прокіс.
8.2. Накреслити схеми різальних апаратів косарок.
Питання для самоконтролю
9.1. Характеристика видів кормів із трав.
9.2. Технологія та комплекс машин для заготівлі сіна.
9.3. Технологія та комплекс машин для заготівлі розсипного сіна.
9.4. Технологія та комплекс машин для заготівлі силосу, сінажу.
9.5. Призначення робочих органів косарок. Класифікація косарок.
9.6. Технологічний процес роботи косарки.
9.7. Основні регулювання косарок..
Бібліографічний список
1. Войтюк Д.Г., Гаврилюк Г.Р. Сільськогосподарські машини. – К.: Урожай, 1994. – С.219-253; 299-309.
2. Карпенко А.Н., Халанский В.М. Сельскохозяйственные машины. – М.: Колос, 1983 (1989). – С.174-204; 332-334.
3. Ярошенко П.Н., Ярошенко Л.О. Сільськогосподарські машини: Лабораторно-практичні заняття. – К.: Вища шк., 1978. – С.71-81; 157-180.
4. Узагальнення нових знань(4 хв)
Розкрити спектр думок по заданій темі
5. Домашнє завдання (1 хв)
Вивчити даний матеріал .Розширити свої знання по темі використавши матеріали інтернет ресурсів
ПЛАН-КОНСПЕКТ УРОКУ ЛПЗ
ТЕРМІН ЧАСУ 1 ГОД
Тема : Вивчення будови прес-підбирачів їх регулювання
Навчальна дисципліна: Сільськогосподарські машини
Урок№_45_ Дата проведення __________ Група ________
Мета навчального заняття:
* продовжити вивчення методів і прийомів виконання механізованих робіт у сільському господарстві та шляхів і засобів підвищення родючості ґрунтів.
Навчальна:
* сприяти збагаченню знань учнів про сільськогосподарське виробництво;
* сприяти активізації їх розумової діяльності;
* створювати умови для встановлення зв'язку теорії з практикою, з життєвими явищами і виробничими процесами.
Розвиваюча:
* продовжити розвиток умінь, пов'язаних зі сприйняттям і аналізом джерел;
* сприяти розвитку спостережливості і самостійного осмислювання окремих зв'язків, відносин, ознак між собою;
* продовжити виховання навичок культури мовного спілкування;
Виховна:
* продовжити виховання позитивного ставлення до професії Тракторист;
* сприяти формуванню глибокого пізнавального та емоційного інтересу до сільськогосподарського виробництва;
* сприяти прояву задоволеності своєю діяльністю.
Методи навчання:
• словесний;
• дослідний;.
Форма проведення уроку: комбінована
Форма навчальної діяльності: фронтальна, групова, Індивідуальна.
Засоби навчання:
* роздатковий матеріал;
* слово викладача;
• маркер;
• дошка.
• мультимедійний проектор
• компьютер
Хід уроку:
Організаційна діяльність викладача:
1. Організаційний момент (5 хв)
Підготувати учнів до роботи
2. Цілепокладання, мотивація (5 хв)
Спонукати до активного сприйняття і осмислювання матеріалу, викликати інтерес і активність, створити творчу атмосферу колективної роботи.
Визначити тему, цілі і завдання уроку
3. Вивчення нового матеріалу(30 хв)
КОНСПЕКТ УРОКУ
1.Мета роботи. Засвоїти призначення, будову, технологічний процес роботи прес-підбирачів.
2. Тривалість заняття –1 академічна година.
3. Обладнання робочого місця
машини: ПРП-1,6; плакати.
4. Місце проведення заняття:
лабораторія с.-г. машин, відкритий майданчик для зберігання сільськогосподарської техніки.
5. Загальні відомості
Процес заготівлі кормів із трав, кукурудзи, соняшнику є трудомістким, а технологічні операції, пов’язані з ним, виконуються в стислі агротехнічні терміни. Із трав одержують сіно (розсипне, пресоване в паках або рулонах), сінаж, трав’яні брикети, частково силос, а також високовітамінний корм – трав’яне борошно. Для одержання сінажу вирощують кукурудзу, соняшник, багаторічні високостеблові трави.
Процес заготівлі сіна передбачає послідовне виконання наступних технологічних операцій:
- скошування (скошування з одночасним плющенням);
- ворушіння;
- згрібання у валки;
- підбирання валків з формуванням копиць, рулонів (паків);
- транспортування.
Послідовне виконання аналогічних операцій передбачає заготівлю сінажу. Проте підбирання валків відбувається з одночасним подрібненням маси вологістю 50-55% і навантажуванням її у транспортні засоби; перевезення та завантажування подрібненої маси в траншеї або башти з наступним її трамбуванням і герметизацією.
Таким самим чином, як сінаж, заготовляють силос. Відмінність полягає в тому, що силосні культури збирають з одночасним подрібненням дещо більшої довжини січки і природної вологості (80-85%) з навантаженням у транспортні засоби. Наступні ж операції аналогічні, що й під час заготівлі сінажу.
Прес-підбирачі призначені для підбирання з валків прив’яленого сіна, соломи і формування з них паків (машина ПС-1,6), або рулонів (машина ПРП-1,6).
6. Методика виконання лабораторної роботи
Вивчення конструкцій машин для заготівлі кормів проводиться на їх натурних зразках безпосередньо на робочому місці. Призначення та будову робочих органів в лабораторії
Конструкції машин вивчають за окремими групами, відповідно послідовності використання у технології заготівлі кормів. Особливу увагу звертають на робочі органи машин, механізми їх приводу, технологічні регулювання та послідовність підготовки до роботи.
7. Послідовність виконання лабораторної роботи
7.1. Вивчити будову та роботу прес-підбирача ПРП-1,6;
7.2. Ознайомитись із робочими органами прес-підбирача ПРП-1,6;
7.3. Ознайомитися з роботою та використанням прес-підбирача ПРП-1,6; підбирачів-копнувачів.
7.4. Скласти звіт.
8. Зміст звіту
8.1. Описати технологічний процес роботи прес-підбирача ПРП-1,6
8.2. Накреслити схему прес-підбирача ПРП-1,6.
Питання для самоконтролю
9.1. Характеристика видів кормів із трав.
9.2. Технологія та комплекс машин для заготівлі рулонного (пресованого) сіна.
9.3. Технологія та комплекс машин для заготівлі розсипного сіна.
9.4. Основні регулювання прес-підбирача ПРП-1,6
9.5. Технологічний процес прес-підбирача ПРП-1,6.
9.6. Загальна будова прес-підбирача ПРП-1,6.
Бібліографічний список
1. Войтюк Д.Г., Гаврилюк Г.Р. Сільськогосподарські машини. – К.: Урожай, 1994. – С.219-253; 299-309.
2. Карпенко А.Н., Халанский В.М. Сельскохозяйственные машины. – М.: Колос, 1983 (1989). – С.174-204; 332-334.
3. Ярошенко П.Н., Ярошенко Л.О. Сільськогосподарські машини: Лабораторно-практичні заняття. – К.: Вища шк., 1978. – С.71-81; 157-180.
4. Узагальнення нових знань(4 хв)
Розкрити спектр думок по заданій темі
5. Домашнє завдання (1 хв)
Вивчити даний матеріал .Розширити свої знання по темі використавши матеріали інтернет ресурсів
КУКУРУДЗОЗБИРАЛЬНІ МАШИНИ
ПЛАН-КОНСПЕКТ УРОКУ
ТЕРМІН ЧАСУ 2ГОД (1+1)
Тема : 48.Технологія збирання кукурудзи і система збиральних машин. 49. Кукурудзозбиральні машини.
Навчальна дисципліна: Сільськогосподарські машини
Урок№__46 Дата проведення __________ Група ________
Мета навчального заняття:
* продовжити вивчення методів і прийомів виконання механізованих робіт у сільському господарстві та шляхів і засобів підвищення родючості ґрунтів.
Навчальна:
* сприяти збагаченню знань учнів про сільськогосподарське виробництво;
* сприяти активізації їх розумової діяльності;
* створювати умови для встановлення зв'язку теорії з практикою, з життєвими явищами і виробничими процесами.
Розвиваюча:
* продовжити розвиток умінь, пов'язаних зі сприйняттям і аналізом джерел;
* сприяти розвитку спостережливості і самостійного осмислювання окремих зв'язків, відносин, ознак між собою;
* продовжити виховання навичок культури мовного спілкування;
Виховна:
* продовжити виховання позитивного ставлення до професії Тракторист;
* сприяти формуванню глибокого пізнавального та емоційного інтересу до сільськогосподарського виробництва;
* сприяти прояву задоволеності своєю діяльністю.
Методи навчання:
• словесний;
• дослідний;.
Форма проведення уроку: комбінована
Форма навчальної діяльності: фронтальна, групова, Індивідуальна.
Засоби навчання:
* роздатковий матеріал;
* слово викладача;
• маркер;
• дошка.
• мультимедійний проектор
• компьютер
Хід уроку:
Організаційна діяльність викладача:
1. Організаційний момент (5 хв)
Підготувати учнів до роботи
2. Цілепокладання, мотивація (5 хв)
Спонукати до активного сприйняття і осмислювання матеріалу, викликати інтерес і активність, створити творчу атмосферу колективної роботи.
Визначити тему, цілі і завдання уроку
3. Вивчення нового матеріалу(30 хв)
КОНСПЕКТ УРОКУ
48. Технологія збирання кукурудзи і система збиральних машин
Залежно від призначення посіву кукурудзу збирають на зелений корм, силос або на зерно. На зелений корм кукурудзу скошують у період викидання волотей, коли вона найсокови- тіша; для силосування — в стадії молочно-воскової стиглості зерна; на зерно кукурудзу збирають на початку повної стиглості но чекаючи підсихання качанів на корені. Збирання кукурудзи, особливо на зерно,— найбільш трудомісткий процес. Із загальних витрат 47,3 людино-годин на вирощування і збирання 1 га кукурудзи на зерно па збирання припадає 36,8, а при вирощуванні на силос з 22,5 людино-годин—12,7.
Технологічний процес збирання кукурудзи па силос має дві різновидності: для великої рогатої худоби її скошують, подрібнюють і силосують разом з качанами, а для свиней силосують окремо качани і стебла, тому в цьому разі до процесу збирання додається операція відокремлення качанів від стебел.
Процес збирання кукурудзи повної стиглості полягає в скошуванні стебел, відокремленні від них качанів, очищенні качанів від обгорток, подрібненні стебел і обгорток для силосування. При механізованому збиранні кукурудзи слід додержувати таких агротехнічних вимог: збирати без втрат і в найкращі строки; зрізання стебел повинно бути низьким—10—12 см\ зерна під час збирання кукурудзи повної стиглості повинні бути пепошкоджені.
Кукурудзу молочно-воскової і повної стиглості збирають двома способами: роздільним і комбайновим.
При роздільному збиранні застосовують переобладнані рядкові жатки і жатки зернозбиральних комбайнів та подрібнювальні машини. При цьому качани обривають і очищають на току вручну або на спеціальних стаціонарних машинах.
При комбайновому способі збирання кукурудзи з відриванням і без відривання качанів з одночасним подрібненням листостеблової маси використовують такі машини: причіпні кукурудзозбиральні комбайни ККХ-3, КОП-1,4, комбайн ККОН-З, навішений на самохідне шасі СШ-75, кукурудзо-силосозбираль- ні комбайни СК-2.6А, УКСК-2.6Л, зернові комбайни СК-5, обладнані спеціальними жатками ЖКІ 1-2,6.
49. Кукурудзозбиральні машини
Кукурудзозбиральний комбайн КОП-1,4 «Херсонець-200» призначений для збирання кукурудзи будь-якої стадії стиглості зерна, посіяної з міжряддям 70 або 90 см квадратно- гніздовим або пунктирним способом. Агрегатують з тракторами Т-150, ТД-75, обладнаними ходозменшувачем.
Комбайн КОП-1,4 складається {мал. 97, а) з подільників З, різального апарата 1, верхніх напрямних 2 і нижніх подавальних ланцюгів, похилювача стебел 4, подрібнювально-кидального пристрою з трубою 6, качановідривного апарата 5, качаноочис- ного пристрою, транспортера неочищених качанів 7, транспортера очищених качанів і зерна 8, шнека качанів і шнека зерна, транспортера обгорток, рами 10, ходової частини і механізму приведення в рух робочих органів від вала відбору потужності трактора.
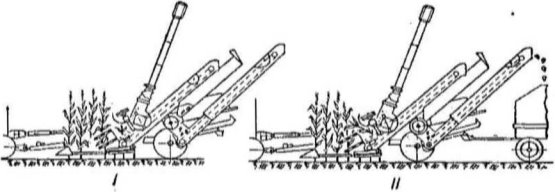
Під час збирання кукурудзи на зерно комбайн працює так (мал. 97,6, І). Під час руху агрегату вздовж рядків подільники відокремлюють і піднімають пониклі стебла кукурудзи, а напрямні ланцюги спрямовують їх до подавальних ланцюгів, які затискують стебла і утримують у момент зрізування. Різальний апарат зрізує стебла, після чого вони підводяться подавальними ланцюгами до качановідривного апарата. В цей час по- хилювач відводить і затримує верхівки стебел, які комлевою частиною потрапляють між вальці качановідривного апарата. Вальці, обертаючись один назустріч одному, протягують стебла і утримують в момент їх подрібнення. Лопаті подрібнювана відкидають масу по трубі у транспортні засоби. Качани між вальцями не проходять, тому відриваються і падають на транспортер, а далі через скатну дошку, де вентилятор відокремлює легкі домішки, скочуються на очисний апарат. Вальці очисного апарата захоплюють і відривають обгортки качанів, що разом з вилущеним зерном потрапляють на транспортер. Через решітчасте дно транспортера зерно просівається і надходить на транспортер очищених качанів, а обгортки — в трубу, яка подає подрібнену листостеблову масу. Транспортер подає очищені качани разом із зерном у візок, причеплений ззаду комбайна.
Під час збирання кукурудзи на силос з відокремленням качанів (мал. 97,6, II), технологічний процес відбувається так, як описано вище, тільки скатну дошку переставляють в таке положення, щоб качани, обминувши очисний апарат, надходили через вивантажувальний транспортер у візок. Відповідно відключають привід від тих робочих вузлів, які не працюють (вентилятор, очисник, транспортер обгорток, зерновий шнек).
Під час збирання кукурудзи на силос без відокремлення качанів (мал. 97,6, III) качановідривні вальці замінюють бі- те.рами, які подають і утримують стебла для подрібнення.

Мал. 97. Кукурудзозбиральний комбайн КОП-1,4:
а — загальний пнгляд; б — технологічна схема; / — для збнрлния кукурудзи на силос з подрібненням початків і стебал: // — для збирання на силос з відокремленням печатній для роздільного снлосупап- ия; III — дли .збирання на .черно З очищенням І1ОЧЛТКІП иід обгорток. / — різальний апарат; 2 — напрямні ланцюги; а — подільники; 4 — похил юпач стебел; 5 — качаноиїд- рилиий апарат; б—труби; 7-—гране- портер неочнщсних качаній; tt — транспортер очищених качані»; ‘J — колесо: І(/ —■ рама з причіпною сни- цею; II — головний кард.чіипій вил.
![]()
Мал, 98. Очисник качанів.
ОПП-5;
й — загальний вигляд; б — техноло-
гічна схема: 1 — рама; 2 — підби-
рач; 3 —завантажувальний транс-
портер; 4 — скатна дошка; 5 — при-
тискний пристрій; 6 — очисні валь-
ці; 7—• транспортер обгорток: 8 —
сортувальний транспортер; 9— еле-
ватор качанів; 10 — зерновловлю
вач; 11 — ексгаустер; 12 — шнек

Приймальна камера транспортера качанів закривається спеціальним щитком, а привод відповідно виключається.
Комбайн КОП-1,4 обладнаний пристроями автоматичного захисту і контролю за роботою брального русла, силосопро- зоду, очисника, які сповіщають тракториста про неполадки, що могли трапитися під час роботи.
Механізм підіймання в транспортне положення комбайна і ■опускання в робоче, а також механізм регулювання висоти зрізання гідравлічні. •
Очисник качанів кукурудзи ОПП-5 (О — очисник, П — качанів, П — напівначіпний, 5 — продуктивність у т}год) призначений для очищення на току качанів кукурудзи від обгорток та інших домішок. ' Робоча швидкість — 0,01—0,06 км/год\ агрегатують його з трактором «Беларусь», обладнаним ходозменшувачем.
Очисник (мал. 98) складається з підбирача 2, завантажувального транспортера 5, скатної дошки 4, очисних вальців 6, притискного пристрою 5, транспортера обгорток 7, сортувального транспортера 8, ексгаустера 11, елеваторів качанів 9, зерновловлювача 10, рами 1 та підіймального механізму.
Очисник працює так. Під час руху машини вздовж кагату качанів підбирач 2 захоплює качани і подає їх на завантажувальний транспортер 3, де вони розміщуються вздовж жолобів І переміщуються до очисних вальців. Біля вальців 6 роликами притискачів 5 качани притискуються до вальців 6 і переміщуються вздовж них униз. Очисні вальці, обертаючись назустріч один одному, захоплюють обгортки та інші домішки і скидають на транспортер 7. Транспортер і шнек 12 подають обгортки до ексгаустера, який видуває їх на обочину току. Очищені качани сходять на сортувальний транспортер 8, де в разі потреби їх перебирають. Неочищені качани відкидають на вальці. З транспортера 8 качани надходять на елеватор, який вивантажує їх на тік. Вилущене зерно, яке може пройти разом з обгортками, по скатній дошці сходить у зерновловлювач 10.
4. Узагальнення нових знань(4 хв)
Розкрити спектр думок по заданій темі
5. Домашнє завдання (1 хв)
Вивчити даний матеріал .Розширити свої знання по темі використавши матеріали інтернет ресурсів
ПЛАН-КОНСПЕКТ УРОКУ
ТЕРМІН ЧАСУ 2ГОД (1+1)
Тема : 50. Підготовка до роботи кукурудзозбиральних комбайнів та організація їх роботи.
Навчальна дисципліна: Сільськогосподарські машини
Урок№__47 Дата проведення __________ Група ________
Мета навчального заняття:
* продовжити вивчення методів і прийомів виконання механізованих робіт у сільському господарстві та шляхів і засобів підвищення родючості ґрунтів.
Навчальна:
* сприяти збагаченню знань учнів про сільськогосподарське виробництво;
* сприяти активізації їх розумової діяльності;
* створювати умови для встановлення зв'язку теорії з практикою, з життєвими явищами і виробничими процесами.
Розвиваюча:
* продовжити розвиток умінь, пов'язаних зі сприйняттям і аналізом джерел;
* сприяти розвитку спостережливості і самостійного осмислювання окремих зв'язків, відносин, ознак між собою;
* продовжити виховання навичок культури мовного спілкування;
Виховна:
* продовжити виховання позитивного ставлення до професії Тракторист;
* сприяти формуванню глибокого пізнавального та емоційного інтересу до сільськогосподарського виробництва;
* сприяти прояву задоволеності своєю діяльністю.
Методи навчання:
• словесний;
• дослідний;.
Форма проведення уроку: комбінована
Форма навчальної діяльності: фронтальна, групова, Індивідуальна.
Засоби навчання:
* роздатковий матеріал;
* слово викладача;
• маркер;
• дошка.
• мультимедійний проектор
• компьютер
Хід уроку:
Організаційна діяльність викладача:
1. Організаційний момент (5 хв)
Підготувати учнів до роботи
2. Цілепокладання, мотивація (5 хв)
Спонукати до активного сприйняття і осмислювання матеріалу, викликати інтерес і активність, створити творчу атмосферу колективної роботи.
Визначити тему, цілі і завдання уроку
3. Вивчення нового матеріалу(30 хв)
КОНСПЕКТ УРОКУ
50. Підготовка до роботи кукурудзозбиральних комбайнів та організація їх роботи
Перед початком роботи комбайн очищають від пилу, старого мастила, перевіряють стан рами, коліс, затяжку болтових з’єднань, зварні шви, змащують основні вузли і механізми згідно із заводською інструкцією.
У різального апарата комбайна ККХ-3 зазор між спинкою ножа і притискними лапками встановлюють 0,6 мм, а між сегментами ножа і протирізальними пластинами — не більш як 0,5 мм. Регулюють зазор, змінюючи кількість прокладок під притискними лапками.
До подавальних ланцюгів ставлять такі вимоги: всі зірочки контура, притискні ролики і напрямні притискних планок мають лежати в одній площині; вилки натяжних планок повинні легко переміщатися в кронштейнах; натяг ланцюгів повинен бути таким, щоб не було вільного провисання.У подрібнювальному апараті старанно перевіряють затяжку болтів кріплення ножів. Під час роботи перевірку періодично повторюють, а після збирання ЗО—35 га кукурудзи ножі повертають на 180°, а коли затуплюються і ці леза, ножі знімають, гострять, а на їх місце встановлюють нові. Підготовка поля до роботи. За 2—3 дні. до початку збирання кукурудзи оглядають поле, усувають можливі перешкоди, вибирають спосіб руху агрегату, розбивають ділянку на загінки, обкошують і прокошують їх. Під час збирання кукурудзи на зерно застосовують тоновий спосіб руху; при збиранні на силос комбайнами суцільного зрізу застосовують коловий спосіб руху; комбайни рядкового зрізу рухаються тоновим способом. Розмір загінки має відповідати 2—3-денній роботі комбайна. Для повороту агрегату при тоновому способі руху прокошують поворотні смуги завширшки 20—ЗО м; коли ділянка велика і гони довгі (понад 1,5 км), роблять ще поздовжні (між загінками) і поперечні (впоперек загінки) прокоси завширшки 6—7 м для руху транспортних засобів. Бажано, щоб довгий бік загінки збігався з напрямом останнього міжрядного обробітку. Кути повороту при коловому способі руху обкошують по радіусу 10—15 м.
Для обкосів загінок використовують звичайні збиральні машини: жатки, сінокосарки тощо. На великих масивах загінки можна обкошувати самохідними комбайнами СК-5, обладнаними спедіальною жаткою ЖКН-2,6. Зрізані стебла з прокосів прибирають до початку збирання.
Організація транспортних робіт під час збирання кукурудзи. Щоб забезпечити високоякісну безперебійну роботу кукурудзозбиральних комбайнів, треба своєчасно виділити і закріпити за кожним агрегатом транспортні засоби для 'вивезення качанів і подрібненої маси. Найдоцільніше використовувати для цього автомобілі-самоскиди, тракторні саморозвантажувальні причепи і бортові автомобілі.
Для визначення потрібної кількості транспортних одиниць до комбайна можна користуватися формулою:
/ 60/’ 2Z.-60’. / \
• QA......... 4------І + + Л +
0,1/O’Q І \ 1 “ 7
' / _ . ” . . ... ,
НІ)/’
де Н — кількість транспортних одиниць; В— ширина захвату, м. v — робоча швидкість руху комбайна, км/год-, Q — урожайність кукурудзи, ц!га\ 0,1 —коефіцієнт переводу; А — коефіцієнт використання робочого часу; р— фактична вага продукту в кузові, г; L — довжина шляху перевезень в один кінець, км\ С — час, затрачений за зміну транспорту біля комбайна, хв\ vA—швидкість руху транспорту, км/год-, /2~ час розвантажування, хв\ tz— час для зважування продукту і оформлення документів, хв.
Для розвантаження кузова автомобіля, не обладнаного саморозвантажувальним пристроєм, слід застосовувати сітки або щит-лопати і троси з приводом від трактора, що скорочує затрати часу на розвантаження майже в 10 раз проти розвантаження вручну.
Перевірка якості роб о ти. Перевіряючи якість роботи кукурудзозбирального комбайна, звертають увагу на висоту зрізання, втрати качанів і вилущеного зерна. При цьому перевіряють наявність качанів і зерна в силосній масі і на поверхні поля.
Якість роботи силосозбирального комбайна характеризується висотою зрізання, величиною часточок подрібненої маси і втратами стеблолистової маси. Висоту зрізання замірюють лінійкою в трьох місцях до діагоналі ділянки.
Техніка безпеки. Під час роботи кукурудзозбиральних машин забороняється: очищати різальний апарат, подавальні ланцюги, качановідривні вальці, подрібнювальний апарат; працювати без захисних кожухів карданного вала і ланцюгової передачі.
4. Узагальнення нових знань(4 хв)
Розкрити спектр думок по заданій темі
5. Домашнє завдання (1 хв)
Вивчити даний матеріал .Розширити свої знання по темі використавши матеріали інтернет ресурсів
МАШИНИ ДЛЯ ЗБИРАННЯ КАРТОПЛІ
ПЛАН-КОНСПЕКТ УРОКУ
ТЕРМІН ЧАСУ 2ГОД (1+1)
Тема : 54.Технологія збирання картоплі.Агротехнічні вимоги.
Навчальна дисципліна: Сільськогосподарські машини
Урок№__48 Дата проведення __________ Група ________
Мета навчального заняття:
* продовжити вивчення методів і прийомів виконання механізованих робіт у сільському господарстві та шляхів і засобів підвищення родючості ґрунтів.
Навчальна:
* сприяти збагаченню знань учнів про сільськогосподарське виробництво;
* сприяти активізації їх розумової діяльності;
* створювати умови для встановлення зв'язку теорії з практикою, з життєвими явищами і виробничими процесами.
Розвиваюча:
* продовжити розвиток умінь, пов'язаних зі сприйняттям і аналізом джерел;
* сприяти розвитку спостережливості і самостійного осмислювання окремих зв'язків, відносин, ознак між собою;
* продовжити виховання навичок культури мовного спілкування;
Виховна:
* продовжити виховання позитивного ставлення до професії Тракторист;
* сприяти формуванню глибокого пізнавального та емоційного інтересу до сільськогосподарського виробництва;
* сприяти прояву задоволеності своєю діяльністю.
Методи навчання:
• словесний;
• дослідний;.
Форма проведення уроку: комбінована
Форма навчальної діяльності: фронтальна, групова, Індивідуальна.
Засоби навчання:
* роздатковий матеріал;
* слово викладача;
• маркер;
• дошка.
• мультимедійний проектор
• компьютер
Хід уроку:
Організаційна діяльність викладача:
1. Організаційний момент (5 хв)
Підготувати учнів до роботи
2. Цілепокладання, мотивація (5 хв)
Спонукати до активного сприйняття і осмислювання матеріалу, викликати інтерес і активність, створити творчу атмосферу колективної роботи.
Визначити тему, цілі і завдання уроку
3. Вивчення нового матеріалу(30 хв)
КОНСПЕКТ УРОКУ
54. Технологія збирання картоплі.
Агротехнічні вимоги
Процес збирання картоплі складається з таких операцій: викопування бульб, очищення їх від землі, відокремлення бульб від карт|^плиння і збирання в тару, а також збирання з поля картоплиння.
Картоплю викопують і частково очищають від землі за допомогою картоплекопачів. Збирають картоплю в тару, доочищають і сортують головним чином вручну.
За будовою і принципом роботи картоплекопачі бувають прості (підкопують і трохи піднімають рядки картоплі), елеваторні та грохотнІ (викопують картоплю із землі, відокремлюють від землі і частково від картоплиння і розкладають на поверхні • поля), кидальні (вибирають бульби картоплі із землі і викидають на поверхню поля).
Картоплекопачі бувають причіпні і навісні, а за кількістю одночасно підкопуваних рядків — одно- і дворядні.
Найпоширеніші картоплекопачі елеваторного і грохотного типів: КТН-2Б, КВН-2М. Картоплекопачі-кидалки навісного типу, однорядні застосовують у північно-західних районах країни на важких грунтах.
Крім картоплекопачів, наша промисловість випускає картоплезбиральні комбайни, які повністю механізують процеси викопування, очищення, сортування та збирання картоплі в тару. Однак перші випуски комбайнів КОК-2, ККР-2 і їх модифікації не забезпечили високої якості роботи, тому випуск їх з 1958 р. припинено, а тепер випускають комбайни ККУ-2 «Дружба» у грохотігій або елеваторній модифікаціях.
Під час машинного збирання картоплі слід додержувати таких агротехнічних вимог: не пошкоджувати картоплі робочими органами картоплезбиральної машини; грудки землі подрібнювати так, щоб бульби картоплі легко відокремлювались від основної маси грунту. Якщо картоплю збирають у тару, то різних домішок (картоплиння, рослинних решток, грудок землі та ін.) повинно бути не більш як 3%. Втрати картоплі після викопування і підбирання мають становити не більш як 5—8%. Збирати картоплю треба в найкращі агротехнічні строки.
4. Узагальнення нових знань(4 хв)
Розкрити спектр думок по заданій темі
5. Домашнє завдання (1 хв)
Вивчити даний матеріал .Розширити свої знання по темі використавши матеріали інтернет ресурсів
ПЛАН-КОНСПЕКТ УРОКУ
ТЕРМІН ЧАСУ (4 ГОДИНИ) 2 ГОД (1+1)
Тема : 55. Загальна будова картоплекопачів та картоплезбиральних комбайнів.
Навчальна дисципліна: Сільськогосподарські машини
Урок№_49 Дата проведення __________ Група ________
Мета навчального заняття:
* продовжити вивчення методів і прийомів виконання механізованих робіт у сільському господарстві та шляхів і засобів підвищення родючості ґрунтів.
Навчальна:
* сприяти збагаченню знань учнів про сільськогосподарське виробництво;
* сприяти активізації їх розумової діяльності;
* створювати умови для встановлення зв'язку теорії з практикою, з життєвими явищами і виробничими процесами.
Розвиваюча:
* продовжити розвиток умінь, пов'язаних зі сприйняттям і аналізом джерел;
* сприяти розвитку спостережливості і самостійного осмислювання окремих зв'язків, відносин, ознак між собою;
* продовжити виховання навичок культури мовного спілкування;
Виховна:
* продовжити виховання позитивного ставлення до професії Тракторист;
* сприяти формуванню глибокого пізнавального та емоційного інтересу до сільськогосподарського виробництва;
* сприяти прояву задоволеності своєю діяльністю.
Методи навчання:
• словесний;
• дослідний;.
Форма проведення уроку: комбінована
Форма навчальної діяльності: фронтальна, групова, Індивідуальна.
Засоби навчання:
* роздатковий матеріал;
* слово викладача;
• маркер;
• дошка.
• мультимедійний проектор
• компьютер
Хід уроку:
Організаційна діяльність викладача:
1. Організаційний момент (5 хв)
Підготувати учнів до роботи
2. Цілепокладання, мотивація (5 хв)
Спонукати до активного сприйняття і осмислювання матеріалу, викликати інтерес і активність, створити творчу атмосферу колективної роботи.
Визначити тему, цілі і завдання уроку
3. Вивчення нового матеріалу(30 хв)
КОНСПЕКТ УРОКУ
55. Загальна будова і робота картоплекопачів та картоплезбиральних комбайнів
Картоплекопач КТН-2Б (К — картоплекопач, Т — тракторний, Н — начіпний, 2 — кількість рядків, Б — модель) призначений для підкопування двох рядків картоплі, відокремлення бульб від землі і розкладання їх з картоплинням на поверхні поля. Ширина захвату — 1,4 лі, продуктивність — до 0,4 га/год. Навішують його на трактор «Беларусь».
Картоплекопач (мал. 108) складається з рами 4, механізму навішування 5, двох коліс 9, двох підкопувальних лемешів /, подільника 2, двох основних З і одного каскадного 7 елеваторів, струшувальної прутикової решітки 8, двох напрямних щитків 6, які спрямовують викопану картоплю для розкладання вузькою рівною смугою на поверхні поля, і механізму привода від вала відбору потужності трактора. За допомогою гідравлічної системи трактора лемеші піднімають і опускають.
Картоплекопач працює так. Під час руху заглиблені лемеші картоплекопача підкопують два рядки картоплі і скибу грунту спрямовують на перший елеватор, верхня вітка якого переміщує скибу вгору і водночас струшує її, порушуючи зв’язок землі з бульбами. Через прутикове полотно основного елеватора просівається земля, а картопля надходить на другий каскадний елеватор, де грунт подрібнюється і просівається. Після каскадного елеватора рештки грунту, бульби і картоплиння надходять на струшувальну решітку, яка, вібруючи, відокремлює грунт від бульб і картоплиння. Із струшувальної решітки бульби і картоплиння розстеляються на поверхні поля за машиною. Бульби збирають у тару і доочищають віл картоплиння вручну.
Картоплекопач КВН-2М (К— картоплекопач, В — вібраційний. Н — навісний, 2 — кількість рядків, М — модер-
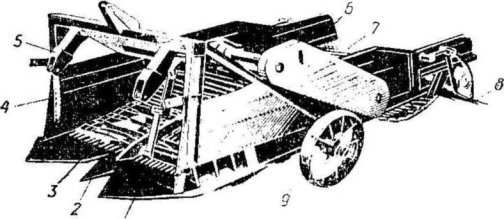
J
Мал. 108. Загальний нигляд картоплекопача КТН-2Б;
1—лемеші; 2 — подільник; ■'< - осипаний елеватор: 4— рима; а — механізм навішування; 6 — напрямні щитки; 7 — каскадний слева top; 8 — струшувальиа пруїнкова решітка; 9 — колеса.
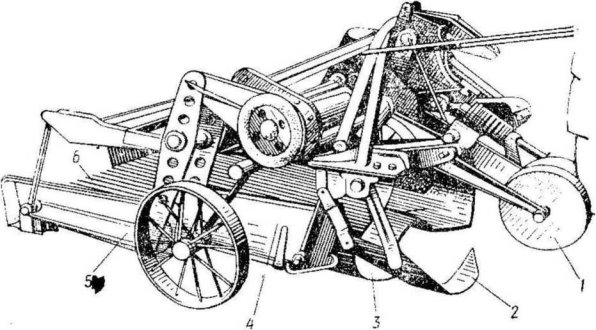
Мал. 109. Картоплекопач КВН-2М:
]—копіювальні котки; 2 —скоба; if—вібраційний леміш; 4—грохот; 5 — рама; 6 — струшувальна решітка.
візований) призначений для викопування картоплі, відокремлення бульб від землі і картоплиння та розкладання їх на поверхні поля для збирання вручну. Ширина захвату—1,4 м (два рядки), глибина підкопування — 20 см, продуктивність — 0,5 га{год. Навішують його на трактори «Беларусь», Т-25.
Картоплекопач КВН-2М (мал. 109) складається з рами 5, механізму навіски, двох коліс, копіювальних котків 1, скоби 2, двох підкопувальних вібраційних лемешів #, дворешітного вібраційного грохота 4, струшувальної решітки 6 і карданного вала.
Вібраційний грохот порівняно з елеватором має простішу будову і кращу стійкість проти спрацювання. Складається грохот з двох решіт колосникового типу, виготовлених з порожнистих прутиків з гумовими наконечниками. Під час роботи агрегату вібраційні лемеші підкопують два рядки картоплі І подають разом з шаром грунту і бадиллям на грохот. Оскільки лемеші під час роботи виконують коливальний рух, то. це зменшує їх тяговий опір і сприяє руйнуванню скиби грунту. Грохот, коливаючись (720 коливань за хвилину), кришить скибу грунту, відокремлює землю і картоплиння від брил. З грохота картоплиння, бульби і земля, яка ще не просіялася, сходять по струшувальній решітці на поверхню поля.
Універсальний картопле к опач-вал к о у твор ю- в а ч УКВ-2 призначений для викопування картоплі з двох рядків, відокремлення бульб від бадилля, землі та інших домішок і укладання' у валки. З валків бульби підбирають вручну або комбайнами, обладнаними підбирачами.
Картоплекопач УКВ-2 складається з двох підкопувальних лемешів з активними боковинами, прутикового елеватора, пневматичних балонів-грудкоподрібнювачів, решіт, грохота, бадиллє- виносного пристрою, поперечного транспортера, ложеутворюва- ча, рами, ходової частини, механізму привода і гідравлічної системи. Поперечний транспортер дає можливість укладати бульби у валки з чотирьох або шести рядків, що підвищує продуктивність праці. Керування положенням транспортера здійснюється гідросистемою.
Картоплезбиральний комбайн ККУ-2 «Дружба» призначений для викопування і очищення картоплі, яку вирощують на легких і середніх грунтах. Ширина захвату—1,4 м (два рядки). Агрегатують з тракторами ДТ-75 або МТЗ-50 і МТЗ-52, обладнаними ходозменшувачами.
Комбайн ККУ-2 складається (мал. 110) з двох лемешів І, основного елеватора 3, грудкоподрібнювача (пневматичних балонів) 4, дворешітного грохота 5, рідкопрутикового транспортера 6, піднімального барабана 7, транспортера-перебирача 9, транспортера для завантаження бункера 10, транспортера для відведення домішок 12, бункера її, рами, ходових коліс, опорних котків, механізму привода робочих органів, гідравлічного механізму керування ними.
Комбайн ККУ-2 випускають в елеваторній (розглядалася вище) і грохотній модифікаціях. На комбайнах грохотної модифікації (мал. 110,6) замість основного елеватора встановлено грохот, пасивні лемеші замінено вібраційними.
Комбайн працює так. Лемеші (мал. 110, а) підрізають скибу грунту з кущами картоплі і подають на основний елеватор. Тут відділяється більша частина грунту; решта маси попадає між балони, де роздавлюються грудки; вся маса надходить на грохот. Тут внаслідок інтенсивного струшування відсівається грунт і частково відокремлюється бадилля. Бадиллєвиносний відвідний пристрій остаточно відокремлює і відкидає на поверхню поля бадилля та інші рослинні рештки, а бульби падають у піднімальний барабан. Всередині барабана розміщений транспортер-сепаратор, який виносить бульби на транспортер-переби- рач і одночасно відокремлює дрібні домішки. На транспортері- перебнрачі робітники вручну відбирають камінці, грудки тощо, які транспортер 12 викидає вбік, на поверхню поля, а чисті бульби сходять у бункер 11. Після заповнення бункера його розвантажують у транспортні засоби.
Картоплесортувалка РКС-10 (Р — роликова, К — для картоплі, С — сортувалка. 10 — продуктивність у т/год) призначена для очищення картоплі від механічних домішок і сортування її на три фракції: кормову, насінну і продуктову. Приводиться в рух від двигуна ОДВ-ЗООВ. Обслуговує її 6—10 чоловік.
Картоплесортувалка складається із засипного ковша 5
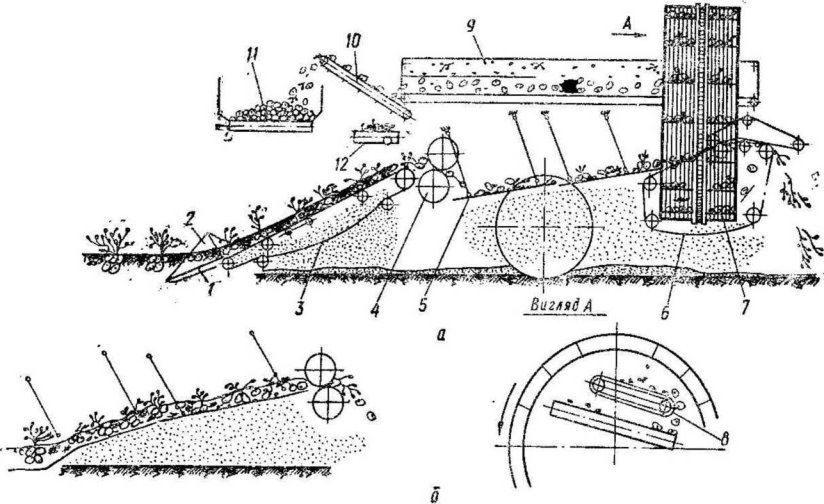
Мал. ПО Технологічна схема картоплезбирального комбайна ККУ-2 «Дружба»;
а — елеваторна модифікація; Л — грохотца модифікація;/ —леміш; 2 — боковими лемеша; 3 — основний елеватор; 4 ~ грудко- подрібнювач; 5—грохот; 6 — рідкопрутиковнй транспортер; 7—піднімальний барабан; Я —-гірка; У — транспортер-перебирач;
10 - завантажувальний транспортер; 11 — бункер; /2 — транспортер домішок.
![]()
![]()
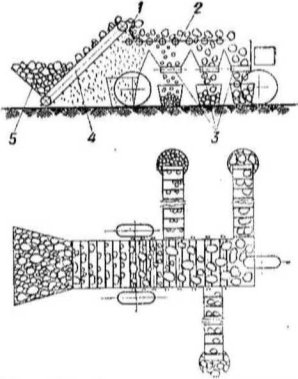
(мал. 111), прутикового подавального елеватора 4, струшувальної решітки /, сортувальної поверхні 2, створеної спочатку гладенькими, а потім фігурними роликами, відвідних транспортерів 3, рами, коліс і механізму передачі рухіу.
К а р топ л ю з ас и п а ють
вручну в ківш, звідки елеватор подає її па сортувальні поверхні. На сортувальній поверхні, утвореній гладенькими роликами, виділяються різні домішки і дуже дрібна картопля (вагою до 20 а), а на поверхні з фігурними роликами, які утворюють круглі отвори, просіваються спочатку бульби дрібної, а потім середньої фракції і транспортерами відводяться в тару; великі бульби (вагою понад 80 г) надходять на транспортер, який виносить їх у тару. На транспортерах робітники вручну відбирають пошкоджену і гнилу картоплю та різні домішки, які ще залишилися. Крім картоплесортувалки РКС-10, для очищення і сортування картоплі, зібраної картоплекомбайном, застосовують сортувальний пункт КСІІ-15; принцип роботи його нелогічний. Відрізняється він від картоплесортувалки РКС-10 вищою продуктивністю і конструкцією. Засипний бункер його пересувний, розрахований для завантаження самоскидами; для відведення очищеної картоплі додаються контейнери і котками, встановленими під транспортерами.
4. Узагальнення нових знань(4 хв)
Розкрити спектр думок по заданій темі
5. Домашнє завдання (1 хв)
Вивчити даний матеріал .Розширити свої знання по темі використавши матеріали інтернет ресурсів
ПЛАН-КОНСПЕКТ УРОКУ
ТЕРМІН ЧАСУ 2ГОД (1+1)
Тема :56. Підготовка до роботи і робота картоплезбиральних машин.
Навчальна дисципліна: Сільськогосподарські машини
Урок№__49_ Дата проведення __________ Група ________
Мета навчального заняття:
* продовжити вивчення методів і прийомів виконання механізованих робіт у сільському господарстві та шляхів і засобів підвищення родючості ґрунтів.
Навчальна:
* сприяти збагаченню знань учнів про сільськогосподарське виробництво;
* сприяти активізації їх розумової діяльності;
* створювати умови для встановлення зв'язку теорії з практикою, з життєвими явищами і виробничими процесами.
Розвиваюча:
* продовжити розвиток умінь, пов'язаних зі сприйняттям і аналізом джерел;
* сприяти розвитку спостережливості і самостійного осмислювання окремих зв'язків, відносин, ознак між собою;
* продовжити виховання навичок культури мовного спілкування;
Виховна:
* продовжити виховання позитивного ставлення до професії Тракторист;
* сприяти формуванню глибокого пізнавального та емоційного інтересу до сільськогосподарського виробництва;
* сприяти прояву задоволеності своєю діяльністю.
Методи навчання:
• словесний;
• дослідний;.
Форма проведення уроку: комбінована
Форма навчальної діяльності: фронтальна, групова, Індивідуальна.
Засоби навчання:
* роздатковий матеріал;
* слово викладача;
• маркер;
• дошка.
• мультимедійний проектор
• компьютер
Хід уроку:
Організаційна діяльність викладача:
1. Організаційний момент (5 хв)
Підготувати учнів до роботи
2. Цілепокладання, мотивація (5 хв)
Спонукати до активного сприйняття і осмислювання матеріалу, викликати інтерес і активність, створити творчу атмосферу колективної роботи.
Визначити тему, цілі і завдання уроку
3. Вивчення нового матеріалу(30 хв)
КОНСПЕКТ УРОКУ
56. Підютовка до роботи і робота картоплезбиральних машин
До початку роботи перевіряють і підтягують кріплення, звертаючи увагу па кріплення лемешів, зірочок елеваторів, шатунів привода грохота, змащують усі тертьові деталі за схемою мащення. Щоб земля розбивалась па грудки і просипалася через полотно елеватора, на ньому замінюють струїпувальні зірочки. На важких грунтах установлюють більш овальні зірочки, а па легких і піщаних користуються круглими.
Для зміни частоти коливання грохотної решітки зірочки за-міпюють. Щоб картопля краще відокремлювалася від домішок особливо на ділянках з підвищеною забур’яненістю, на привод трубчастого коливного вала встановлюють 14-зубову зірочку.
Залежно від ширини міжрядь (60 або 70 см.) переставляють підкопувальні лемеші.
Роботу механізмів картоплезбиральних машин перевіряють на малих обертах, звертаючи особливу увагу на те, щоб вони працювали легко, без заїдання і без зайвих шумів. Обкатують машину на місці, прокручуючи її від трактора протягом 15—20 хв.- Під час роботи в полі встановлюють глибину ходу лемешів з таким розрахунком, щоб бульби картоплі не підрізалися і не залишалися в грунті, а шар землі, знятий лемешами, не був занадто товстий, бо це може призвести до втрат картоплі і до передчасного спрацювання елеваторів і грохота.
Підготовка поля до. збирання картоплі. Прямолінійність міжрядь, своєчасний догляд за картоплею, насамперед боротьба з бур’янами,— все це створює належні умови для нормальної роботи картоплезбиральних машин, а також для вирощування високих урожаїв. Бажано, щоб остання культивація ка^оплі з підгортачами була проведена в тому напрямі, в якому її садили. Збиральний агрегат також повинен рухатись у цьому самому напрямі.
За 2—3 дні до початку з’бирання картоплі скошують і вивозять з площі картоплиння, якщо воно велике і зелене (сухе 'картоплиння не заважає роботі картоплезбиральних машин).
Під час збирання картоплі застосовують три способи руху: загінний, петльовий із суміжними проходами агрегату, загінний безпетльовий. При третьому способі руху відбивають таку ширину загінки, щоб вона дорівнювала парному числу рядків (звичайно 16—20 рядків). У кінці гонів відбивають поворотні смуги завширшки 15—20 м. У першу чергу збирають картоплю з поворотної смуги.
Кількість працівників для підбирання картоплі після картоплекопача можна визначити за формулою:
W-H
п —------,
N
де п — кількість піддиральників; W— продуктивність картоплекопача, га за день; Н — урожайність картоплі, ц/га\ N — норма на одного піддиральника, ц за день (звичайно 14—15 ц).
Перевірка якості роботи. Якість збирання картоплі перевіряють 2—3 рази на день. При цьому звертають увагу на те, щоб пошкоджених бульб було не більше як 1,5—2%, невиконаних — не більш як 6—8%. Після підбирання картоплі за машиною поле боронують, культивують І знову боронують, підбираючи решту картоплі вручну.
Правила техніки безпеки. До роботи на картоплезбиральних машинах допускаються тільки особи, які пройшли спеціальну підготовку.
4. Узагальнення нових знань(4 хв)
Розкрити спектр думок по заданій темі
5. Домашнє завдання (1 хв)
Вивчити даний матеріал .Розширити свої знання по темі використавши матеріали інтернет ресурсів
МАШИНИ ДЛЯ ЗБИРАННЯ БУРЯКІВ
ПЛАН-КОНСПЕКТ УРОКУ
ТЕРМІН ЧАСУ 2ГОД (1+1)
Тема : 51. Технологія збирання цукрових буряків.
Агротехнічні вимоги. 52. Бурякозбиральні машини
Навчальна дисципліна: Сільськогосподарські машини
Урок№_50 Дата проведення __________ Група ________
Мета навчального заняття:
* продовжити вивчення методів і прийомів виконання механізованих робіт у сільському господарстві та шляхів і засобів підвищення родючості ґрунтів.
Навчальна:
* сприяти збагаченню знань учнів про сільськогосподарське виробництво;
* сприяти активізації їх розумової діяльності;
* створювати умови для встановлення зв'язку теорії з практикою, з життєвими явищами і виробничими процесами.
Розвиваюча:
* продовжити розвиток умінь, пов'язаних зі сприйняттям і аналізом джерел;
* сприяти розвитку спостережливості і самостійного осмислювання окремих зв'язків, відносин, ознак між собою;
* продовжити виховання навичок культури мовного спілкування;
Виховна:
* продовжити виховання позитивного ставлення до професії Тракторист;
* сприяти формуванню глибокого пізнавального та емоційного інтересу до сільськогосподарського виробництва;
* сприяти прояву задоволеності своєю діяльністю.
Методи навчання:
• словесний;
• дослідний;.
Форма проведення уроку: комбінована
Форма навчальної діяльності: фронтальна, групова, Індивідуальна.
Засоби навчання:
* роздатковий матеріал;
* слово викладача;
• маркер;
• дошка.
• мультимедійний проектор
• компьютер
Хід уроку:
51. Технологія збирання цукрових буряків.
Агротехнічні вимоги
Збирання цукрових буряків пов’язане з біологічними особливостями цієї культури і кліматичними умовами збирального періоду, що припадає на кінець осені. Крім того, коренеплоди цукрових буряків бувають різної величини і неоднаково розміщені над поверхнею грунту, що ускладнює їх збирання.
Збирання буряків складається з операцій: підкопування коренів і порушення їх зв’язку з грунтом, витягування їх із землі, очищення від гички і землі, збирання окремих очищених коренів і гички і звезення їх до місця зберігання.
Для збирання буряків застосовують бурякозбиральні комбайни двох основних типів, які відрізняються один від одного послідовністю виконання робочих операцій. Комбайни першого типу — КС-3, КСТ-3 — спочатку підкопують корінь, витягують із землі і відрізують гичку. Комбайн другого типу — СКД-2 — зрізує гичку, коли корені ще в землі, а потім викопує їх копачами. Нині створено й випробовуються бурякозбиральні машини, які працюють послідовно. Це — гичкозбиральна машина БМ-6 і самохідна корнезбиральна машина КС-6. Крім комбайнового збирання буряків, застосовують ще роздільний спосіб, при якому корені буряків підкопують і трохи піднімають бурякопідіймачами, а потім їх витягують з грунту і очищають вручну.
Під час збирання цукрових буряків слід додержувати таких агротехнічних вимог: збирати треба в найкращі строки; починати збирання не дуже рано, бо в осінні дні в коренях підвищується цукристість, а закінчувати до настання морозів. Втрати буряків під час збирання бурякозбиральними машинами повинні бути якнайменшими. Поверхня зрізу з головок має бути рівною. Очищені корені буряків треба відразу відвозити на цукровий завод або складати для зберігання в кагати, закривати гичкою і прикопувати землею. Гичку буряків слід використовувати як зелений корм для тварин і силосування.
52. Бурякозбиральні машини
Бурякопідіймач СНУ-ЗР (Б — бурякопідіймач, Н — начіпний, У — універсальний, 3 — кількість рядків, Р — модель) призначений для підкопування цукрових буряків та інших ко-
![]()
![]()
 ренеплодів з наступи им вибиранням із землі вручну. Ширина захвату —1,35 м (3 рядки); найбільша глибина підкопування — 28 сле; продуктивність — 0,7 га/год. Навішують на трактори Т-25, ДТ-75, Т-70С і «Беларусь».
ренеплодів з наступи им вибиранням із землі вручну. Ширина захвату —1,35 м (3 рядки); найбільша глибина підкопування — 28 сле; продуктивність — 0,7 га/год. Навішують на трактори Т-25, ДТ-75, Т-70С і «Беларусь».
Бурякопідіймач (мал. 99) складається з трьох підкопу- вальних лап / з хомутами кріплення, порожнистого бруса З, двох цапф 5, стояка 4 для приєднання до начіпної системи трактора та двох опорних коліс 2. Підкопувальиі лапи мають внизу гвинтоподібну форміу. Рухаючись па відстані 3 см від коренів, на глибині, яка відповідає довжині кореня, вони підкопують і трохи піднімають буряк з грунту. їх можна встановлювати з міжряддями 44.5, 50 і 60 с.м. За допомогою гідравлічної системи трактора бурякопідіймач піднімають і опускають.
Бурякозбиральний комбайн КСТ-3 (К— комбайн, С— бурякозбиральний, Т — траиспортсри-наваитажувачі, З — кількість рядків) призначений для потокового і потоково перевалочного збирання цукрових буряків у всіх районах бурякосіяння. Ширина захвату— 1,35 м (3 рядки); агрегатують з тракторами Т-70С, ДТ-75 і «Беларусь»; продуктивність-—0,6 га/год.
Бурякокомбайн складається з основної рамп 3 (мал. 100) з причепом, двох ходових коліс 2 з пневматичними шинами, рухомої рами 4, двох копіювальних коліс 5, копір-водія 6, гичкопідіймачів, підколувальних лап, брального апарата 8, вирів- нювального і різального апаратів, елеватора 10 і бункера гички, очисника-навангажувача коренів 11, механізму передавання руху від вала відбору потужності трактора, гідравлічної системи для спрямування руху комбайна по рядках і піднімання та опускання рухомої рами з робочими органами. На комбайні встановлено дві фари, які живляться від системи електрообладнання трактора. Для комбайнера обладнана площадка керування 9 з сидінням.
Гичкопідіймачі піднімають розлоге листя буряків і зводять у пучок. На кожний рядок буряків припадає два гичкопідіймачі: правий і лівий. Кожний гичкопідіймач складається з обтічника і кронштейна, за допомогою якого його кріплять до рухомої рами.
Підкопувальиі лапи призначені для порушення зв’язку коренів буряків з грунтом. На комбайні КСТ-3 встановлено три лапи для підкопування трьох рядків буряків за один прохід.
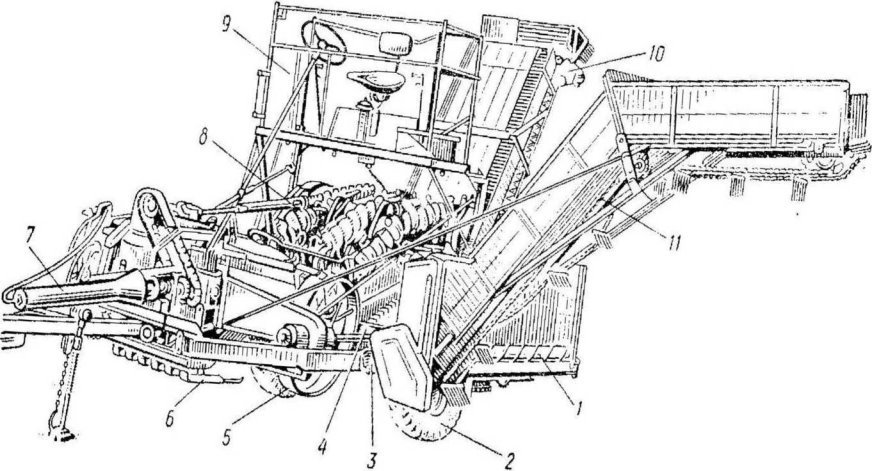
.........
ГНдкопувальна лапа складається з робочої частини, стояка, розпушувального пера і рамки з хомутом кріплення.
Бральні апарати призначені для витягування коренів із землі, транспортування їх до вирівнювального апарата, підтягування за гичку під час вирівнювання висоти буряків і придержування в момент відрізання гички.
Бральний апарат складається з трьох однакових за будовою ланцюгових секцій, установлених на рухомій рамі під кутом 35° до горизонту. Кожна ланцюгова секція (мал. 101) складається з основних 12 і проміжних 11 ланок, шарнірно з’єднаних між собою за допомогою штирів 9. До кожної основної ланки прикріплені права 1 і ліва 3 штамповані бральні лапи з пальцями 5. Між лапами встановлена стискна пружина 2. Бральний ланцюг натягнутий на верхній ведучий і нижній ведений вали; під верхньою віткою, крім того, встановлено напрямний ролик. Розкриваються бральні лапи під час натискання конічних дисків верхнього або нижнього валів на пальці 5, коли лапи проходять між ними. Закриваються лапи пружинами 2 після того, як пальці вийдуть з конусів.
Вирівнювальні апарати підрівнюють висоту буряків перед обрізанням гички і підтримують корені під час обрізування. Проти кожної секції брального апарата встановлено один вирівнювач (мал. 102), який складається з редуктора 2 із стаканом 3, пальцьового диска 6, чистика пальців 8, напрямної вилки 5, опорного конуса 7, гичкознімача 9 і гичковідвода 4.
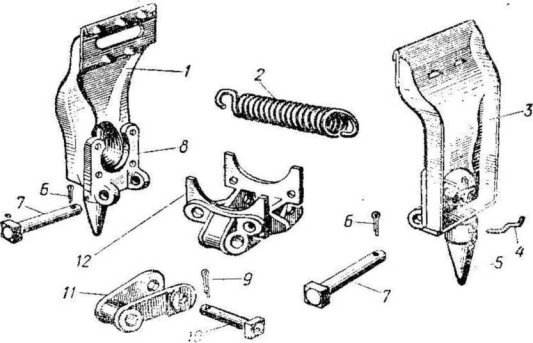
Мал. 10і Деталі брального апарата:
І прана бральна лапа; 2— пружина, З— ліва бральна лапа; 4 —сухарики крігі.ті-кпя цружиин; 5 — конічний палець; 5 — шплінт; 7 — довгий штир; 8 — цмини н-іін бральної лапи; 9—шплінт; 10 — короткий штир; 11 і 12— проміжна і оспина а ■і.<пкп брального ланцюга.
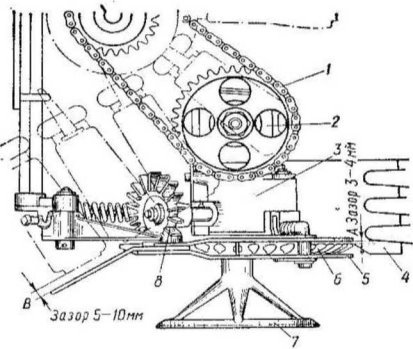
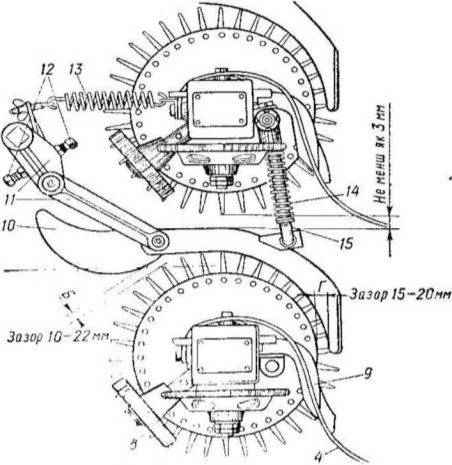
Мал. 1Ю2. Вирівнювач:
/ — ланцюг; 2 — редуктор; 3 — стакан; 4 — гнчковідвід; 5 — напрямна вилка: б — пальцьовий диск; 7— опорний конус: 3 — чистик пяльцік; 9 — пінкознімач; 10 носик ьилки: // — двоплечий важіль: /2 гіиінти регулювання напрямної пилки: /3—пружина важеля; /■/ — пружина штока; /.5 — щиток; .-I, Z>, И, Г — зазори.
![]()

![]()
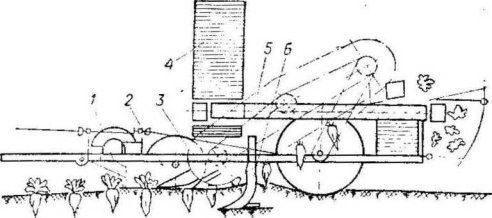
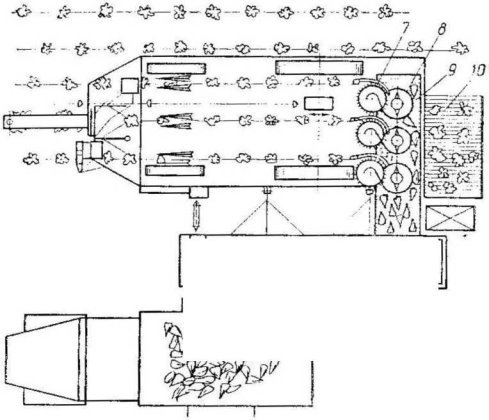

Різальні апарати встановлено за кожним вирівнювачем. Призначення їх — відрізати головку буряка з гичкою і відкидати на елеватор. Кожний різальний апарат складається з редуктора із стаканом, бітера, дискового ножа і нижнього та верхнього фланців кріплення ножа.
Гідравлічний пристрій для автоматичного спрямування руху по рядках комбайна складається з шестеренчастого насоса»
гідравлічного розподільника силового циліндра двосторонньої дії для керування комбайном у поперечному напрямі, копір- водія, коректувальника для встановлення копір-водія в рядки і з’єднувальних шлангів.
Комбайн КСТ-3 (мал. 103) працює так. На початку загінки комбайнер опускає рухому раму з робочими органами, копір- водієм 1 та копіювальними колесами і водночас включає головний карданний вал. Під час робочого руху агрегату в загінці гичкопідіймачі 2 підбирають листя гички, стискують у пучок і спрямовують до розкритих лап брального апарата <?, які затискують гичку буряка. В цей час підкопувальні лапи 6 підкопують і трохи піднімають корінь буряка. Бральний апарат вириває корінь із землі і переносить до вирівнювачів 7. Між диском і опорним конусом вирівнювача корені буряків вирівнюються по висоті і підводяться до різального апарата 8, який відрізує головки буряків з гичкою. Одночасно бральні лапи повністю розкриваються, звільняючи гичку, а бітер відкидає її на елеватор, який подає гичку на транспортер для вивантаження в тару. Корені буряків падають на прутиковий елеватор, що виносить їх па шнековий очисник-навантажувач 5, де вони остаточно очищаються від землі, необрізаної гички, рослинних решток і навантажуються в транспортні засоби.
Очисник-навантажувач скорочує трудові затрати при збиранні буряків, поліпшує якість їх очищення і збільшує частку коренів, придатних для здавання на цукрові заводи без додаткових затрат праці на доочищення (потоковим способом).
Бурякозбиральний комбайн СКД-2А (С — бурякозбиральний, К — комбайн, Д — дискові копачі, 2 — кількість рядків, А — модель) (мал. 104, а) призначений для збирання цукрових буряків з міжряддям 45 і 60 см у районах неполивного і поливного бурякосіяння.
Агрегатують комбайн з трактором «Беларусь» усіх модифікацій; глибина ходу копачів — 80—120 мм; продуктивність — 0,41 га/год.
Комбайн СКД-2А працює так (мал. 104,6). Під час руху агрегату в загінці копір-водії 4 спрямовують гичкозрізувальнпй і викопувальний апарати по рядках буряків. Опорне колесо З і гребінчасті копіри 2, з’єднані з гичкозрізувальними ножами, копіюють рельєф поля і висоту головок буряків, забезпечуючи правильне зрізування гички. Після зрізання ножі відкидають гичку на транспортер 5, звідти бітер 6 скидає її на елеватор 7, який подає в причіпний візок. Корені буряків (без гички) витискуються з грунту дисковими копачами /2, виштовхуються і відкидаються гумовими билами 11 на кулачковий очисник 10. Спочатку на кулачковому, а потім на шнековому очиснику вони очищаються від землі і рослинних решток і подаються елеватором 13 у транспортні засоби, що рухаються поруч з комбайном.
Гичкозбиральна машина БМ.-6 призначена для
![]()

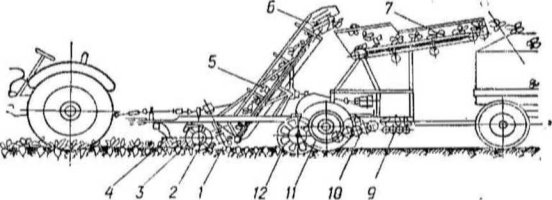
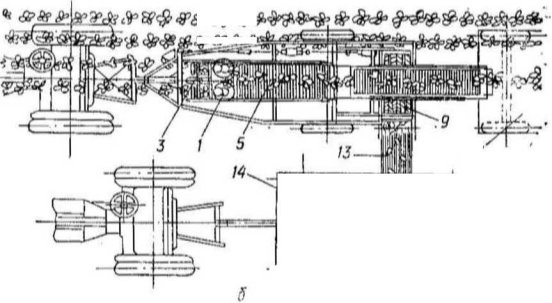
![]()
Мял. 104. Бурякозбиральний комбайн СКД-2А;
а — загальний вигляд, <1 — технологічна схеми; / — різальний апарат; 2 — колір го-
ловок коренів; <У — опорно колесо; •/- копір.водій; .5поздовжній транспортер гички;
6 СІтер; 7 —еленптор, к бункер гички; Р—очисник головок коренів; /0- кулач-
к< иіій очисник; It—ijmohI била, /2 —копачі; ІЗ—поперечний транспортер; /'/—кузов
дли корен In.
з
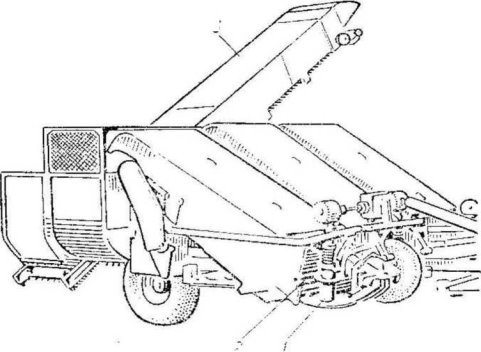
Мал. 105. Гичкозбиральна машина ВМ-6;
1 — гичкозрізувальнпй апарат, 2 — елеватор гички; ? — на вантажу вальний транспортер
зрізування гички цукрових буряків і навантаження її в транспортні засоби. Агрегатується з тракторами ДТ-75, ДТ-75М5. Ширина захвату — 6 рядків з міжряддям 45 см; продуктивність— 1,5 гаїгод.
Робочими органами є гичкозрізувальний апарат І (мал. 105) дискового або сегментного типу, пасовий очисник, який очищає ділянку від бур’янів І незрізаної гички. Зрізана гичка за допомогою транспортера З навантажується в транспортні засоби, що рухаються поряд.
К о р е н е з б и р а л ьп а машина К.С-6 (мал. 106) призначена для викопування коренів цукрових буряків, з яких зрізана гичка, для очищення їх віл землі і рослинних решток та навантаження в транспорт пі засоби. Ширина захвату — 2,7 л/ (6 рядків); продуктивність 1,35-2,43 гаїгод.
Машина КС-6 самохідна, двигун СМД-64 потужністю 150 к. с. приводить у рух ходову частину і робочі органи машини.
Робочими органами є копачі 1 активного типу, шнековий очисник коренів 2, пристрій для подрібнення грудок землі З, транспортер коренів 5, кулачковий очисник коренів 6. елеватори коренів 4 і 7.
Буряконавантажувач СНТ-2,1Б (мал. 107) призначений для навантажування коренів цукрових буряків з польових куч і кагатів у 'транспортні засоби. Ширина захвату — 2,1 м;
![]()

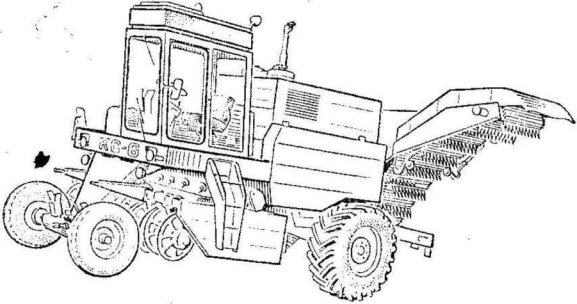
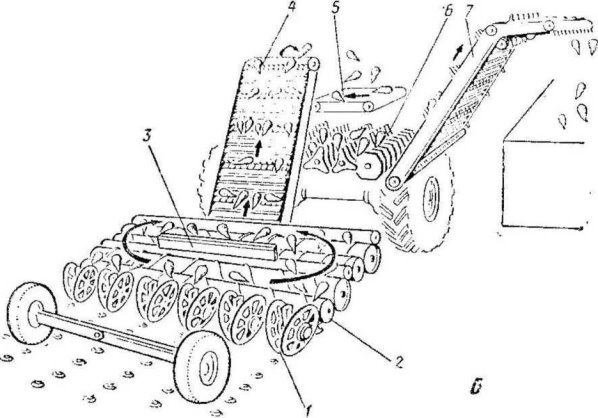
Мал. 106. Коренезбиральна машина КС-6
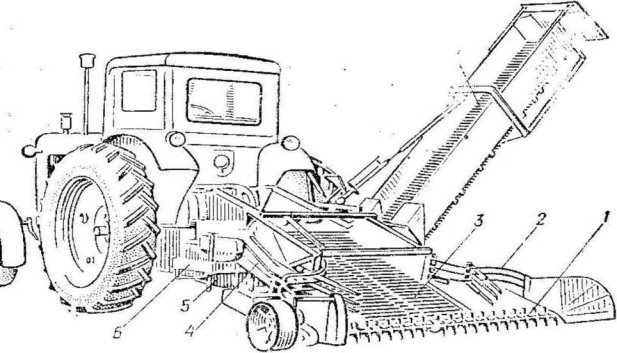
Мал. 107. Буряконавантажувач СНТ-2,1Б:
гг.ильник; 2 — вила; 3— поздовжній транспортер; 4 — рухома рама; 5—поперечний транспортер; б — головна рама; 7— елеватор.
.утішність— до ЗО т/год\ агрегатується з тракторами МТЗ-80
'обочими органами буряконавантажувача є живильник 1, поздовжній транспортер з вилами 2, поперечний транспортер . елеватор 7.
Організаційна діяльність викладача:
1. Організаційний момент (5 хв)
Підготувати учнів до роботи
2. Цілепокладання, мотивація (5 хв)
Спонукати до активного сприйняття і осмислювання матеріалу, викликати інтерес і активність, створити творчу атмосферу колективної роботи.
Визначити тему, цілі і завдання уроку
3. Вивчення нового матеріалу(30 хв)
КОНСПЕКТ УРОКУ
4. Узагальнення нових знань(4 хв)
Розкрити спектр думок по заданій темі
5. Домашнє завдання (1 хв)
Вивчити даний матеріал .Розширити свої знання по темі використавши матеріали інтернет ресурсів
ПЛАН-КОНСПЕКТ УРОКУ
ТЕРМІН ЧАСУ 2ГОД (1+1)
Тема : 53. Підготовка до роботи бурякозбиральних омбайнІв та організація їх роботи
Навчальна дисципліна: Сільськогосподарські машини
Урок№__51 Дата проведення __________ Група ________
Мета навчального заняття:
* продовжити вивчення методів і прийомів виконання механізованих робіт у сільському господарстві та шляхів і засобів підвищення родючості ґрунтів.
Навчальна:
* сприяти збагаченню знань учнів про сільськогосподарське виробництво;
* сприяти активізації їх розумової діяльності;
* створювати умови для встановлення зв'язку теорії з практикою, з життєвими явищами і виробничими процесами.
Розвиваюча:
* продовжити розвиток умінь, пов'язаних зі сприйняттям і аналізом джерел;
* сприяти розвитку спостережливості і самостійного осмислювання окремих зв'язків, відносин, ознак між собою;
* продовжити виховання навичок культури мовного спілкування;
Виховна:
* продовжити виховання позитивного ставлення до професії Тракторист;
* сприяти формуванню глибокого пізнавального та емоційного інтересу до сільськогосподарського виробництва;
* сприяти прояву задоволеності своєю діяльністю.
Методи навчання:
• словесний;
• дослідний;.
Форма проведення уроку: комбінована
Форма навчальної діяльності: фронтальна, групова, Індивідуальна.
Засоби навчання:
* роздатковий матеріал;
* слово викладача;
• маркер;
• дошка.
• мультимедійний проектор
• компьютер
Хід уроку:
Організаційна діяльність викладача:
1. Організаційний момент (5 хв)
Підготувати учнів до роботи
2. Цілепокладання, мотивація (5 хв)
Спонукати до активного сприйняття і осмислювання матеріалу, викликати інтерес і активність, створити творчу атмосферу колективної роботи.
Визначити тему, цілі і завдання уроку
3. Вивчення нового матеріалу(30 хв)
КОНСПЕКТ УРОКУ
53. Підготовка до роботи бурякозбиральних омбайнІв та організація їх роботи
Іеред початком збирання вибирають спосіб руху бурякозби- ного агрегату і розбивають поле на загінки. Як показує ід, найкращий спосіб руху при збиранні буряків комбайном іінований, при якому ('початку збирають у розгін, тобто роб- колові об’їзди загінки за рухом годинникової стрілки. Під іершого колового об’їзду загінки гичку і очищені корені ку- [ вивантажуючі., на незібраному полі. Гичку відразу ваво- а буряки перебирають. доочищають вручну і скидають у
міру зменшення ширини загінки, коли важче стає иоверта- 'регат на кінцях гону, буряки збирають тільки з одного бодри зворотному заїзді комбайн іде на суміжну загінку з рішпього її боку. З цього моменту збирають всклад, а ко- об’їзди роблять проти руху годинникової стрілки, омбінований спосіб руху агрегату під час збирання буряків очує час його холостих переїздів на кінцевих поворотах,. виключає ручні роботи по підготовці загінки і забезпечує безперебійну роботу всіх ланок колгоспу, закріплених за бурякозбиральним комбайном. Визначаючи розміри загінки, враховують найменший радіус повороту агрегату (8—10 м), щоб межі загінки проходили на стикових міжряддях і кількість рядків у загінці була кратною кількості рядків, які викопує машина за один захват. Найвигідніша довжина загонів — 800—1000 м.
До початку роботи в полі перевіряють технічний стан комбайна, затяжку всіх гайок і болтів, дію механізмів, регулювання робочих органів, змащують усі тертьові частини за таблицею мащення. На початку роботи у полі остаточно регулюють робочі органи комбайна і перевіряють положення гичкопідіймачів. Носки їх повинні торкатися землі, але не зариватися в землю. Відстань між носками обтічників гичкопідіймачів має бути 230— 250 мм, а у вихідній частині — 70—80 мм.
Потім перевіряють правильність установлення підкопувальних лап на глибину, у поздовжньому і поперечному напрямах. На глибину підкопувальиі лапи встановлюють залежно від довжини коренів. Не слід допускати зайвого заглиблення, бо це збільшує тяговий опір і витрату пального. Недостатнє заглиблення підкопувальних лап призводить до втрати цукристої маси буряків.
Щоб правильно встановити лапи в поздовжньому напрямі, поєднують моменти брання і підкопування буряків. Залежно від стану грунту кожна лапа разом з рамкою кріплення переставляється по похилій поверхні рухомої рами вперед або назад, щоб під час роботи на розпушеному вологому грунті носок лапи відступав уперед від осі веденого ролика брального ланцюга на 30—40 мм, на сухому грунті — назад на 30—40 мм, а при нормальній вологості грунту був проти осі веденого ролика. Після кожного поздовжнього регулювання перевіряють глибину встановлення підкопувальних лап.
У поперечному напрямі лапу встановлюють так, щоб осьова лінія підіймального пера її була проти осі брального ланцюга. Натяг ланцюгів брального апарата повинен бути таким, щоб вони трохи провисали; просвіт між кромками бральних лап і верхньою поверхнею носка напрямної вилки повинен бути 5—10 мм.
Бральні ланцюги встановлюють так, щоб відстань від головки буряка до кромок нижніх бральних лап становила 40—50 мм. Під час роботи залежно від стану гички і висоти розташування головок буряків над рівнем грунту цю відстань змінюють на ходу. Перевіряють величину розкривання бральних лап на нижньому валі, яка повинна становити 170—200 мм, а також момент повного розкривання бральних лап.
Перевіряючи вирівнювачі, особливу увагу звертають на стан пальців. Вони мають бути рівними, при провертанні механізмів комбайна вручну їх кінці не повинні торкатися кромок напрямних вилок. Зазор між кіпцями пальців і внутрішнього кромкою напрямної вилки має становити 5—10 мм, а між диском і кромкою вилки (на виході) — 10—15 мм.
Регулювання різальних апаратів комбайна зводиться до встановлення зазора між площиною диска ножа і нижньою штабою напрямної вилки вирівнювача. Залежно від форми головок і діаметра коренів буряків установлюють зазор: при діаметрі коренів від 40 до 80 мм—-8—11 мм, при діаметрі коренів від 81 до 120 мм— 14—17 мм. Між ножем і фланцями не може бути люфту.
Контроль якості. Роботу комбайна вважають задовільною, якщо корені не мають механічних пошкоджень, 80% їх не потребує додаткового очищення, втрати при підкопуванні коренів не перевищують 3—4%.
Техніка безпек и. Слід стежити за міцністю закріплення сидіння і справністю механізмів керування, за наявністю і справністю захисних пристроїв передавальних механізмів.
4. Узагальнення нових знань(4 хв)
Розкрити спектр думок по заданій темі
5. Домашнє завдання (1 хв)
Вивчити даний матеріал .Розширити свої знання по темі використавши матеріали інтернет ресурсів
ПЛАН-КОНСПЕКТ УРОКУ ЛПЗ
ТЕРМІН ЧАСУ 1ГОД.
Тема : Вивчення будови коренезбиральних машин їх регулювання.
Навчальна дисципліна: Сільськогосподарські машини
Урок№__52_ Дата проведення __________ Група ________
Мета навчального заняття:
* продовжити вивчення методів і прийомів виконання механізованих робіт у сільському господарстві та шляхів і засобів підвищення родючості ґрунтів.
Навчальна:
* сприяти збагаченню знань учнів про сільськогосподарське виробництво;
* сприяти активізації їх розумової діяльності;
* створювати умови для встановлення зв'язку теорії з практикою, з життєвими явищами і виробничими процесами.
Розвиваюча:
* продовжити розвиток умінь, пов'язаних зі сприйняттям і аналізом джерел;
* сприяти розвитку спостережливості і самостійного осмислювання окремих зв'язків, відносин, ознак між собою;
* продовжити виховання навичок культури мовного спілкування;
Виховна:
* продовжити виховання позитивного ставлення до професії Тракторист;
* сприяти формуванню глибокого пізнавального та емоційного інтересу до сільськогосподарського виробництва;
* сприяти прояву задоволеності своєю діяльністю.
Методи навчання:
• словесний;
• дослідний;.
Форма проведення уроку: комбінована
Форма навчальної діяльності: фронтальна, групова, Індивідуальна.
Засоби навчання:
* роздатковий матеріал;
* слово викладача;
• маркер;
• дошка.
• мультимедійний проектор
• компьютер
Хід уроку:
Організаційна діяльність викладача:
1. Організаційний момент (5 хв)
Підготувати учнів до роботи
2. Цілепокладання, мотивація (5 хв)
Спонукати до активного сприйняття і осмислювання матеріалу, викликати інтерес і активність, створити творчу атмосферу колективної роботи.
Визначити тему, цілі і завдання уроку
3. Вивчення нового матеріалу(30 хв)
КОНСПЕКТ УРОКУ
1. Мета роботи: вивчити будову, процес роботи та регулювання коренезбиральної машини КС-6Б. Ознайомитись з особливостями конструкції самохідної коренезбиральної машини РКС-6 (МКК-6). Ознайомитись з підготовкою машин до роботи.
2. Тривалість заняття – 1 академічна година.
3. Обладнання робочого місця: коренезбиральна машина КС-6, плакати, стенд з робочими органами.
4. Місце проведення заняття: лабораторія с.-г. машин.
5. Загальні відомості
Для збирання коренеплодів цукрових і кормових буряків використовують чотири- і шестирядні самохідні коренезбиральні машини і бункерні комбайни, а також причіпні та навісні копачі-валкоутворювачі і підбирачі валків. Базовими вітчизняними моделями цих машин є самохідні машини КС-6Б(В), МКК-6, РКМ-6, а також комплекс причіпних машин КВЦБ-1,2 (копач-валкоутворювач) і КНБ-6 (підбирач валків) концерну «Борекс».
Коренезбиральна машина МКК-6-02 (рис. 29.1) призначена для збирання коренеплодів цукрових буряків, що посіяні з шириною міжрядь 45 см і складається з основної рами 1, на якій змонтовано коренезбиральну частину та встановлено трактор 13 МТЗ-80/80Л із демонтованими ведучими колесами, мостом керованих коліс, механізмом задньої начіпки. Робочі органи коренезбиральної частини приводяться в рух від ВВП трактора.
Коренезбиральна частина має основну раму 1, яка опирається на мости ведучих 12 і керованих 3 коліс, дві секції вилчастих викопувальних пристроїв 4, приймальний лопатевий конвеєр-очисник 9, шнековий очисник вороху 10, поздовжній 11 і поперечний 16 конвеєри, вивантажувальний елеватор 14, механізм рульового керування, трансмісію, електричну і гідравлічну системи, автомат керування машини по осі рядків, систему контролю та сигналізації УСАК-6В.
Викопувальний пристрій, або копач (див. рис. 29.2), призначений для викопування коренеплодів цукрових буряків, попереднього очищення вороху від домішок і його транспортування на шнековий очисник. Копач має ліву і праву секції, кожна з яких складається із рами 2, на якій змонтовано три пари активних вилок 6, три пари коренезабірників 1, металевий бітер-виштовхувач 3 і приймальний лопатевий конвеєр-очисник, виконаний у вигляді послідовно розміщених прогумованих бітерних валів.
Секції копача шарнірно з’єднані з основною рамою машини і в роботі опираються на кронштейни рамки копіювальних коліс, завдяки чому відбувається незалежне копіювання рельєфу ґрунту кожною рамкою.
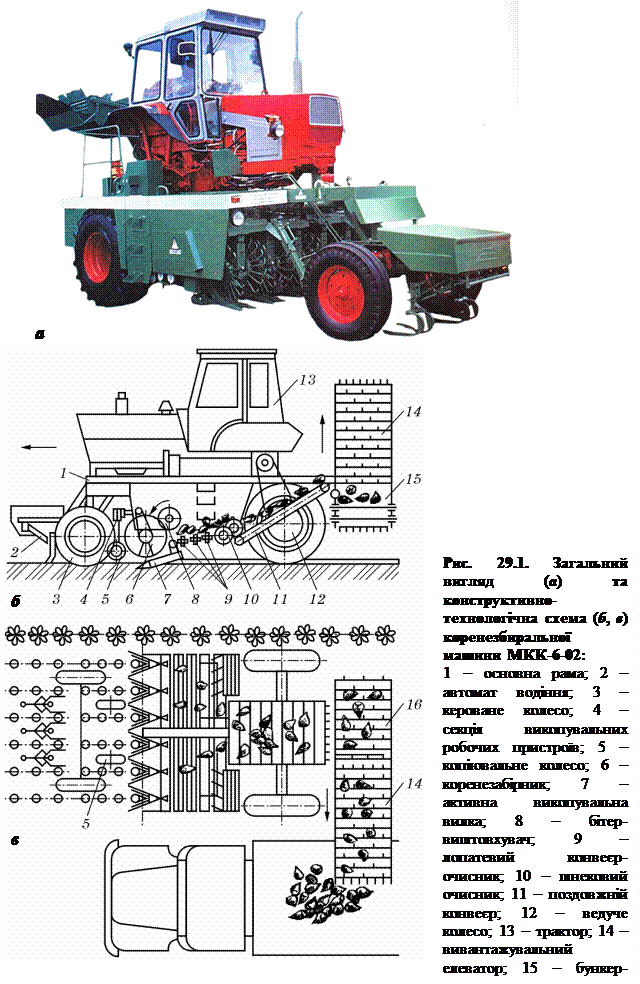
|
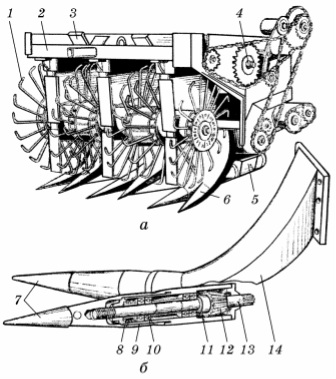
Активна вилка (див. рис. 29.2, б) призначена для викопування коренеплодів із ґрунту. Вона складається з двох конусів 7, які обертаються в протилежні боки і змонтовані на хвостовиках валів 13 і шестерень 12. Конусні вилки встановлені на кронштейні 14, який закріплений на рамі викопувального пристрою. Діаметр циліндра вилки 72 мм, довжина активної частини 332 мм. Частота обертання конусів 7 становить 423 об/хв, глибина ходу вилок – 5...12 см.
Коренезабірник 1 призначений для захоплювання коренів і передачі їх на приймальний лопатевий конвеєр-очисник. Він складається із зварного корпусу, верхнього ведучого вала, ведучої і веденої зірочок, маточини з поздовжнім пазом, маточин і півосей із сухарями. На півосях закріплені диски, які розміщені під кутом один до одного. Верхній ведучий вал коренезабірника приводиться в рух від вала контрприводу через з’єднувальний валик. Ланцюгова передача коренезабірника передає обертання з верхнього вала на нижню зірочку і далі через сухарі і півосі на диски з прутковими лапами. Діаметр дисків 700 мм, частота обертання 99 об/хв.
Приймальний лопатевий конвеєр-очисник призначений для очищення вороху від землі та рослинних домішок і подальшого подавання його на шнековий конвеєр. Він складається з трьох бітерних валів, які виконані у вигляді радіально розміщених гумових лопатей. Перші два вали мають по чотири лопаті, а третій – шість. Частота обертання двох чотирилопатевих бітерів становить 188 об/хв, а шестилопатевого – 289 об/хв.
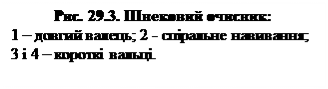
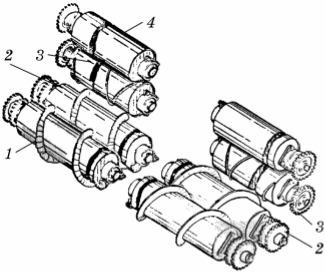 Шнековий очисник (рис. 29.3) машини МКК-6-02 призна-чений для часткового подальшого очищення вороху цукрових буряків від землі та рослинних домішок і зміщення й подавання його з приймальних конвеєрів двох секцій викопуваль-ного робочого органу на центральний поздовжній конвеєр. Він складається з правої та лівої секцій, кожна з яких має вигляд двох довгих 1 і двох коротких 3, 4 вальців, які закріплені в сферичних підшипникових опорах на основній рамі машини. На деякій визначеній довжині нижні вальці кожної секції мають спіральне навивання 2 із стрічки, а короткий валець 3 – із круга для зміщення вороху на поздовжній конвеєр. Валець 3 на кінці має зворотний виток, який обрізує рослинні залишки, що захоплюються шнековим конвеєром. Верхній валець 4 виконаний гладеньким. Вальці мають однаковий напрямок обертання. Частота обертання спіральних вальців становить 289 об/хв, гладенького – 377 об/хв.
Шнековий очисник (рис. 29.3) машини МКК-6-02 призна-чений для часткового подальшого очищення вороху цукрових буряків від землі та рослинних домішок і зміщення й подавання його з приймальних конвеєрів двох секцій викопуваль-ного робочого органу на центральний поздовжній конвеєр. Він складається з правої та лівої секцій, кожна з яких має вигляд двох довгих 1 і двох коротких 3, 4 вальців, які закріплені в сферичних підшипникових опорах на основній рамі машини. На деякій визначеній довжині нижні вальці кожної секції мають спіральне навивання 2 із стрічки, а короткий валець 3 – із круга для зміщення вороху на поздовжній конвеєр. Валець 3 на кінці має зворотний виток, який обрізує рослинні залишки, що захоплюються шнековим конвеєром. Верхній валець 4 виконаний гладеньким. Вальці мають однаковий напрямок обертання. Частота обертання спіральних вальців становить 289 об/хв, гладенького – 377 об/хв.
Поздовжній і поперечний конвеєри призначені відповідно для забирання вороху від шнекового очисника і подавання його на поперечний конвеєр та від нього до вивантажувального.
Поздовжній конвеєр закріплений на основній рамі машини і складається з ведучого вала із запобіжною муфтою, полотна, ведених і підтримувальних роликів. На полотні конвеєра влаштовані скребки і клапан для очищення внутрішнього простору полотна. Полотно натягується автоматично за допомогою натяжних пристроїв.
Поперечний конвеєр є дном бункера-нагромаджувача. Він складається із полотна, ведених і підтримувальних роликів і ведучого вала, клапана очищення внутрішнього простору. Полотно конвеєрів має два втулково-роликових ланцюги, з’єднані між собою прутками з кроком 38,1 мм. На прутках з кроком 304,8 мм закріплені скребки 50 мм заввишки. Швидкість руху полотна конвеєра 1,22 м/с.
Вивантажувальний елеватор призначений для завантаження коренеплодів у кузов транспортного засобу, який рухається поряд із коренезбиральною машиною. На рамі конвеєра встановлені гребінка і козирок-зменшувач швидкості падіння коренеплодів, який запобігає їх пошкодженню і втратам. Ведучий вал, полотно із скребками, ведені і підтримувальні ролики виконані аналогічно поздовжньому конвеєру. Крок скребків 457,2 мм, висота – 142 мм.
Для заміни транспортних засобів без зупинення машини під час роботи передбачена можливість короткострокового вимкнення поперечного конвеєра і вивантажувального елеватора. У цей час коренеплоди нагромаджуються в перехідному бункері-нагромаджувачі 15, дном якого є поперечний конвеєр 16. Після заміни транспортних засобів вмикають привід конвеєрів і коренеплоди знову надходять у новий транспортний засіб.
Технологічні регулювання. Глибину ходу активних вилок регулюють за допомогою перестановки штирів і втулок у кронштейнах копіювальних коліс викопувального пристрою.
Копіри автомата водіння машини по рядках буряків регулюють залежно від розміру коренів. Відстань між пластинами суміжних копірів має бути на 2...3 см більшою за середній діаметр коренів і встановлюється зміщенням копіювальних пластин у горизонтальній площині. Паралельне положення пластин копірів відносно поверхні ґрунту для копірів-розпушувачів досягається поворотом у вертикальній площині пластин копірів у затискачах, для полозкових копірів – зміною довжини тяги паралелограмної підвіски копірів.
Коренезбиральна самохідна машина РКМ-6 призначена для викопування коренеплодів цукрових буряків, посіяних з міжряддями 45 см.
Машина РКМ-6 (рис. 29.4) складається із самохідного шасі, на рамі якого встановлено двигун 13 СМД-24-02 потужністю 118 кВт, міст ведучих коліс 9 з гідростатичним приводом ходової частини, міст керованих коліс 2, кабіну з органами керування 14, автомат керування машини по рядках 1 і коренезбиральну частину.
Основними робочими органами коренезбиральної частини є двосекційні викопувальні органи 5, встановлені у передній частині двох рухомих рам і шарнірно з’єднані з основною рамою, ліві і праві секції приймального лопатевого бітерного 6 і шнекового 7 очисників, які виконані у вигляді послідовно розміщених лопатевих і спіральних вальців, поздовжнього пруткового конвеєра 8, лопатевого бітерного доочисника вороху коренеплодів 10, поперечного конвеєра 11 і вивантажувального елеватора 12.
Залежно від комплектації змінного викопувального робочого органа розрізняють такі модифікації коренезбиральної машини: РКМ-6-02 комплектується ротаційно-вилчастими копачами, РКМ-6-03 – пасивними сферичнодисковими копачами (для збирання кормових буряків), РКМ-6-05 – дисковими копачами, будова і технологічний процес роботи яких відповідно аналогічні машинам МКК-6-02, МКК-6, КС-6Б(В).
Приймальний бітерний лопатевий очисник 6, шнековий очисник 7, поздовжній 8 і поперечний 11 конвеєри та вивантажувальний елеватор 12, бітерний лопатевий доочисник 10 за своєю будовою і технологічним процесом роботи аналогічні відповідним робочим органам коренезбиральної машини МКК-6-02.
Коренезбиральна машина КС-6Б призначена для збирання коренеплодів цукрових буряків, що посіяні з шириною міжрядь 45 см. Вона комплектується самохідним шасі та коренезбиральною частиною. У передній частині самохідного шасі влаштований автомат водіння для спрямування робочих органів по осі рядків коренеплодів.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

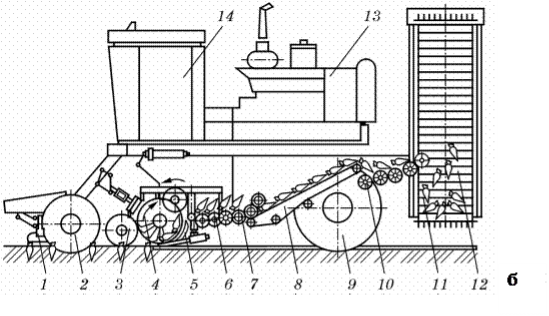
Рис. 29.4. Загальний вигляд (а) та конструктивно-технологічна схема (б) коренезбиральної машини РКМ-6:
1 – автомат керування; 2 – міст керованих коліс; 3 – копіювальне колесо; 4 – коренезабірник; 5 – активна викопувальна вилка; 6 – бітерний лопатевий очисник; 7 – шнековий очисник; 8 – поздовжній конвеєр; 9 – міст ведучих коліс; 10 – бітерний лопатевий доочисник; 11 – поперечний конвеєр; 12 – вивантажувальний елеватор; 13 – двигун; 14 – кабіна.
Коренезбиральна частина машини КС-6Б (рис. 29.5) складається із шести пар дискових копачів 3, лопатевого бітера-виштовхувача 4, шнекового очисного пристрою, виконаного у вигляді послідовно розташованих двох пар спіральних вальців 5 і розміщеного між ними та за другою парою вальців 5
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

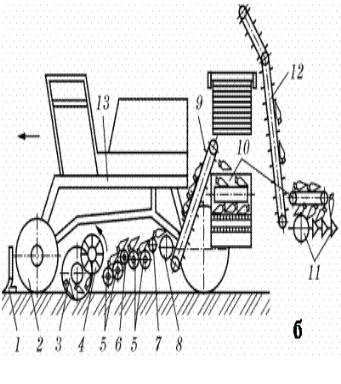
Рис. 29.5. Загальний вигляд (а) та конструктивно-технологічна схема (б)
коренезбиральної машини КС-6Б:
1 – копір-водій; 2 – передній міст керованих коліс; 3 – дисковий копач; 4 – лопатевий бітер-виштовхувач; 5 – пари спіральних вальців; 6 і 7 – перекидні вальці; 8 – проміжний бітер; 9 – поздовжній конвеєр; 10 – поперечний стрічковий конвеєр; 11 – конвеєр-грудкоподрібнювач; 12 – вивантажувальний елеватор; 13 – основна рама.
відповідно гладеньких перекидних вальців 6 і 7, проміжного бітера 8, поздовжнього конвеєра 9, бункерного поперечного стрічкового конвеєра 10, конвеєра-грудкоподрібнювача 11 та вивантажувального елеватора 12.
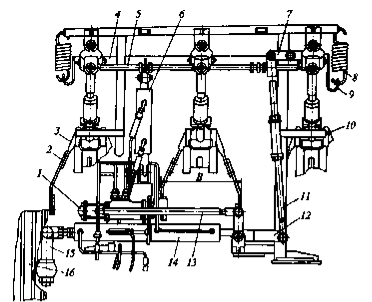 Копачі 3 та шнековий очисник змонтовані окремо на рамі викопувального пристрою, яка спирається на передній міст 2 керованих коліс і з’єднані з основною рамою 14 машини кульовим шарніром.
Копачі 3 та шнековий очисник змонтовані окремо на рамі викопувального пристрою, яка спирається на передній міст 2 керованих коліс і з’єднані з основною рамою 14 машини кульовим шарніром.
![]() Автомат водіння корене-збиральної машини по рядках (рис. 29.6) має три копіри 1 по-лозкоподібного типу або у виг-ляді стрілчастих лап, шарнірну підвіску копірів, дві поперечні тяги, поздовжню тягу, гідро-розподільник, гідроциліндри керування, коригування та гідроціліндр для переведення копірів із робочого положення і навпаки.
Автомат водіння корене-збиральної машини по рядках (рис. 29.6) має три копіри 1 по-лозкоподібного типу або у виг-ляді стрілчастих лап, шарнірну підвіску копірів, дві поперечні тяги, поздовжню тягу, гідро-розподільник, гідроциліндри керування, коригування та гідроціліндр для переведення копірів із робочого положення і навпаки.
Під час роботи датчики переміщаються по міжряддях коренеплодів, що підлягають викопуванню та копіюють їх відхилення, що примушує датчики зміщуватися в поперечному напрямі. Відхилення датчиків від нейтрального положення служить вхідним сигналом для автомата водіння.
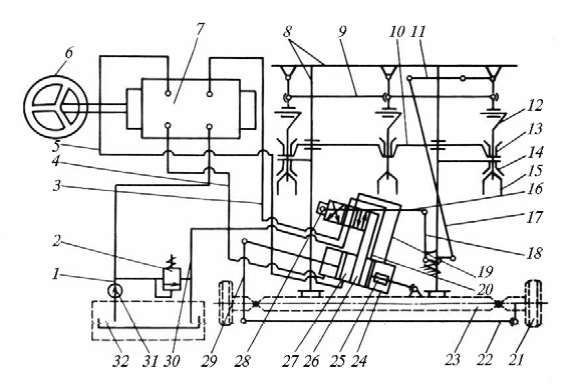 Гідравлічне управління автомата водіння (рис. 29.7) включає наступні основні вузли: резервуар 32, золотник 28, спарені гідроциліндри 24, 27, насос (НШ-10-Л) 31, насос-дозатор 7, оливопроводи 1, 3 – 5, 19, 20, 30 і запобіжний клапан 2. Спарені гідроциліндри (вони управляють передніми колесами 21) жорстко сполучені між собою торцями. Шток гідроциліндра 27 приєднаний до важеля 29 повороту керованих коліс, шток гідроциліндра 24 управління – до кронштейна балки моста 23.
Гідравлічне управління автомата водіння (рис. 29.7) включає наступні основні вузли: резервуар 32, золотник 28, спарені гідроциліндри 24, 27, насос (НШ-10-Л) 31, насос-дозатор 7, оливопроводи 1, 3 – 5, 19, 20, 30 і запобіжний клапан 2. Спарені гідроциліндри (вони управляють передніми колесами 21) жорстко сполучені між собою торцями. Шток гідроциліндра 27 приєднаний до важеля 29 повороту керованих коліс, шток гідроциліндра 24 управління – до кронштейна балки моста 23.
Рис. 29.7. Гідрокінематична схема автомата водіння машини КС-6Б.
Гідроциліндр 27 маслопроводами 4, 5 сполучений з насосом-дозатором 7, а гідроциліндр 24 управління рукавами 19, 20 – із золотником 28. У гідроциліндрі 24 встановлена втулка 25, що обмежує хід його корпуса в межах ± 25 мм. (При роботі машини виникають великі відхилення датчиків 15 із-за зіткнення з каменем або іншим чужорідним тілом. У цій ситуації втулка запобігає різким поворотам керованих коліс).
Планетарний насос-дозатор 7 забезпечує ручне управління машиною в транспортному положенні, а також при роботі без відключення автомата водіння. Він має корпус, в осьовому каналі якого встановлені рухомі розподільна втулка і золотник. Золотник приводиться в рух від нижньої частини рульового валу. У корпусі насоса розташовані перепускні і зворотні клапани.
Золотник 28 гідрокерування розподіляє потоки робочої рідини, що поступають від насоса, на злив (по оливопроводу 30 при нейтральному положенні плунжера золотника) і в одну з порожнин гідроциліндра 24 управління по маслопроводах 19, 20 з одночасним перепусканням масла з іншої порожнини гідроциліндра (якщо на плунжер поступив вхідний сигнал від датчиків 15 копіювального пристрою).
Працює гідравлічне керування в такій послідовності. Якщо водій не діє на рульове колесо 6, то золотник насоса-дозатора знаходиться в нейтральному положенні. При цьому масло, що нагнітається шестеренчастим насосом 31, через насос 7 і оливопроводи потрапляє в золотник 28 і далі по оливопроводу 30 зливається в резервуар. Коли водій виконує поворот рульового колеса, то переводить золотник в робоче положення. В результаті олива, що поступає від шестеренчастого насоса, проходить через насос-дозатор і по одному з оливопроводів в гідроциліндр 27. З іншої порожнини цього циліндра олива видавлюється рухомим поршнем і через насос-дозатор 7, золотник 28 і далі по оливопроводу 30 зливається в резервуар. В результаті шток гідроциліндра 27 через важіль 29 викликає поворот керованих коліс.
В процесі роботи машини в автоматичному режимі датчики 15 під дією коріння в рядках можуть зміститися вліво або управо. Тоді важелі 11, 18 і тяга 16, 17 передавального механізму змістять плунжер золотника з нейтрального в робоче положення. Олива по одному з оливопроводів 19, 20 поступатиме в гідроциліндр 24 і зливатиметься з нього. Відбудеться поперечне переміщення корпусу гідроциліндра керування, яке через гідроциліндр 27 і важіль 29 передасться на керовані колеса.
В процесі роботи машини можлива ситуація одночасної дії автомата водіння і рульового керування (наприклад, запобігання наїзду на перешкода, що несподівано з'явилася). В цьому випадку водій повертає рульове колесо в потрібну сторону, тим самим включає насос-дозатор, який направляє масло в відповідну порожнину гідроциліндра 27. Оскільки кут повороту рульового колеса не має межі, а відхилення датчиків обмежене вилками 13, то поршень гідроциліндра 27 може зміститися на достатню величину і відповідно повернути керовані колеса. При непрацюючому двигуні (під час буксирування машини), відсутності подачі оливи із-за несправності гідросистеми можна керувати машиною вручну, перекачуючи оливу насосом-дозатором з однієї порожнини гідроциліндра 27 в іншу. Проте управління машиною утруднюється, оскільки зусилля обертання рульового колеса зростає більш ніж в 10 раз (100...200 Н).
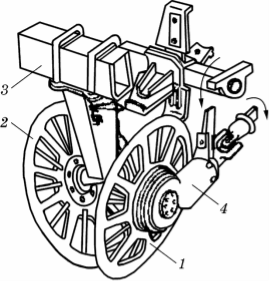 Дисковий копач (рис. 29.8) при-значений для викопування коренеплодів із ґрунту. Він складається з активного 1 і пасивного 2 штампованих дисків, уста-новлених під кутом до вертикалі і напрямку руху машини та змонтованих на рамі 3. Активний диск 1 приводиться в обертальний рух через редуктор 4. Часто-та обертання диска 92 об/хв. Діаметр дисків 680 мм.
Дисковий копач (рис. 29.8) при-значений для викопування коренеплодів із ґрунту. Він складається з активного 1 і пасивного 2 штампованих дисків, уста-новлених під кутом до вертикалі і напрямку руху машини та змонтованих на рамі 3. Активний диск 1 приводиться в обертальний рух через редуктор 4. Часто-та обертання диска 92 об/хв. Діаметр дисків 680 мм.
Шнековий очисник призначений для попереднього очищення вороху коренеплодів від ґрунту і рослинних домішок та подавання коренеплодів на поздовжній конвеєр 9 (див. рис. 29.5). Кожний шнековий очисник складається відповідно із двох пар спіральних вальців 5 і перекидних вальців 6 і 7. Передні спіральні вальці 5 переміщують коренеплоди на периферію, а задні – у центральну частину до поздовжнього конвеєра 9.
Поздовжній конвеєр 9 складається із верхньої та нижньої частин, з’єднаних між собою шарнірно, верхня частина також шарнірно прикріплена до основної рами 13.
Конвеєр-грудкоподрібнювач 11 розміщений під бункерним стрічковим конвеєром 10 і призначений для сепарації вороху від великорозмірних ґрунтових грудок та подавання коренеплодів до робочої гілки вивантажувального елеватора 12. Він складається з трьох послідовно розміщених тригранних кулачкових валів та одного вала з круглими дисками. Очисні вали обертаються в одному напрямку та з однаковою кутовою швидкістю.
Бункер призначений для нагромадження в ньому коренеплодів під час зміни технологічного транспорту. Він має каркасну будову. В бункері встановлені поперечний стрічковий конвеєр 10 і конвеєр-грудкоподрібнювач 11. Задня стінка бункера має прогумований фартух для пом’якшення ударної дії коренеплодів об стінку бункера.
Під час регулювання робочих органів коренезбиральної машин КС-6Б спочатку добиваються високої якості викопування коренеплодів, потім регулюють очисні пристрої.
У автомата водіння відстань В між подовжніми осями датчиків 3(див. рис. 29.6) повинна бути 450 мм. Досягається це зміною довжини поперечної тяги 5.
Глибину ходу розпушувача змінюють переміщенням його в утримувачі; заглиблення допускається не більше 30 мм. Перевіряють положення лез розпушувачів і добиваються, щоб вони були паралельні поверхні грунту. Для цього змінюють довжину верхньої тяги паралелограмного механізму кожного датчика.
Зазор між дисками копачів регулюють з урахуванням врожайності і розмірів коренеплодів. Якщо врожайність до 30 т/га і переважають дрібні коренеплоди, то встановлюють зазор 30...35 мм, при врожайності понад 30 т/га – зазор 40 ...50 мм. Перед регулюванням слід підняти копачів в транспортне положення закріпити фіксатором і під раму коренезабірника встановити підставки. Потім зняти диски і переставити регулювальні шайби. Щоб збільшити зазор, шайби встановлюють з внутрішньої сторони, зменшити – з зовнішньою.
Регулювання глибини ходу копачів слід починати з перевірки тиску повітря в шинах направляючих коліс (воно повинне бути 0,35 МПа).
Потім під направляючі колеса потрібно встановити підставки завтовшки відповідній заданій глибині ходу копачів. Одночасно під диски копачів помістити рейку завтовшки 25 мм, що відповідає зануренню коліс при роботі в польових умовах. Після цього диски опустити на рейку і вставити штирі (пальці) у отвори кронштейна балки, що співпали. Глибина ходу дисків-копачів (8...10 см) впливає на чистоту і повноту викопування коренеплодів. При недостатній глибині можливі обриви хвостової частини коріння, при надмірній – зростає забрудненість бурякового оберемка грунтом. Під час регулювання необхідно використовувати дані табл. 29.1.
Таблиця 29.1
Параметри встановлення автомата і викопувача коренеплодів машини КС-6Б
|
Найменування показників |
Значення показників при діаметрі коренів, мм |
|||
|
40...60 |
60...80 |
80...100 |
100...120 |
|
|
Відстань між лезами копірів-водіїв, мм |
70...90 |
90...100 |
110...130 |
130...150 |
|
Зазор в нижній точці між парою дискових копачів, мм |
|
|
|
|
|
Глибина ходу дисків копачів в грунті, мм |
60...70 |
70...80 |
80...90 |
90...100 |
|
Відстань між барабаном першого шнека-очищувача і кромкою диска копача, мм |
|
|
|
|
Лопатки бітерів повинні знаходитися в середині між дисками копачів. За необхідності слід ослабити стяжні болти і пересунути лопатки вздовж валу в потрібному напрямі. Довжину лопаток бітерів регулюють переставлянням накладок. Для кращого очищення копачів від вологого грунту довжину лопаток збільшують. На грунтах нормальної вологості, щоб не пошкодити коренеплоди, довжину лопаток зменшують.
У шнекового очищувача регулюють зазори між першим вальцем і другим шнеком, між другим вальцем і четвертим шнеком і між другим вальцем і передавальним бітером. Зазори між вальцями і шнеками змінюють перестановкою корпусів їх підшипників, а також прокладками різної товщини під ці корпуси. Зазори 50...60 мм встановлюють при врожайності буряків до 20 т/га і 60...80 мм – понад 20 т/га. Зазор між останнім вальцем і передавальними бітером (25...30 мм) регулюють зміною довжини тяги.
Грудкоподрібнювач працює на режимах I, II, III і IV, які встановлюють поворотом валів. Напрямок руху стрічкового конвеєра змінюють перестановкою ланцюга на верхню або нижню зірочки механізму приводу. Режим роботи грудкоподрібнювача (I, II, III – «подрібнення грудок» та I, II, III – «транспортування») встановлюють поворотом зірочок з позначками при роз’єднаному ланцюгу механізму приводу – для транспортувального режиму 90°, а для подрібнення грудок 45°. Установлюючи кут між прямолінійними гранями суміжних грудкоподрібнювальних валів, користуються спеціальним шаблоном.
Коренезбиральна бункерна машина КБ-6 призначена для двофазного збирання цукрових буряків, посіяних з шириною міжрядь 45 см, з яких попередньо зібрана гичка. Ширина захвату 2,7 м, робоча швидкість руху машини 5,0...9,0 км/год, продуктивність 1,3...2,4 га/год, місткість бункера 8 м3.
Машина КБ-6 (рис. 29.9) складається із самохідного шасі і коренезбиральної бункерної системи. На рамі 1 самохідного шасі встановлено кабіну 2 з органами керування; силову установку 3 з двигуном потужністю 173 кВт; бункер 4, який має рухоме дно, виконане у вигляді горизонтального конвеєра 5, і встановлені у верхній частині бункера 4 розрівнювальний шнековий конвеєр 6 і вивантажувальний елеватор 7; похилий жолоб 9; завантажувальний контурний конвеєр 10, який змонтовано по периферії бункера 4; поздовжній конвеєр 12; міст ведучих коліс 13; шнековий очисник 16; викопувальні диски 17 і міст керованих коліс 18.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

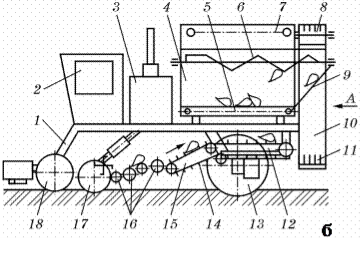
Рис. 29.9. Загальний вигляд (а)та конструктивно-технологічна схема (б)
коренезбиральної машини КБ-6.
Технологічний процес роботи на етапах викопування коренеплодів дисками 17 і первинної сепарації вороху шнековим очисником 16 коренезбиральної бункерної машини КБ-6 такий самий, як і базової машини КС-6Б. Після сепарації вороху шнеками очисника 16 коренеплоди з рослинними рештками і землею подаються на поздовжній конвеєр 12, з якого вони падають на завантажувальний контурний конвеєр 10. Скребки 11 конвеєра 10 транспортують коренеплоди у верхню частину бункера 4, де вони похилим жолобом 9 скочуються на нерухомий конвеєр 5, який є дном бункера 4. Під час заповнення бункера 4 коренеплодами розрівнювальний шнековий конвеєр рівномірно розподіляє коренеплоди відповідно до заповнення ними бункера 4.
Розвантажують бункер 4 за допомогою горизонтального конвеєра 5, яким коренеплоди переміщуються на вивантажувальний елеватор 7 і далі в транспортні засоби, що рухаються поряд із збиральною машиною.
Бурякозбиральний бункерний комбайн КСБ-6 «Збруч» призначений для однофазного збирання коренеплодів цукрових буряків, ширина міжрядь яких становить 45 см. Ширина захвату 2,7 м, робоча швидкість руху машини 5,0...9,0 км/год, продуктивність 1,3...2,4 га/год, місткість бункера 8 м3.
Комбайн комплектується змінними дисковими, ротаційно-вилчастими викопувальними пристроями і вібраційними копачами.
Гичкозбиральний пристрій складається з основної рами, яка спирається на передні та задні копіювальні колеса і на якій фронтально встановлено ротаційний зрізувальний вал із секційними шарнірними молотковими ножами, шнекового конвеєра для транспортування гички та доочисника головок коренеплодів – горизонтального вала з очисними елементами (будова цих робочих органів аналогічна будові відповідних робочих органів гичкозбиральної машини МБП-6).
Для збирання цукрових буряків у зарубіжних країнах використовується переважно однофазна технологія із застосуванням самохідних шестирядних потужних коренезбиральних комбайнів бункерного типу, наприклад SF-10 (фірма «Kleine» Німеччина, Vervaet 625 (об’єм бункера 25 т), ervaet 617 (17 т) Голландія) та десятирядних Vervaet 925 (25 т).
 Гичкозбиральний пристрій вказаних комбайнів – це активний ротор (0-1400 об/хв.) з пасивним доочисним пристроєм (рис. 29.10), що складається з горизонтально розміщеного, регульованого за висотою ножа 1 і, закріпле-ними над ним, притискачами гички 2.
Гичкозбиральний пристрій вказаних комбайнів – це активний ротор (0-1400 об/хв.) з пасивним доочисним пристроєм (рис. 29.10), що складається з горизонтально розміщеного, регульованого за висотою ножа 1 і, закріпле-ними над ним, притискачами гички 2.
Робочими органами переважної біль-шості зарубіжних бурякозбиральних комбайнів є підкопувальні активні лемеші (рис. 29.10, а), роторні транспортери-очисники (рис. 29.10, б) та осьові роликові доріжки (рис. 29.10, в).
|
|
|
|
|
|

Активні підкопувальні лемеші – це два незалежних коливних робочих органів, кожний з яких має незалежний привід. Переважне використання робочих органів такого типу знайшов на досить твердих і сухих (вологістю до 15%) грунтах.
Роторні транспортери-очисники – це послідовно встановлені турбіни з вертикальною віссю обертання. Робочими органами їх є підпружинені, зігнуті пальці та горизонтальний пальцевий корпус.
Осьові роликові доріжки – це послідовно встановлені вальці з витками на поверхні. Під час їх обертання відбувається дія витків на коренеплоди, що знаходяться на поверхні вальців, і таким чином відбувається очищення коренеплодів. Осьові роликові доріжки можуть встановлюватися замість роторних транспортерів-очисників.
6. Опис установки і методика експерименту
Визначення конструкції коренезбиральної машини КС-6, основні її технологічні регулювання, гідро-, електросистему проводиться на її натурному зразку безпосередньо на робочому місці. Звертають увагу на систему приводів робочих органів та механізмів.
Ознайомлення з конструкцією автомата водіння коренезбиральної машини та гідромеханічною схемою його управління проводиться безпосередньо на робочому місці.
Призначення та будову робочих органів коренезбиральної машини РКС-6 (РКМ-6) вивчають біля стенда, користуючись комплектами плакатів.
7. Послідовність виконання лабораторної роботи
7.1. Вивчити конструкцію коренезбиральної машини КС-6 безпосередньо на робочому місці. Засвоїти послідовність підготовки її до роботи.
7.2. Вивчити конструкцію автомата водіння коренезбиральної машини КС-6 по рядках безпосередньо на робочому місці. Засвоїти послідовність підготовки її до роботи.
7.3. Ознайомитись з конструкцією робочих органів коренезбиральної машини РКС-6 безпосередньо на робочому місці. Проаналізувати особливість приводу підкопувальних робочих органів.
7.4. Засвоїти послідовність регулювань робочих органів коренезбиральної машини та її автомата водіння
7.5. Користуючись слюсарним інструментом провести відповідні регулювання автомата водіння та підкопувальних робочих органів коренезбиральної машини.
7.6. Запустити двигун машин КС-6 і прослідкувати технологічний процес її роботи та автомата водіння машини по рядках.
7.8. Ознайомитись з гідравлічною системою коренезбиральної машини, особливістю приводу та режимами роботи конвеєра-грудкоподрібню-вача.
7.7. За результатами лабораторної роботи заповнити табл. 29.2 і зробити висновок.
Таблиця 29.2
Результати лабораторних досліджень коренезбиральних машин
|
Досліджувані параметри |
Значення параметрів |
|
|
|
|
КС-6 |
|
|
Відстань між лезами копірів-водіїв, мм |
|
|
Зазор в нижній точці між парою дискових копачів, мм |
|
|
Глибина ходу дисків копачів в грунті, мм |
|
|
Відстань між барабаном першого шнека-очищувача і кромкою диска копача, мм |
|
|
Діаметр дискових копачів, мм |
|
|
Діаметр бітера (за лопаткою), мм |
|
|
Діаметр шнекових очисників, мм |
|
|
Крок витків шнекових очисників |
|
|
Діаметр вальців, мм |
|
|
Тип поздовжнього транспортера |
|
|
Продовження табл. 29.2 |
|
|
|
|
|
Відстань між прутками поздовжнього транспортера, мм |
|
|
РКС-6 |
|
|
Відстань конусами активної вилками, мм |
|
|
Діаметр циліндра активної вилки, мм |
|
|
Довжина активної частини вилки, мм |
|
|
Діаметр коренезабірника, мм |
|
8. Зміст звіту
8.1. Накреслити схему коренезбиральної машини КС-6Б.
8.2. За наслідками лабораторних досліджень заповнити табл. 29.2 та зробити висновок по роботі.
9. Питання для самоконтролю.
9.1. Агротехнічні вимоги до збирання цукрових буряків.
9.2. Класифікація коренезбиральних машин, особливості конструкції.
9.3. Способи збирання цукрових буряків.
9.4. Типи підкопувальних робочих органів та їх характеристики.
9.5. Будова коренезбиральної машини КС-6.
9.6. Будова та принцип роботи автомата водіння машини по рядках.
9.7. Технологічний процес роботи коренезбиральної машини КС-6.
9.8. Регулювання копачів машини КС-6.
9.9. Особливості конструкції самохідної коренезбиральної машини РКС-6.
9.10. Підкопувальні робочі органи коренезбиральних машин і комбайнів та умови їх застосування.
9.11. Особливості конструкції бункерних коренезбиральних машин (комбайнів) КБ-6 та КСБ-6 «Збруч».
Бібліографічний список
1. Войтюк Д.Г., Гаврилюк Г.Р. Сільськогосподарські машини. – К.: Урожай, 1994. –С. 339-367.
2. Сільськогосподарські та меліоративні машини: Підручник / Д.Г. Войтюк, В.О. Дубровін, Т.Д. Іщенко та ін.; За ред. Д.Г. Войтюка – К.: Вища освіта, 2004. – С. 412-423.
3. Карпенко А.Н., Халанский В.М.Сельскохозяйственные машины. –М.: Агропромиздат, 1989. –С.363-368.
4. Листопад Г.Е., Демидов Г.К., Зонов Б.Д. и др. Сельскохозяйственные и мелиоративные машины. –М.: Агропромиздат, 1986.– С. 314-319.
5. Практикум з технологічної наладки та усунення несправностей сільськогосподарських машин / Г.Р. Гаврилюк, Г.І. Живолуп, П.С. Короткевич та ін. –К.: Урожай, 1995. – С.207-220
4. Узагальнення нових знань(4 хв)
Розкрити спектр думок по заданій темі
5. Домашнє завдання (1 хв)
Вивчити даний матеріал .Розширити свої знання по темі використавши матеріали інтернет ресурсів
ПЛАН-КОНСПЕКТ УРОКУ ЛПЗ
ТЕРМІН ЧАСУ 1 ГОД.
Тема : Вивчення будови гичкозбиральних машин та корененавантажувача їх регулювання.
Навчальна дисципліна: Сільськогосподарські машини
Урок№__53 Дата проведення __________ Група ________
Мета навчального заняття:
* продовжити вивчення методів і прийомів виконання механізованих робіт у сільському господарстві та шляхів і засобів підвищення родючості ґрунтів.
Навчальна:
* сприяти збагаченню знань учнів про сільськогосподарське виробництво;
* сприяти активізації їх розумової діяльності;
* створювати умови для встановлення зв'язку теорії з практикою, з життєвими явищами і виробничими процесами.
Розвиваюча:
* продовжити розвиток умінь, пов'язаних зі сприйняттям і аналізом джерел;
* сприяти розвитку спостережливості і самостійного осмислювання окремих зв'язків, відносин, ознак між собою;
* продовжити виховання навичок культури мовного спілкування;
Виховна:
* продовжити виховання позитивного ставлення до професії Тракторист;
* сприяти формуванню глибокого пізнавального та емоційного інтересу до сільськогосподарського виробництва;
* сприяти прояву задоволеності своєю діяльністю.
Методи навчання:
• словесний;
• дослідний;.
Форма проведення уроку: комбінована
Форма навчальної діяльності: фронтальна, групова, Індивідуальна.
Засоби навчання:
* роздатковий матеріал;
* слово викладача;
• маркер;
• дошка.
• мультимедійний проектор
• компьютер
Хід уроку:
Організаційна діяльність викладача:
1. Організаційний момент (5 хв)
Підготувати учнів до роботи
2. Цілепокладання, мотивація (5 хв)
Спонукати до активного сприйняття і осмислювання матеріалу, викликати інтерес і активність, створити творчу атмосферу колективної роботи.
Визначити тему, цілі і завдання уроку
3. Вивчення нового матеріалу(30 хв)
КОНСПЕКТ УРОКУ
Гичкозбиральна машина БМ-6Б
|
|
Гичкозбиральні машини зрізують гичку цукрових і кормових буряків і подають її у транспортні засоби, їх обладнують різальними апаратами дискового типу і ротаційно-барабанними. Для збирання гички використовують машини БМ-6Б, БМ-4Б, МБП-6, МБК-2,7, МГ-6, МГІП-6 та ін.
Гичкозбиральна машина БМ-6Бпричіпна і призначена для збирання гички цукрових буряків, посіяних з міжряддями 45 см. Агрегатують її з тракторами класу 1,4, 2 і 3.
Основними складальними одиницями гичкозбиральної машини є дві секції гичкозрізувальних апаратів, два приймальних (поздовжніх) транспортери 5 (рис. 11.3), два проміжних бітери 6, поперечний транспортер 9, прутковий перетрушувач гички, вивантажувальний елеватор 7, два бітери 8 кидального пристрою, очисник головок коренеплодів, основна рама, два опорних пневматичних колеса 10, механізми передач, причіпний і гідрослідкуючий пристрої, гідросистема машини та система контролю і сигналізації.
Гідрослідкуючий пристрій призначений для спрямування робочих органів машини по осі рядків. Пристрій складається з двох копір-водіїв 1, які шарнірно з'єднані з поперечною тягою, коромисла, гідророзподільника, силового гідроциліндра та системи маслопроводів. У разі відхилення рядків від напрямку руху машин копір-водії переміщуються головками коренеплодів ліворуч чи праворуч і через поперечну тягу та коромисло виводять золотник гідророзподільника з нейтрального положення. При цьому масло під тиском подається в силовий гідроциліндр, шток якого переміщується і зміщує основну раму машини у відповідний бік.
Кожна з двох секцій гичкозрізувальних апаратів має три різальних апарати, які встановлені в передній частині рухомої рами. Апарат складається з гребінчастого копіра 2 (рис. 11.1), дискового ножа 9 і бітера 8. Копір 2 з'єднується з дисковим ножем гвинтовою тягою 7, а з рухомою рамою секції - за допомогою паралелограмної підвіски.
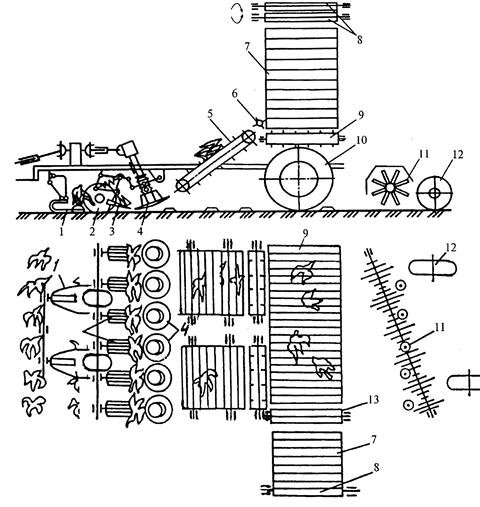
Рис. 11.3. Функціональна схема гичкозбиральної машини БМ-6Б:
1 - копір-водій; 2 - опорне колесо; 3 - копір апарата; 4 - дисковий ніж;5 - приймальний транспортер; 6 і 13 - бітери; 7 – вивантажувальний елеватор; 8 - бітери кидального пристрою; 9 - поперечний транспортер; 10 - ходове колесо; 11 - ротор очисника; 12 - опорне колесо очисника
Очисник головок коренеплодів (див. рис. 11.3) складається з ротора 11, рами, начіпного пристрою, двох опорних пневматичних коліс 12 та механізму привода. Ротор являє собою вал, на якому по гвинтовій лінії закріплені стрічки з прогумованого паса. Ротор установлений під гострим кутом до напрямку руху.
Робочий процес. Під час руху агрегату вздовж рядків копір-водії, рухаючись у міжряддях, копіюють поверхню поля і за допомогою гідросистеми забезпечують спрямування робочих органів машини по рядках. Копіри З гичкозрізувальних апаратів переміщуються по головках коренеплодів і утримують дискові ножі 4 на заданій висоті. Ножі, обертаючись, різальними кромками зрізують верхню частину головок коренеплодів з гичкою і бітерами кидають її на верхні вітки приймальних транспортерів 5. Прутки транспортера переміщують гичку вгору і подають її до двох бітерів 6, які спрямовують її на поперечний транспортер 9. Останній подає гичку на вивантажувальний елеватор 7, де за допомогою бітерів 8 кидального пристрою гичку подають у транспортний засіб, що рухається поруч з агрегатом.
Ротор 11 очисника головок коренеплодів доочищає зрізані головки від землі, залишків гички та інших рослинних решток і зміщує їх на зібрану частину поля.
Машина обладнана універсальною системою автоматичного контролю та сигналізації УСАК-6ВМ. Система складається з блока керування, індикатора з кабелем, шести індукційних датчиків і з'єднувального кабеля.
Датчик являє собою металевий циліндр, в якому розміщено дві обмотки і металевий стержень. В одній обмотці збуджується постійне магнітне поле, а в другій - утворюються електричні сигнали. Датчики встановлюють біля валів, що обертаються. На цих валах закріплені магнітні шунти кулачкового типу. При роботі машини шунти обертаються разом з валами і викликають пульсацію магнітного поля в обмотках датчиків. Якщо рух валів припинився або знизилася частота руху, то передається сигнал на індикатор, і при цьому включається світловий сигнал і одночасно подається звуковий.
Регулювання. Положення дискових ножів відносно поверхні поля регулюють гвинтовим механізмом копіювального колеса кожної секції. Вертикальний зазор між копіром і ножем встановлюють гвинтовою тягою, а горизонтальний - переміщенням копіра по кронштейну підвіски.
Положення ротора очисника головок коренеплодів відносно поверхні поля регулюють гвинтовим механізмом опорних коліс. Ширина захвату машини - 2,7 м. Робоча швидкість - 5-8 км/год. Продуктивність - 0,9-1,5 га/год.
Гичкозбиральна машина БМ-4 призначена для збирання гички цукрових буряків, посіяних з міжряддям 60 см. За конструкцією та робочим процесом вона аналогічна БМ-6Б.
Робоча ширина захвату машини - 2,4 м. Робоча швидкість - 5-8 км/год. Продуктивність - 0,8-1,1 га/год.
Машина гичкозбиральна МБП-6 збирає гичку з шести рядків цукрових буряків, посіяних з міжряддям 45 см.
Вона причіпна і складається з ротора 3 (рис. 11.4), на якому шарнірне закріплені ножі; шнека 4; вивантажувального транспортера 6; очисника головок коренеплодів 8; пасивного дообрізувача головок 10; автоматичного розподільника гички; ходових коліс; рами, причіпного пристрою; гідросистеми та механізмів привода і піднімання гичкозрізувального апарата і очисника головок.
Під час роботи машини ножі ротора 3 зрізують гичку і переміщують її до шнека 4. Спіральні стрічки шнека лівого та правого напрямку зміщують гичку в центральну частину і спрямовують до бітера 5, який подає її на вивантажувальний транспортер 6. Останній переміщує гичку вгору до двох бітерів 11, які подають її в транспортний засіб, що рухається поруч з машиною.
Ротор 8 очисника головок коренеплодів доочищає зрізані головки від землі, залишків гички та інших домішок і зміщує їх убік. Слідом за очисником рухаються три пари пасивних ножів 10, які зрізують верхівки головок коренеплодів.
Робоча швидкість машини - 6,6-8,0 км/год. Продуктивність - 1,0-1,3 га/год.
Машина гичкозбиральна МБК-2,7 призначена для збирання гички кормових коренеплодів і маточних цукрових буряків з міжряддями 45 і 60 см.
Вона напівначіпна. Агрегатують її з тракторами МТЗ-80/82, МТЗ-100/102, Т-70С, а також з ДТ-75М і Т-150.
Машина має будову та робочий процес, аналогічні МБП-6, але на ній відсутній очисник головок коренеплодів з дообрізувачем.
Причіпний пристрій машини розміщений з правого боку, і при роботі агрегату трактор рухається по чистому зібраному полі.
Ширина захвату машини -- 2,4-2,7 м. Робоча швидкість - 2,2-6,0 км/год. Продуктивність для міжрядь 45 і 60 см відповідно 0,6-1,6 і 0,5-1,4 га/год.
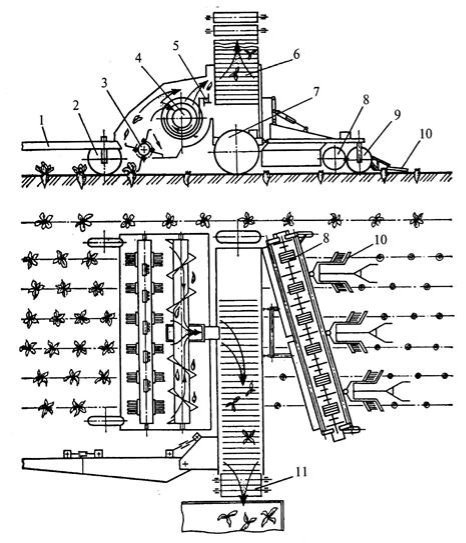
Рис. 11.4. Функціональна схема гичкозбиральної машини МБП-6:
1 - причіпний пристрій; 2 - копіювальне колесо; 3 - ротор з ножами; 4 - шнек-кидальник; 5 - бітер; 6 - вивантажувальний транспортер; 7 - опорне колесо; 8 - очисник головок коренеплодів; 9 - колесо очисника;10 - пасивний дообрізувач головок; 11 – бітери
Гичкозбиральні машини МГ-6 і МГР-6 роторні. Вони забезпечують збирання гички цукрових буряків з міжряддями 45 см. Машина МГ-6 має ротаційно-барабанний різальний апарат, поперечний шнек і боковий трубопровід для подачі зрізаної гички у транспортний засіб, що рухається поруч. При збиранні гички і укладанні її у валки трубопровід знімають. Машина начіпна. Агрегатують її з тракторами класу 1,4 і 2. Ширина захвату -2,7 м. Робоча швидкість - 4-6 км/год. Продуктивність - 1,0-1,6 га/год.
Очисники головок коренеплодів ОГД-6А і ОГД-4А призначені для очищення головок коренеплодів цукрових буряків від залишків гички після проходу гичкозбиральних машин, що налагоджені на підвищене зрізування.
Агрегатують їх з тракторами класів 1,4 і 2. Очисник ОГД-6А складається з двох роторів, механізму привода, рами, замка автозчіпки, двох опорних пневматичних коліс, кожуха і захисних щитків. Очисний ротор має полі-уретанові лопаті, які покращують якість очищення і підвищують надійність, а доочисний - обладнаний полімерними втулками. Ширина захвату очисника - 2,7 м. Робоча швидкість - 6-9 км/год. Продуктивність - до 2,4 га/год. Очисник ОГД-4А забезпечує очищення 4-х рядків цукрових буряків з міжряддями 60 см. Ширина захвату - 2,4 м.
Самохідний навантажувач буряка СПС - 4,2
Самохідний навантажувач буряка СПС - 4,2 призначений для тих же цілей, що і СНТ-2,1 Б, складається з Вантажної частини і встановленого на її рамі трактора МТЗ-80 без переднього моста, задніх коліс та інших вузлів.
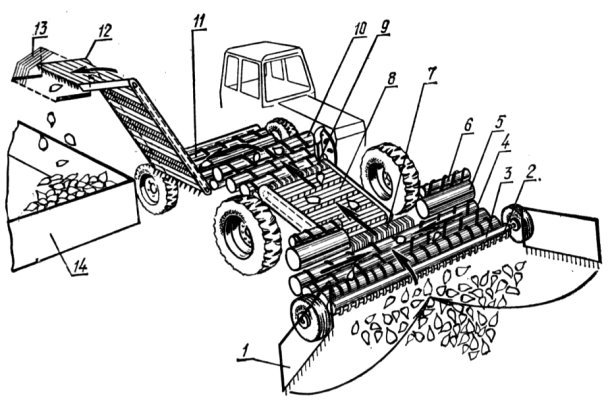
Технологічна схема буряконавантажувача-очищувача СПС-4,2
Навантажувальна частина включає в себе живильник, поздовжній прутковий транспортер 8 поперечний шнековий очищувач 11, навантажувальний транспортер 12, ходову і гідравлічну системи.
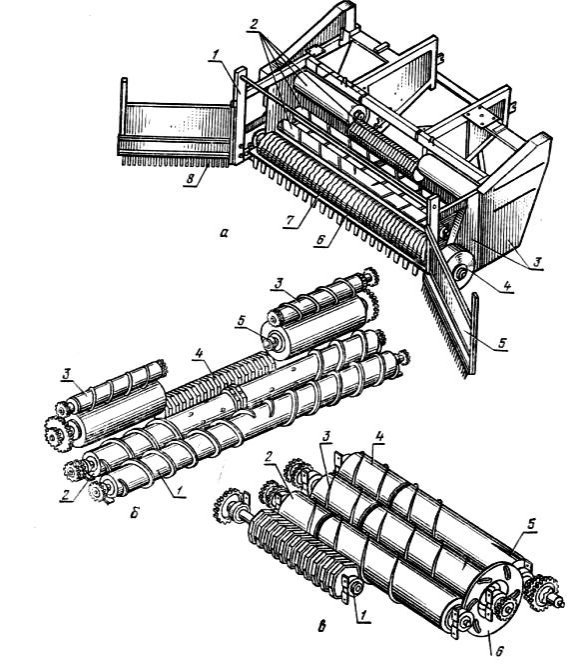
Робочі вузли навантажувача СПС-4,2:а-живильник;б-транспортер-очищувач; в-розосереджувач
Робочі вузли навантажувача СПС-4,2:а-живильник;б-транспортер-очищувач; в-розосереджувач
Живильник забезпечений кулачковим обертовим живильником 6, активним бітером 7, шнековим транспортером-очищувачем 2, опорними котками 4, підгрібаючими щитами 5 і 8. Всі робочі органи змонтовані на рамі 1, Шарнірно закріпленої на передньому ведучому мосту навантажувача. Таке з'єднання в поєднанні з опорними котками 4 дозволяє копіювати поверхню майданчика при навантаженні коренів.
Кулачковий живильник 6 являє собою порожнистий вал з діаметрально закріпленими на його поверхні кулачками.
Активний бітер 7 виконаний у вигляді набору восьмигранних дисків, посаджених на вал зі зміщенням по колу один щодо іншого на 22,5°.
Транспортер-очищувач влаштований з двох шпеків 1 і 2 рівних ширині живильника, з правою і лівою навивками, двох гладких циліндрів 5 і двох коротких шнеків 3, один з яких з лівої, а інший з правою навивками. Циліндри 5 і шнеки 3 утворюють праву і ліву активні стінки. У проміжку між циліндрами і шнеками встановлений гранований бітер 4.
Опорні котки служать для копіювання кулачковим живильником поверхні майданчика.
Поворотними підгрібаючими щитами збільшується до 4,2 м ширина захоплення навантажувача.
Поперечний очисний пристрій складається з розосереджувача і шнекового очищувача.
Розосереджувач включає в себе бітер 1, два шнека 2 і 3 з односторонньою навивкою і Валець 4. В кінці шнека 3 встановлений дисковий ворошитель 6, а Валець 4 виконаний з підкидають лопатями.
Робочий процес навантажувача зводиться до наступного. Гідросистемою живильник опускають опорними котками на грунт і переміщують навантажувач уздовж кагату. При русі входять в кагат кулачки вала живильника піднімають коріння і подають їх на активний бітер 3, які передає їх на шнеки очищувача. Тут правими і лівими навивками шнека потік коренів звужується і направляється на поздовжній транспортер 8. Далі за допомогою розосереджувача 10 коріння рівномірно розподіляються на шнековий очищувач 11. Коріння знімаються з нього скребками навантажувального елеватора і завантажуються в транспортний засіб.
В результаті інтенсивного ворушіння коренів на робочих органах очищувача в процесі навантаження коріння очищаються від налиплого грунту і рослинних залишків.
Продуктивність навантажувача 200 т / год.
 ЛАБОРАТОРНО - ПРАКТИЧНА РОБОТА
ЛАБОРАТОРНО - ПРАКТИЧНА РОБОТА
«Бурякозбиральні машини»
ТЕМА: «Вивчення будови гичкозбиральних машин та корененавантажувачів.
Їх регулювання»
ТРИВАЛІСТЬ ЗАНЯТТЯ: 1 год.
МЕТА: вивчити будову гичкозбиральних машин та корененавантажувачів, технологічний процес роботи, підготовку їх до роботи в заданих умовах, регулювання, технічне обслуговування.
ОБЛАДНАННЯ РОБОЧОГО МІСЦЯ: гичкозбиральна машина БМ-6А та корененавантажувачів СПС-4,2А, набір інструментів, плакати, підручник.
ЗМІСТ ТА ПОСЛІДОВНІСТЬ ВИКОНАННЯ ЗАВДАННЯ:
- Дотримуйтеся правил техніки безпеки.
- Вивчіть призначення гичкозбиральних машин та корененавантажувачів.
- Вивчіть загальну гичкозбиральних машин та корененавантажувачів.
- Вивчіть робочий процес гичкозбиральних машин та корененавантажувачів.
- Вивчіть підготовку гичкозбиральних машин та корененавантажувачів до роботи в заданих умовах, технічне обслуговування та регулювання.
- Виконайте роботу згідно інструкційно-технологічної картки.
- Приберіть робоче місце.
ПИСЬМОВИЙ ЗВІТ
- Які машини використовуються для зрізування гички?
![]()
![]()
![]()
![]()


 2. Користуючись малюнком, перелічіть і запишіть основні складові частини гичкозбиральної машини БМ-6А?
2. Користуючись малюнком, перелічіть і запишіть основні складові частини гичкозбиральної машини БМ-6А?
-

 Користуючись малюнком, перелічіть і запишіть основні складові частини корененавантажувача СПС-4,2А?
Користуючись малюнком, перелічіть і запишіть основні складові частини корененавантажувача СПС-4,2А?
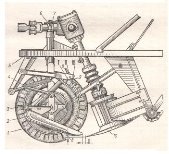

 4. Опишіть будову та регулювання різального апарату?
4. Опишіть будову та регулювання різального апарату?
-
Яке призначення копіра-водій механізму автоматичного водіння?
![]()
![]()
![]()
![]()
![]()
6. Заповніть таблицю
Технічна характеристика
|
Назва машини |
Призначення |
Спосіб агрегатування |
Продуктивність роботи (га/год, т/год) |
З якими тракторами агрегатується |
|
БМ-6А |
|
|
|
|
|
СПС-4,2А |
|
|
|
|
7. Опишіть основні регулювання гичкозбиральної машини БМ-6А
![]()
![]()
![]()
![]()
![]()
![]()
КОНТРОЛЬНІ ПИТАННЯ
1. Як відбувається процес роботи гичкозбиральної машини БМ-6А?
- Яку будову має коренезбиральна машина?
3. Щоб потрібно зробити, якщо на коренях цукрового буряка залишається частина гички ?
- Назвіть регулювання різального апарату.
5. Які типи ножів застосовуються для зрізування роз винуватої гички на гичкозбиральній машини?
ЛІТЕРАТУРА
А.Ф. Головчук Експлуатація та ремонт сільськогосподарської техніки, книга № 3 Машини сільськогосподарські – К.: Грамота, 2005
4. Узагальнення нових знань(4 хв)
Розкрити спектр думок по заданій темі
5. Домашнє завдання (1 хв)
Вивчити даний матеріал .Розширити свої знання по темі використавши матеріали інтернет ресурсів
МАШИНИ ДЛЯ ЗБИРАННЯ ОВОЧІВ.
ПЛАН-КОНСПЕКТ УРОКУ
ТЕРМІН ЧАСУ 2ГОД (1+1)
Тема : Агротехнічні вимоги до машин для збирання овочів.Технологія збирання овочів.Призначення,будова ,принцип роботи ,регулювання і технічні характеристики морквозбиральної, капустозбиральної та цибулезбиральної машини.
Навчальна дисципліна: Сільськогосподарські машини
Урок№__54 Дата проведення __________ Група ________
Мета навчального заняття:
* продовжити вивчення методів і прийомів виконання механізованих робіт у сільському господарстві та шляхів і засобів підвищення родючості ґрунтів.
Навчальна:
* сприяти збагаченню знань учнів про сільськогосподарське виробництво;
* сприяти активізації їх розумової діяльності;
* створювати умови для встановлення зв'язку теорії з практикою, з життєвими явищами і виробничими процесами.
Розвиваюча:
* продовжити розвиток умінь, пов'язаних зі сприйняттям і аналізом джерел;
* сприяти розвитку спостережливості і самостійного осмислювання окремих зв'язків, відносин, ознак між собою;
* продовжити виховання навичок культури мовного спілкування;
Виховна:
* продовжити виховання позитивного ставлення до професії Тракторист;
* сприяти формуванню глибокого пізнавального та емоційного інтересу до сільськогосподарського виробництва;
* сприяти прояву задоволеності своєю діяльністю.
Методи навчання:
• словесний;
• дослідний;.
Форма проведення уроку: комбінована
Форма навчальної діяльності: фронтальна, групова, Індивідуальна.
Засоби навчання:
* роздатковий матеріал;
* слово викладача;
• маркер;
• дошка.
• мультимедійний проектор
• компьютер
Хід уроку:
Організаційна діяльність викладача:
1. Організаційний момент (5 хв)
Підготувати учнів до роботи
2. Цілепокладання, мотивація (5 хв)
Спонукати до активного сприйняття і осмислювання матеріалу, викликати інтерес і активність, створити творчу атмосферу колективної роботи.
Визначити тему, цілі і завдання уроку
3. Вивчення нового матеріалу(30 хв)
КОНСПЕКТ УРОКУ
Агротехнічні вимоги та типи машин
Овочеві культури потрібно збирати у визначені агротехнічні терміни з мі- німальними втратами.
При суцільному збиранні середніх і пізніх сортів капусти треба, щоб ком- байни відокремлювали головки від стрижнів та очищали їх від зеленого лис- тя, а також стандартні головки від нестандартних і завантажували їх у транспортні засоби, що рухаються поряд.
Стандартні головки ранніх сортів капусти повинні мати масу не менше ніж 0,4 кг, а пізніх та середніх сортів — не менш як 0,8 кг й бути свіжими, щільними, суцільними, незабрудненими, із рештками стрижня до 3 см. Втрати стандартних головок допускаються не більше ніж 1 %. Кількість забрудне- них та з механічними пошкодженнями головок має бути не більш як 5 % за масою. Головки капусти, призначенні для зимового зберігання, повинні мати два-три листки, які прилягають нещільно
Машини для збирання коренеплодів налагоджують так, щоб вони підко- пувати 99 % рослин на глибину до 30 см, вибирали з ґрунту 98 % коренепло- дів, обрізали бадилля так, аби його довжина від головки не перевищувала 1..2 см — 85 % коренеплодів. Допускається до 4 % механічних пошкоджень
при збиранні моркви та 5 % при збиранні буряків. Під час збирання машини мають очищати коренеплоди від ґрунту (його може бути не більше ніж 1 % за масою) й очищені коренеплоди вивантажувати у транспортні засоби, що ру- хаються поряд. У разі машинного збирання допускають втрати буряків до
3 %, а моркви — 5 %.
Машинами для збирання цибулі збирають усі сорти цибулі-ріпки та цибу- лі-сіянки на рівній поверхні, на грядках і гребенях. Вони призначені також для підкопування цибулі на глибину 5...12 см, вибирання її з ґрунту й роз- кладання тонким шаром смугою на поверхні ґрунту для просушування, після просушування — збирання цибулин, очищення від ґрунту та інших домішок, транспортування їх у бункер й перевантаження до автомашини. Під час зби- рання цибулі-ріпки допускаються втрати не більше ніж 0,5 %, цибулі-сіян- ки — 1 %, пошкодження цибулин — 5 %.
Машини для збирання томатів мають зрізати рослини на мінімальній ви- соті без пошкодження плодів, створювати мінімальні динамічні навантажен- ня при підрізанні та підбиранні куща, щоб струшування плодів було най- меншим.
Томати, які збирають комбайнами, повинні бути пристосованими до меха- нізованого збирання і мати високі смакові властивості.
Типи машин. Для вибіркового збирання овочів застосовують універсальну платформу ПОУ-2, збирально-сортувальний агрегат АУС-1, начіпну платфо- рму НПСШ-12А, а також пересувні овочезбиральні конвеєри.
Комплекс машин для збирання та післязбиральної обробки цибулі склада- ється з копачів цибулі ЛКГ-1,4 і ЛКП-1,8, ліній доробки цибулі-ріпки ПМЛ-6 і ЛДЛ-10.
Для суцільного збирання капусти використовують начіпний конвеєр ТН-12, капустозбиральні комбайни МСК-1, УКМ-2 і МКП-2. Для післязби- ральної обробки капусти застосовують лінію УДК-30.
Моркву збирають машинами брального типу ММГ-1 і ЕМ-11, самохідним комбайном МУК-1.8, машиною з обрізуванням гички на корені МП-2. Після- збиральну доробку моркви здійснюють на сортувально-очисних лініях ПСК-6 і ЛСК -20.
Інші коренеплоди (столовий буряк, редис, редька, петрушка, пастернак) збирають бурякопідіймачем СМУ-3с, ОПКШ-1,4, а також машиною ЕМ-11.
Для суцільного збирання одночасно достиглих консервних сортів томатів застосовують самохідні комбайни СКТ-2А і ТАКІ-18. Навантажують, транспор- тують та вивантажують контейнери з плодами за допомогою платформи ПТ-3,5. Розвантажують контейнери перекидачем КОН-0,5, начіпним вилчас- тим навантажувачем ПВСВ-0,5 плоди спрямовують у приймальний бункер сортувального пункту томатів СПТ-15.
Одноразове збирання огірків здійснюють машиною КОП-1,5 М.
Організація збирання продукції
Прибирання та зберігання моркви.
Найчастіше моркву прибирається вручну. Пучкова морква забирається з листям і зв'язується в пучки. Морква пізніх термінів дозрівання прибирається напівмеханізованим способом - підкопується за допомогою скоби, а потім збирається вручну. Існує також механізований спосіб збирання, для цього використовують машини, які підкопують коренеплоди і одночасно витягують їх за бадилля. Такі машини добре працюють тільки за наявності здорової прапори. Зберігають коренеплоди моркви в овочесховищах і підвалах насипом, в штабелях, пірамідах, ящиках і поліетиленових мішках, а також у ямах і траншеях. При цьому підтримують температуру в межах 1-2 В° С і відносну вологість 90-95%. Коренеплоди доцільно складати в штабелі або піраміди голівками назовні. Кожен ряд рекомендується пересипати вологим річковим піском (при стисканні в руці з піску не повинна виділятися волога, а якщо розтиснути, він не повинен розсипатися) шаром 1-2 см. Висота штабеля (піраміди) - 80-100 см (15-20 рядків).
Якщо морква зберігають у овочесховище, вона часто зверху мокріє і загниває. Тому овочесховища потрібно систематично провітрювати або коренеплоди вкривати мішковиною, матами. При низькій відносній вологості коренеплоди швидко в'януть. Щоб цьому запобігти, в овочесховище ставлять посудину з водою і час від часу поливають водою проходи для підвищення відносної вологості повітря. Для зберігання моркви в ящиках на дно насипають вологий пісок (2-3 см), на нього укладають коренеплоди в кілька шарів і пересипають їх піском. Добре зберігається морква в поліетиленових мішках масою 20-25 кг. Мішки НЕ зав'язують, щоб у них не концентрувався вуглекислий газ, і не підвищувалася відносна вологість повітря . p> Зберігати моркву можна у вузьких (до 1,5 м) невисоких буртах, але такий спосіб зберігання залежить від погодних умов. Найбільш надійний спосіб зберігання - холодильні камери зі стабільною температурою повітря і відносно високою вологістю. При температурі 0-1 В° С морква зберігається 4-6 місяців, при температурі 2-5 В° С - 2-3 місяці. [8]
Прибирання томатів.
Пора дозрівання та збору врожаю томатів (помідорів) липень-серпень. Плоди з рослин томата (помідори) збирають у міру дозрівання. Дуже важливо не упустити терміни остаточної прибирання. Плоди потрібно знімати з кущів, поки температура повітря вночі вище 7-8 В° тепла. При низькій температурі різко збільшується захворювання плодів, особливо фітофторозом, що викликає їх псування при зберіганні.
Збирання врожаю проводять вручну. Плоди обережно зривають і укладають у кошики, а потім після сортування затарюють в ящики. На прибирання врожаю витрачають більше 30% загального робочого часу, необхідного на культуру томата. Урожай томата збирають вибірково, але не рідше одного разу на 4-5 днів. Розрізняють чотири ступені стиглості плодів томата: зелена - плоди повністю сформувалися, по мають зелене забарвлення; бланжевой - плоди мають білувато-зелену або злегка порозовевшими забарвлення; рожева, або бура, і червона.
У першу чергу прибирають потворні плоди на першій кисті, відразу після їх появи. Вони не будуть повноцінними і затримають налив інших. Плоди збирають різної стиглості залежно від погодних умов і способів вживання.
Для тривалого зберігання відбирають зелені плоди з ледь помітними ознаками бланжевой стиглості. Томати, використовувані відразу в їжу, краще знімати зрілими, тобто червоними, рожевими або жовтими, залежно від сортової забарвлення. Якщо плоди будуть деякий час лежати, їх краще збирати в стадії бланжевой стиглості (жовтувато-буре забарвлення). Така прибирання краща, тому як вона створює сприятливі умови для росту і дозрівання залишилися рослин.
Томати вирощені при надлишковому зрошенні або зібрані після рясних дощів для тривалого зберігання не придатні. На ділянках, де вирощуються томати для тривалого зберігання в холодильниках за 3 тижні до збору врожаю необхідно припинити поливи. Після сильних дощів збір томатів слід відкласти на 5-7 днів.
Для тривалого зберігання збирають томати тільки в суху погоду, коли на плодах повністю висохне роса. Якщо плодоніжка важко відділяється від плоду, то томати збирають з плодоніжкою. Одночасно плоди калібрують по розміром на великі та середні. Плоди близькі за розміром і ступеня зрілості укладають у ящики-лотки в один або два шари. В останньому випадку нижній ряд кладуть плодоніжкою до низу, а верхній плодоніжкою до вгорі. Щоб менше ушкоджувалася шкірка плодів, дно і стінки ящиків вистилаються папером.
Зібрані томати сортують залежно від їх стану та призначення - для використання у свіжому вигляді, дозаріванія, консервування, варіння томатного пюре, приготування соку, засолювання.
Збирають овочеві культури в основному машинами спеціального призначення вибірковим, суцільним і комбінованим способами. Для збирання цибулі застосовують копачі ЛКГ-1,4 і ЛКП-1,8 Капусту, моркву і столові буряки збирають відповідно машинами УКМ-2, УКМ-1, МСК-1, ММТ-1М, ЕМ-11 і Е-825. Для механізації вибіркового збирання овочів і транспортування їх до місць переробки та зберігання використовують плодозбиральні платформи ПОУ-2 і АУС-1 і транспортер широкозахватний ТІНК-25.
Копач цибулі ЛКГ-1,4 призначений для викопування цибулі-ріпки і укладання її у валок та для підбирання просушених валків і навантаження їх у транспортні засоби.
Основними складальними одиницями копача є підкопувальні лемеші, грохоти 2 і 7 (рис. 12.5), грудкоподрібнювач 6, поперечний транспортер З, вивантажувальний елеватор 4, ходові колеса 5, рами, механізм привода та причіпний пристрій.
При переміщенні копача лемеші підрізують скиби ґрунту з цибулею і спрямовують її на перше решето грохота 7. Завдяки коливним рухам решета скиби розпушуються, ґрунт просіюється крізь поздовжні щілини решета і одночасно ворох переміщується вверх на друге решето, де в основному закінчується сепарація ґрунту. Цибуля, грудки та інші домішки сходять з другого решета і потрапляють до балонів грудкоподрібнювача 6, де грудки руйнуються, а вся маса надходить на грохот 2. Тут ґрунт просіюється, а цибуля падає на поверхню поля або потрапляє на транспортер 3 і укладається у валок.
При підбиранні валків робочий процес машини відбувається так, як і при підкопуванні.
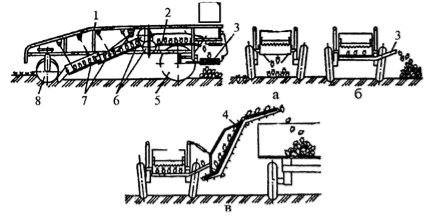
Рис. 12.5. Схема робочого процесу копача цибулі ЛКГ-1,4:
а - з утворенням однорядного валка; б - з утворенням здвоєного валка (за два проходи); в - на підбиранні і завантажуванні цибулі в транспортні засоби; 1 - рама; 2,7 - грохоти; 3 - елеватор; 4 - вивантажувальний елеватор; 5 - ходове колесо; 6 - грудкоподрібнювач; 8 - опорне колесо
Глибину ходу лемешів регулюють гвинтовим механізмом опорного колеса. Частоту коливань грохота встановлюють у межах від 12,7 до 16 с-1.
Ширина захвату копача - 1,4 м. Робоча швидкість - 2,8-5,6 км/год. Продуктивність - до 0,7 га/год.
Машина ЛКП-1,8 причіпна забезпечує одно- і двофазне збирання усіх сортів цибулі. Вона обладнана автоматичним пристроєм глибини ходу-лемеша. Робоча швидкість - до 7 км/год. Продуктивність - до 1 га/год.
Машина для збирання капусти УКМ-2 призначена для суцільного збирання середніх і пізніх сортів качанної капусти.
Вона складається з притискних барабанів 7 (рис. 12.11), різального апарату, вивантажувального елеватора, ходових коліс 8, механізму привода, рами 10, причіпного пристрою 13, гідросистеми і кабіни з органами керування.
Різальний апарат забезпечує зрізування головок капусти та переміщення їх на вивантажувальний елеватор. Складається із двох притискних барабанів 7, клавішів (ліфтерів) 1, хитних рамок 3 і рами 2.
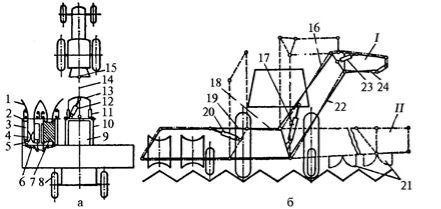
Рис. 12.11. Функціональна схема капустозбиральної машини УКМ-2
(умовно знятий лівий притискний барабан): а - вигляд зверху; б — вигляд ззаду; І, II — відповідно піднята і опущена вивантажувальна частина елеватора;1 - ліфтер; 2 - рама зрізувального апарата; 3 - хитна рама; 4 - ніж; 5 - шатун; 6 - колінчастий вал; 7 - притискний барабан; 8 - ходове колесо;9 -робоче місце механізатора; 10 -рама; 11, 12, 17, 20 і 23 - гідроциліндри;13 - причіпний пристрій; 14 - дишло; 15 - скоба трактора; 16 – похила рамка; 18 - жорстка рама елеватора; 19 - рама приймальної частини елеватора; 21 - відкидні люки; 22 - днище; 24 - кінцева рама елеватора
Притискні барабани утримують головки капусти при зрізуванні та переміщують їх до елеватора. Вони складаються із двох конусних боковий і вала. На боковини натягнуті еластичні стропи.
Клавіші виготовлені із труб круглого перерізу і шарнірне з'єднані з рамою різального апарату. У передній частині клавіші мають опорні лижі, які запобігають заглиблюванню носків ліфтерів у ґрунт.
Ножі різального апарату виготовлені у вигляді сегментів. Під час роботи ножі роблять коливальні рухи. Ножі, ліфтери закріплені на коливальних рамках, які приводяться в рух шатунами 5 від колінчастого вала 6.
Робочий процес. Під час переміщення машини вздовж рядків ліфтери 1 піднімають і спрямовують головки капусти під притискні барабани 7, які вирівнюють і утримують їх.
Ножі 4 роблять коливальні рухи і зрізують головки капусти. Барабанами вони переміщуються до вивантажувального елеватора, який подає їх у транспортний засіб.
Похилу секцію елеватора встановлюють з похилом (положення 1) для навантаження капусти у транспортні засоби.
Якщо головки капусти укладають у валки, то похилу і кінцеву частини елеватора встановлюють горизонтально (положення II).
Робоча швидкість машини - 2,5 км/год. Продуктивність - 0,3 га/год.
Агрегатують із тракторами класу 1,4.
Машина УКМ-1 напівначіпнапризначена для суцільного збирання середніх і пізніх сортів качанної капусти на грядках.
Будова і робочий процес аналогічні, як в УКМ-2.
Машина однорядкова. Агрегатують її з трактором класу 1,4. Привід машини від ВВП трактора. Робоча швидкість - до 2,8 км/год. Продуктивність - до 0,35 га/год.
Машина МСК-1призначена для суцільного збирання одного рядка середніх і пізніх сортів капусти. Машина напівначіпна. Агрегатують її з тракторами класу 1,4.
Машина (рис. 12.12) складається із двох напрямних конусів, напрямних 1 і вирівнювальних 2 шнеків, дводискового різального апарата, стропового 6 і приймального 7 транспортерів, листовідокремлювача 8, перебирального стола, вивантажувального елеватора 10, рами, механізму привода та гідросистеми.
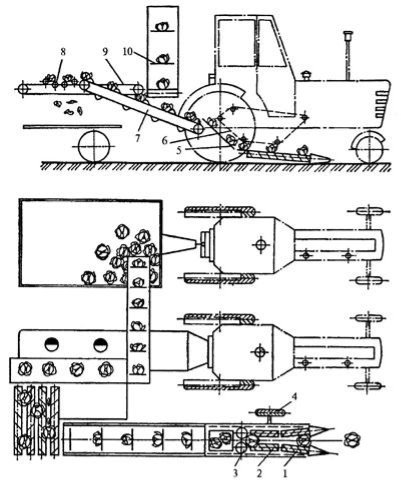
Рис. 12.12. Функціональна схема машини МСК-1:
1 - напрямні шнеки; 2 - вирівнювальні шнеки; 3 — дисковий ніж;4 — копіювальне колесо; 5 - лоток; 6 — стройовий транспортер; 7 - приймальний транспортер; 8 - листовідокремлювач; 9 — перебиральний
транспортер; 10 - вивантажувальний елеватор
Робочий процес. Під час руху агрегату вздовж рядків напрямні конуси, обертаючись разом із шнеками 1, підходять під головку капусти, піднімають її і передають на вирівнювальні шнеки 2. При взаємодії зі стройовим транспортером б шнеки 2 вирівнюють головки, а дискові ножі 3 зрізують їх. Стройовим транспортером зрізані головки переміщуються по лотку 5 до приймального транспортера 7, який подає їх до листовідокремлювача 8. Тут чотири шнеки, що обертаються, захоплюють вільні розеткові листя і відривають їх, а головки спрямовують на перебиральний стіл.
Двоє робітників доочищають головки, і вони транспортером 9 подаються до вивантажувального елеватора 10, який подає їх у транспортний засіб, що рухається поруч з машиною.
Робочі органи машини приводяться в рух від ВВП трактора. Робоча швидкість - 2,8 км/год. Продуктивність - 0,18 га/год.
Машини ММТ-1М і ЕМ-11-1 призначені для збирання одного рядка моркви, столових буряків та інших коренеплодів і навантаження їх у транспортні засоби.
Основними складальними одиницями машини ММТ-1М є стеблопідій-мачі 1 (рис. 12.14), підкопувальний ніж 6, бральний 2 і гичковідокрем-лювальний 3 апарати, поздовжній транспортер 5, вивантажувальний елеватор 4, опорні колеса і механізми привода.
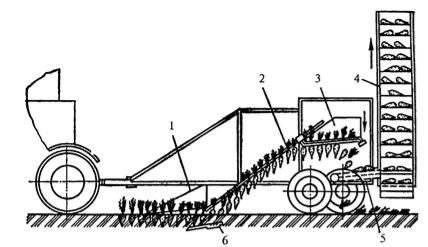
Рис. 12.14. Функціональна схема машини ММТ-1:
1 - спгеблопідіймач; 2 - бральний апарат; 3 - гичковідокремлювальний апарат; 4 - вивантажувальний елеватор; 5 - поздовжній транспортер; 6 — підкопувальний ніж
Під час переміщення машини стеблопідіймачі 1 підіймають і спрямовують гичку (бадилля) до брального апарата 2. Одночасно ніж 6 підкопує коренеплоди. Бральний апарат захоплює коренеплод за гичку і витягує його із ґрунту та переміщує до апарата 3, який відокремлює гичку, і вона падає на поле, а коренеплоди потрапляють на поздовжній транспортер 5. Останній подає їх до вивантажувального транспортера 4, а далі - у транспортний засіб, що рухається поруч з машиною.
Робоча швидкість - 1,4-4,8 км/год. Продуктивність машини - до 0,15 га/год.
Коренезбиральну машину Е-825 використовують для збирання двох рядків моркви, столових буряків та інших коренеплодів.
Вона складається з гичкопідіймача 7 (рис. 12.15, а), підкопувальних лемешів 8, брального апарата 6, гичковідокремлювального апарата 5, поздовжнього транспортера 3, пальчастого стрічкового транспортера 1, поперечного транспортера 4, вивантажувального елеватора 2, опорних коліс, рами, механізмів привода, кабіни з органами керування та причіпного пристрою.
Під час руху машини вздовж рядків гичкопідіймачі 7 піднімають і спрямовують гичку до бральних апаратів б, які являють собою клинозубчасті паси. Внутрішні ланки цих пасів захоплюють коренеплоди за гичку. Одночасно коренеплоди підкопуються лемешами 8. Бральні апарати витягують коренеплоди з ґрунту і переміщують ї'х до гичковідокремлювального апарату 5, де гичка відривається і попадає на транспортер 4, коренеплоди падають на транспортер 3. Останній переміщує коренеплоди на пальчастий транспортер 1, який виділяє залишки гички, грудочки та інші домішки, а коренеплоди попадають на елеватор 2 і завантажуються у транспортний засіб.
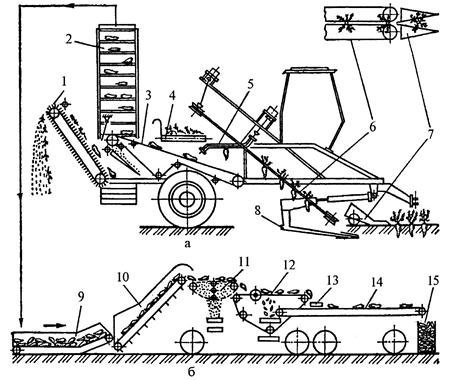
Рис. 12.15. Коренезбиральна машина Е-825 (а) і лінія для післязбиральної обробки моркви ПСК-6 (б):1 — пальчастий транспортер; 2, 4, 10 і 13 - транспортери;З і 11 — сепарувальні елеватори; 5 і 6 — гичковідокремлювальний і бральний апарати; 7 — гичкопідіймач; 8 — леміш; 9 - бункер; 12 - сортувалка;14 - перебиральний стіл; 15 – контейнер
Глибину ходу підкопувальних лемешів установлюють до 25 см.
Агрегатують машину із тракторами МТЗ-100/102, МТЗ-80/82.
Робоча швидкість - до 0,6 км/год, а продуктивність - 0,3-0,5 га/год.
4. Узагальнення нових знань(4 хв)
Розкрити спектр думок по заданій темі
5. Домашнє завдання (1 хв)
Вивчити даний матеріал .Розширити свої знання по темі використавши матеріали інтернет ресурсів
ПЛАН-КОНСПЕКТ УРОКУ
ТЕРМІН ЧАСУ 2ГОД (1+1)
Тема : Підготовка машин до роботи.Збиральні платформи та контейнери. Технологічне налагодження машин.
Навчальна дисципліна: Сільськогосподарські машини
Урок№_55__ Дата проведення __________ Група ________
Мета навчального заняття:
* продовжити вивчення методів і прийомів виконання механізованих робіт у сільському господарстві та шляхів і засобів підвищення родючості ґрунтів.
Навчальна:
* сприяти збагаченню знань учнів про сільськогосподарське виробництво;
* сприяти активізації їх розумової діяльності;
* створювати умови для встановлення зв'язку теорії з практикою, з життєвими явищами і виробничими процесами.
Розвиваюча:
* продовжити розвиток умінь, пов'язаних зі сприйняттям і аналізом джерел;
* сприяти розвитку спостережливості і самостійного осмислювання окремих зв'язків, відносин, ознак між собою;
* продовжити виховання навичок культури мовного спілкування;
Виховна:
* продовжити виховання позитивного ставлення до професії Тракторист;
* сприяти формуванню глибокого пізнавального та емоційного інтересу до сільськогосподарського виробництва;
* сприяти прояву задоволеності своєю діяльністю.
Методи навчання:
• словесний;
• дослідний;.
Форма проведення уроку: комбінована
Форма навчальної діяльності: фронтальна, групова, Індивідуальна.
Засоби навчання:
* роздатковий матеріал;
* слово викладача;
• маркер;
• дошка.
• мультимедійний проектор
• компьютер
Хід уроку:
Організаційна діяльність викладача:
1. Організаційний момент (5 хв)
Підготувати учнів до роботи
2. Цілепокладання, мотивація (5 хв)
Спонукати до активного сприйняття і осмислювання матеріалу, викликати інтерес і активність, створити творчу атмосферу колективної роботи.
Визначити тему, цілі і завдання уроку
3. Вивчення нового матеріалу(30 хв)
КОНСПЕКТ УРОКУ
Найбільш трудомісткими операціями при вирощуванні овочів є збиран- ня, сортування і навантаження їх у транспортні засоби. Особливо великі за- трати праці на збиранні врожаю овочевих культур, які неодночасно дозрі- вають (огірки, томати, перець, баклажани, кабачки, патисони, рання та цвітна капуста тощо). Їх збирають від 3 до 20 разів із періодичністю повто- рення 1...7 днів.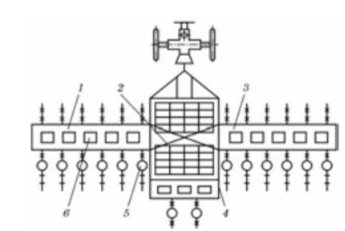
Машини для збирання овочевих культур
На ручне збирання врожаю цих культур з 1 га витрачають до 100...120 люд.-днів, що становить 65...70 % усіх затрат на виробництво. Більша частина часу витрачається на непродуктивні переходи, пов’язані з розставленням та- ри, винесенням зібраних овочів на транспортні дороги і повертанням на міс- це збирання. На всі види перенесення тари і продукції припадає 35...65 % усіх затрат праці. При цьому, чим вищий урожай, тим більше часу витрача- ють на непродуктивні затрати, а частка затрат часу на збирання значно ско- рочується. Це створює у великих спеціалізованих овочівницьких господарст- вах значну напруженість під час збирання, особливо за відсутності робочої сили. В результаті цього урожай збирають несвоєчасно, що призводить до зниження його якості і до втрат.
Для підвищення продуктивності праці на багаторазовому вибірковому збиранні овочів, поліпшення якості продукції, а також зниження її собівар- тості й полегшення праці людей на збиранні застосовують причіпні платфор- ми і широкозахватні овочезбиральні конвеєри.
Овочеву універсальну платформу ПОУ-2 з гідравлічним керуванням випу-
скають у двох виконаннях. У першому її використовують для транспортуван- ня по полю капусти та інших овочів при ручному збиранні їх у кузов платфо- рми і наступним перевантаженням у транспортні засоби для доочищення. До платформи додається три пари стеблопідіймачів для усунення пошкоджень рослин і плодів колесами агрегату. Опускають і піднімають стеблопідіймачі за допомогою гідравлічної системи трактора.
Для збирання огірків, томатів, перцю, кабачків, патисонів, баклажанів (друге виконання) платформу ПОУ-2 (рис. 11.1) обладнують боковими пло- щадками 1 і 3, які підтримуються в горизонтальному положенні розтяжками, а також задньою площадкою 4. Посередині кузова платформи для кріплення розтяжок і піднімання бокових площадок у транспортне положення встанов- люють ферму з лебідкою. Бокові борти прикріплюють до кузова впоперек руху агрегату, а до кожного з них приєднують половину переднього борта.
Причіпна платформа ПОУ-2
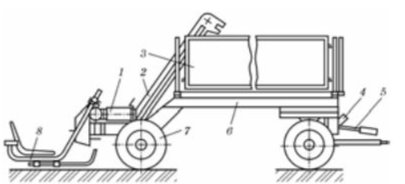
|
Рис. 11.1. Схема овочевої платформи ПОУ-2: |
|
1 — ліва бокова площадка; 2 — ферма з лебідкою і тро- |
|
сами; 3 — права бокова площадка; 4 — задня площадка; |
|
5 — робітники; 6 — тара |
складається із рами з причіпним пристроєм,
|
|
кузова, |
паралелограмного |
|
|
|
|
механізму піднімання, меха- |
|
||
|
|
нізму перекидання з гідро- |
|
||
|
|
циліндром, двох пневматич- |
|
||
|
|
них коліс, стеблопідіймачів і |
|
||
|
|
опорного пристрою. |
відкри- |
|
|
|
|
Задню |
площадку |
|
|
|
|
вають і фіксують у такому |
|
||
|
|
похилому |
положенні, щоб |
|
|
|
|
працівникам було |
зручно |
|
|
|
|
укладати плоди в поставлену |
|
||
|
|
тару. При збиранні огірків |
|
||
|
|
на бокові площадки встанов- |
|
||
|
|
люють по 80 ящиків, на |
|
||
|
|
центральну — 44 і на відки- |
|
||
|
|
дний задній борт — 6 ящи- |
|
||
|
|
ків. Кузов із зібраними пло- |
|
||
|
|
дами піднімається на висоту |
|||
|
|
|
|||
|
|
2,3 м, а потім перекидається |
|
||
|
|
гідроциліндром. |
|
|
|
Залежно від схеми сівби і садіння овочевих культур колеса платформи можна розставляти на колію 1,4; 1,6; 1,8 та 2 м.
Уваріанті з кузовом (збирання капусти, кабачків, патисонів, баклажанів та інших культур) платформу обслуговують вісім працівників (два позаду і по три з бокових площадок). Вони йдуть за платформою, зрізають головки капу- сти або збирають спілі плоди кабачків, баклажанів і обережно кидають їх у кузов. На розвантажувальних або польових дорогах кузов за допомогою гідро- системи піднімають угору і вивантажують зібрані плоди в транспортні засоби.
Уваріанті з боковими площадками платформу обслуговують 8 – 14 пра- цівників, які йдуть за агрегатом, збирають спілі плоди у відра або корзини, а потім пересипають їх у ящики, що розміщуються на платформі.
Машини для збирання капусти
Капустозбиральний комбайн МСК-1 (рис. 11.3) призначений для суцільно-
го збирання середніх і пізніх сортів головчастої капусти, посадженої з шири- ною міжрядь 70 см на рівній і гребеневій поверхнях, з доведенням її до това- рного вигляду, а також для збирання капусти із зеленим листом та наван- таження у транспорт, що рухається поряд. Машина напівначіпна, агрегату- ється з тракторами МТЗ-80/82.
Комбайн МСК-1 складається із зрізувального апарату, приймального кон- веєра 6, листовідокремлювача 7, перебирального стола 8, вивантажувального елеватора 10, механізму приводу від вала відбору потужності трактора та площадки для робітників 9. Рама машини зварної конструкції має причіпний пристрій з балансирним брусом. Вона спирається на два пневматичних ходо- вих колеса з гідравлічним керуванням.
Зрізувальний апарат комплектується двома конусними приймальними шнеками 2, двома вирівнювальними шнеками 3, двома дисковими ножами 4, стро- повим 5 та приймальним прутко- вим 6 конвеєрами. Конвеєр 6 облад- наний гофрованими полотняними скребками. Полотно стропового конвеєра зроблене з двох ролико- вих ланцюгів, з’єднаних між собою гумовими трубками, які утворюють плетену сітку. Нижня гілка стро- пового конвеєра розміщена над .Рис. 11.3. Технологічна схема комбайна МСК-1: 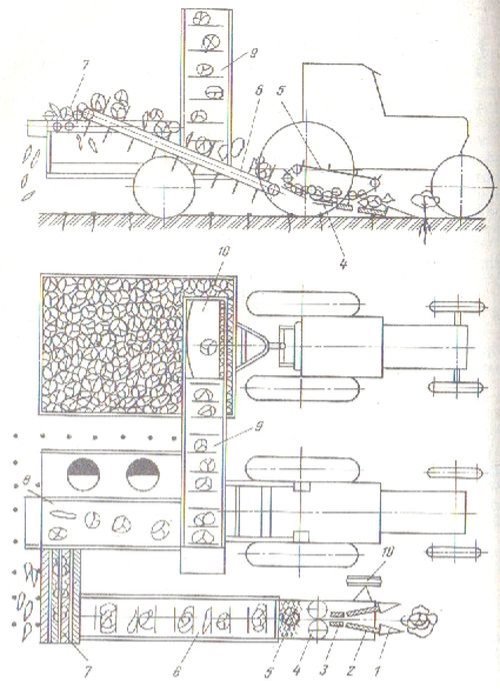
1 — конуси; 2 — приймальний шнек; 3 — вирівнювальний шнек; 4 — дискові ножі; 5 — строповий конвеєр; 6 — приймальний конвеєр; 7 — листовідокремлювач; 8 — пе- ребиральний стіл; 9 — площадка для робіт- ників; 10 — вивантажувальний елеватор; 11 — лотік; 12 — копіювальне колесо
вирівнювальними шнеками, ножами та лотоком. На рамі зрізувального апа- рата на паралелограмній шарнірній підвісці закріплене регульоване по висо- ті копіювальне колесо 12.
Технологічний процес роботи. Під час руху машини обертальні конуси 1 приймальних шнеків підходять під розеткове листя капусти, піднімають лис- тя та полеглі головки і, підтримуючи їх, спрямовують на вирівнювальні шне- ки, які разом зі строповим конвеєром вирівнюють і фіксують головки перед зрізуванням стрижнів. Дискові ножі з насічками на різальній кромці, вигото- влені з листової сталі, зрізують головки та розеткове листя і відокремлюють їх від стрижнів. За допомогою стропового конвеєра головки по лотоку переда- ються на приймальний прутковий конвеєр, що піднімає їх на листовідокрем- лювач. Шнеки листовідокремлювача під час обертання відрізають вільне роз- еткове листя від головок. Потім головки надходять на перебиральний стіл з шириною полотна 600 мм, де їх доочищують уручну і сортують. Пошкоджені та нестандартні головки відбирають та викидають у поле. Після доочищення головки надходять на вивантажувальний прутковий елеватор зі скребками та еластичним лотоком 11, з якого падають у кузов транспортного засобу.
Для зменшення висоти падіння головок капусти до початку завантаження лотік опускають у кузов, а у міру заповнення кузова його піднімають гідро- циліндром. Елеватор закріплений на стояку основної рами машини шарнір- но, що дає змогу повертати його у транспортне положення. Робочі органи ма- шини приводяться в рух від вала відбору потужності трактора. Він складаєть- ся з карданних валів, ланцюгових передач, проміжних валів, запобіжних муфт, конічних та циліндричних редукторів. Гідравлічна система коліс ма- шини з’єднана з гідропідсилювачем рульового керування трактора таким чи- ном, що поворот ведених коліс трактора забезпечує автоматичне синхронне керування колесами машини.
Для забезпечення правильної роботи машини поступальна швидкість агрега- ту має становити 2,8 км/год, а частота обертання вала відбору потужності трак- тора — 535 об/хв. У разі невиконання цих умов стрижні матимуть косий зріз. Важливо, щоб дискові ножі обрізали більшу частину зеленого листя, яке не- щільно прилягає до головки. Цього досягають установленням зазору 50...80 мм між вирівнювальними шнеками. При високому зрізі цю відстань зменшують і піднімають нижню гілку стропового конвеєра, при низькому — розсувають циліндричні редуктори. Нижню гілку стропового конвеєра щодо площини зрізу дискових ножів регулюють за допомогою напрямних зірочок у межах 115...135 мм. Ведений вал приймального конвеєра встановлюють на висоті 400...500 мм над поверхнею ґрунту. Для підтримання рівня води канал пере- городжують двома перемичками: першою — у позиції, на якій здійснюється полив, другою — у наступній позиції. Після закінчення поливу на одній по- зиції першу (за рухом води) напірну перемичку знімають і переносять через позицію.
Перші зразки машин теребильного типу для збирання цукрових буряків в СРСР з'явилися в 1933 р роботи по створенню машин для прибирання столових коренеплодів в нашій країні розпочато в 1950 р.
Вони завершилися створенням однорядної навісний на самохідне шасі Т-16 машини УКШ-1, що складається з підкопує лапи, Шарнірно встановлених пруткових ботвопод'емніков, теребильного механізму, що складається з двох нескінченних втулочно-роликових ланцюгів з накладками з прогумованого ременя, вирівнюючого механізму з дисковим ножем, ботвоотводящего пристрою і завантажувального транспортера.
З 1975 р.в СРСР та інші країни Міжнародного товариства «Агромаш» поставляється з НДР однорядна, Причіпна до трактора тягового класу 14 кН машина ЕМ-11.
Основними робочими органами її є підкопуючий пристрій, пасивні конусоподібні бадилля, клиноремінний механізм і роторно-планчастий механізм для відділення бадилля. Машина обладнана також поздовжнім і поперечним сепаруючими прутковими елеваторами, завантажувальним транспортером, а також робочим місцем машиніста.
Машина виконує наступний технологічний процес. Ряд коренеплодів підкопується лемішем підкопують пристрої; ботвопод'емнікі піднімають лежать на землі листя бадилля, формують бадилля в пучок і подають в гирлі; останні витягують підкопані коренеплоди з грунту за бадилля і транспортують їх до роторно-планчатому механізму для відділення бадилля. Вільна бадилля відводиться щитком на прибране поле, а коренеплоди падають на поздовжній сепаруючий елеватор. Далі після додаткового очищення на поперечному елеваторі коренеплоди вантажним транспортером подаються в поруч йде транспортний засіб.
На збиранні коренеплодів з добре розвиненою і неполегшей бадиллям машина ЕМ - 11 забезпечує досить високу якість прибирання (більш, ніж у 80% коренеплодів обрізка бадилля відбувається відповідно до вимог стандарту, забрудненість купи грунтовими домішками при роботі на легких і середніх грунтах знаходиться в межах агротребувань). Її застосування в комплексі з сортувальним пунктом ПКС - 6 знижує трудовитрати на прибирання в 2,5 рази. У разі закладки прибраної продукції на зберігання в Сховище з активною вентиляцією немає необхідності доведення її до товарної кондиції на сортувальному пункті. При цьому застосування машини ЕМ - 11 скорочує трудовитрати на прибирання в 5,4 рази.
З 1983 р заводом "Лідсельмаш" випускається розроблена в ГСКБ по машинах для овочівництва спільно з Вісхомом Нова Причіпна однорядна машина ММТ - 1 (рис. 1). Машина розроблена з урахуванням можливостей роботи на характерних для центральної зони СРСР важких грунтах підвищеної вологості і при сильно розвиненою бадиллі моркви і оснащена тому більш ефективними робочими органами для відділення грунтових і рослинних домішок, а також пристроями, що запобігають забивання бадиллям. Основні відмінності її від машини ЕМ-11 полягають в наступному: довжина теребильних ременів збільшена з 4800 до 6500 мм, завдяки чому вони поряд з тереблением виконують операцію відведення зрізаної бадилля і передачі її на наступні робочі органи; введені поздовжньо полягають в наступному: довжина теребильних ременів збільшена з 4800 до 6500 мм, завдяки чому вони поряд з тереблением виконують операцію відведення зрізаної бадилля і передачі її на наступні робочі органи; введені поздовжній транспортер бадилля і пальчаста гірка для додаткового очищення коренеплодів від рослинних і грунтових домішок; ММТ - 1 уніфікована з дворядною машиною Е-825 і з перспективними багаторядними машинами; застосована нова конструкція вивантажувального транспортера, що забезпечує безступінчате регулювання висоти навантаження і можливість швидкого переведення з робочого положення в транспортне і назад з робочого місця оператора; підвищена надійність механізму приводу і ін.
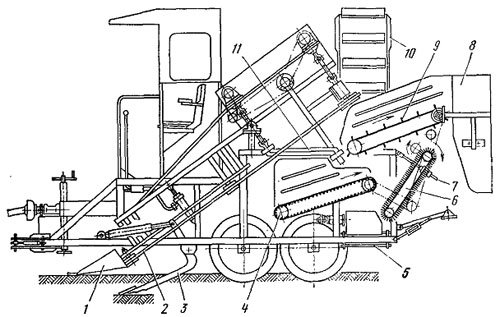 Рис. 1. Схема машини ММТ-1:
Рис. 1. Схема машини ММТ-1:
1-ботвопод'емнік; 2 — теребільний механізм; 3 — підкопують пристрій; 4 і 5 — відповідно поздовжній і поперечний сепаруючі елеватори; 6-пальчаста гірка; 7 — гвинт регулювання кута нахилу пальчастої гірки; 8 — скатний лоток; 9 — транспортер бадилля; 10 — навантажувальний транспортер; 11-бадилля
Технологічний процес роботи машини ММТ - 1 подібний процесу роботи машини ЕМ-11, за винятком додаткового очищення коренеплодів від домішок, а також операції відведення вільної бадилля від бадилля механізму за допомогою спеціального транспортера. Перед початком роботи повинні бути підготовлені загони шириною 6 м для проїзду трактора і транспортного засобу, а також поворотні смуги шириною 13 м.
Якість роботи машини ММТ - 1 залежить від правильності регулювання основних робочих органів: підкопує пристрою, теребильного механізму, бадилля і пальчастої гірки.
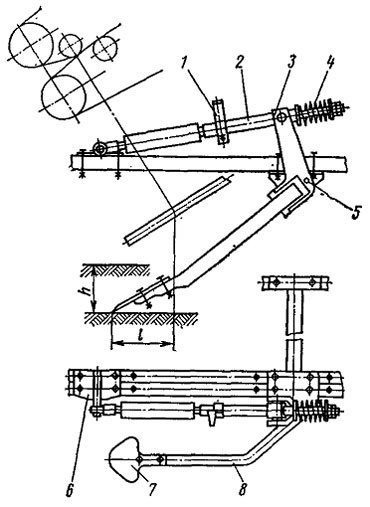 Рис. 2. Підкопуючий пристрій машин ЕМ - 11 і ММТ-1:
Рис. 2. Підкопуючий пристрій машин ЕМ - 11 і ММТ-1:
1-індикатор глибини підкопування; 2-гідроциліндр; 3-кронштейн стійки; 4-пружинний компенсатор; 5-штифтовий запобіжник; 6-кронштейн гідроциліндра; 7-леміш; 8-стійка Лемеші
Підкопуючий пристрій (рис. 2) має два види регулювань: глибини підкопування h і величини поздовжнього зміщення L. Глибина підкопування регулюється в межах 150-250 мм за допомогою гідроциліндра і візуально контролюється за допомогою індикатора. Оптимальним є мінімальне значення глибини, при якому відсутній зріз хвостової частини коренеплоду.
При нормальних умовах роботи оптимальним значенням поздовжнього зміщення підкопує пристрою вважається значення, при якому початку затиснення бадилля теребильними ременями відповідає початок сходу грунтового пласта з поверхні Лемеші. При цьому передня кромка Лемеші зміщена щодо зони затиснення бадилля вперед по ходу машини приблизно на 200 мм. за допомогою змінних отворів на рамі машини передбачена можливість перестановки підкопує пристрої вперед і назад щодо середнього положення на ±100 мм з інтервалом 50 мм. При роботі на важких грунтах з високою вологістю рекомендується зміщувати леміш вперед; на сухих твердих грунтах — назад.
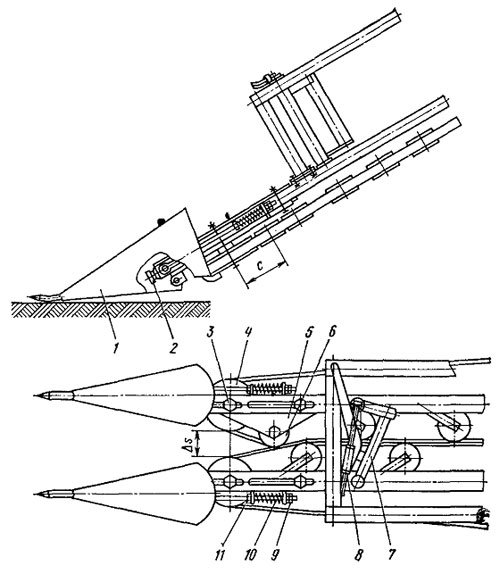
Рис. 3. Теребильна секція машини ММТ-1
У теребільному механізмі (рис. 3) машини ММТ-1 регулюванню підлягають наступні параметри: натяг теребильних ременів; ширина приймальної частини, що характеризується зазором As між веденими шківами або відстанню в між носками ботвопод'емніков; висота розташування шкарпеток ботвопод'емніков.
Натяг теребильних ременів здійснюється переміщенням ведених шківів. Щоб в процесі натягу не погіршувалися умови заходу бадилля в гирлі ременів через зміну взаємного розташування ботвопод'емніка веденого шківа 4 і притискного ролика 6, останні змонтовані на єдиній рухомий рамці 5, переміщуваної за допомогою натяжного гвинта 2. Перед регулюванням натягу необхідно за допомогою стяжного пристрою 7 розвести боковини секції, а також послабити гайки 3. Після натягу стріла прогину в середній частині вільної гілки ременя від зусилля 20-30 Н не повинна перевищувати 30 мм.
Ширину приймальної частини встановлюють в залежності від схеми посіву і стану бадилля. При слаборозвиненою бадиллі на однорядкових посівах слід встановлювати мінімальний зазор між веденими шківами As=0-r-20 мм.При нормальній і сильноразвитой бадиллі, а також на збиранні дворядкових посівів його збільшують до 60-80 мм. відповідно змінюється і відстань в між носками бадиллям від 260-280 до 320-340 мм. Ширину приймальної частини регулюють за допомогою гайок 5 стяжного пристрою. Висоту розташування шкарпеток ботвопод'емніков щодо ведених шківів регулюють за допомогою гайки 9. При слаборозвиненою бадиллі доцільно ведені шківи встановлювати на мінімальній висоті від поверхні грунту, щоб при цьому шкарпетки бадилля не заривалися в грунт, їх необхідно підняти, підтягнувши гайку 9. При роботі на високій бадиллі щоб уникнути захоплювання ременями каменів і грунтових грудок ведені шківи можна встановлювати на більшій висоті; в цьому випадку шкарпетки бадилля підйомників слід опустити, послабивши гайку 9. Після закінчення регулювання висоти гайкою 11 встановлюється необхідна для піджата довжина (100 мм) пружини 10.
Дуже важливими для якісної роботи машини ММТ-1 і найбільш складними є наступні регулювання бичвоотделяющего механізму (рис. 4): установка фазового кута суміжних роторів, Регулювання вертикального зазору між планками суміжних роторів в зоні зачеплення; регулювання величини перекриття планок.
Перші два види регулювань повинні виконуватися на заводі. Однак в процесі експлуатації через появу зазорів і мимовільного ослаблення різьбових з'єднань Заводське регулювання може порушитися; тому слід періодично контролювати її і при необхідності коригувати. Величина перекриття регулюється в залежності від сорту культури, що прибирається, стану поля, вимог до якості обрізки бадилля та інших факторів, тому її проводить механізатор.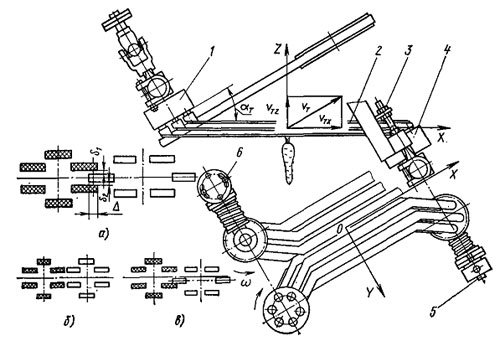
Рис. 4. Роторно-планчатий бадилля механізм:
а-правильно відрегульований механізм; б-неправильно відрегульований фазовий кут; в-неправильно відрегульовані зазори; 1-провідний диск; 2-планка; 3-гайка регулювання зазорів δ1 н δ2 між планками; 4— ведений диск; 5-гвинт регулювання перекриття Δ планок; 6-гайка регулювання фазового кута
Для якісної роботи роторно-планчатого механізму правий і лівий ротори (блоки планок) повинні бути постійно повернені один щодо іншого на 30° (половину фазового кута між планками ротора).
Регулювання фазового кута роторів проводиться зміщенням фланців карданного валу. Для цього необхідно послабити гайки 6 болтів карданного валу і, застопоривши верхній фланець, провернути Нижній у напрямку обертання його в процесі роботи, до потрібного розташування планок (див. 4, а), після чого затягнути гайки. Попередньо необхідно провернути вручну головну карданну передачу машини у напрямку обертання ВВП трактора і застопорити її в цьому положенні. Приклад неправильного регулювання показаний на рис. 4, б.
Вертикальний зазор між планками суміжних роторів в зоні зачеплення регулюється за допомогою гайок 3.
Необхідно, щоб по всій довжині планки був рівномірний зазор як зверху (δ1), так і знизу (δ2), приблизно рівний 1 мм. При цьому в процесі регулювання не повинен порушуватися зазор між нижньою кромкою теребильних ременів і верхніми поверхнями планок в їх заходної частини; оптимальне значення цього зазору 2-5 мм.
Величина перекриття а планок суміжних роторів при заводській збірці встановлюється в межах: в передній частині 2-5 мм, в задній — 5-10 мм.якщо в процесі збирання спостерігається підвищений вміст коренеплодів з пошкодженими головками, необхідно збільшити перекриття в передній частині механізму; при високій обрізку бадилля його слід зменшити. Регулювання проводиться за допомогою гвинтів 5.
Кут нахилу пальчастої гірки (див. 1) регулюється в межах 50-60°. Для зменшення втрат коренеплодів (сходу їх з верхньої частини гірки) кут збільшують; для зниження вмісту домішок у купі коренеплодів — зменшують.
Більш продуктивною, ніж машини ЕМ - 11 і ММТ-1, але поки ще не настільки широко застосовуваної є дворядна машина Е-825 (рис. 5). Машина розроблена фахівцями НДР за участю радянських інженерів і випускається в НДР.
Технологічний процес, що виконується машиною Е-825, подібний до технологічного процесу машини ММТ-1; однак в конструктивному виконанні цих машин є відмінності. Підкопуючий пристрій машини Е-825 виконано з двох симетричних Копачів "плаваючого" типу (рис. 6), що забезпечують більш стабільне тяговий опір і надійний захист від перевантажень; транспортер бадилля встановлений поперек поздовжньої осі машини і розміщений в просторі між теребильними ременями і бадиловиділяючими механізмами; у місці Сходу з сепаруючого елеватора на пальчасту гірку на шляху купи встановлена Шарнірно підвішена Пруткова решітка, яка частково затримує знаходяться в купі рослинні домішки і направляє їх під бадиловідвідний валик.
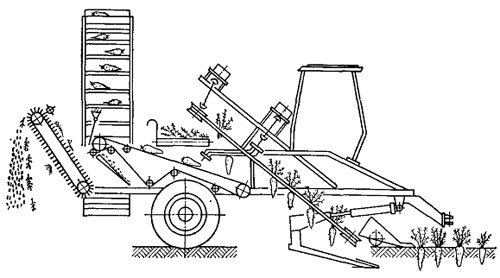
Рис. 5. Схема двухрядной машины Е-825
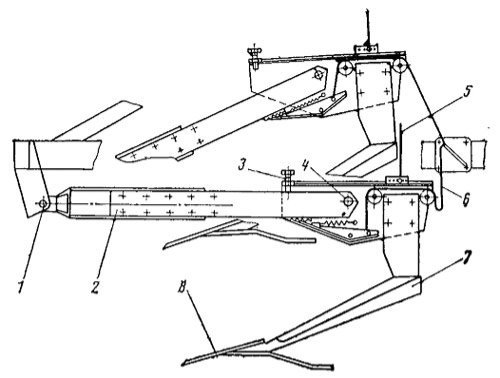
Рис. 6. Плаваючий копач машини Е-825:
1-вісь повороту; 2-лонжерон; 3-болт регулювання кута різання; 4-шарнір, що забезпечує складання Копачів в транспортному положенні за допомогою троса 6; 5-трос механізму підйому; 7-стійка; 8-леміш
На полях, що відповідають вимогам машинного прибирання, машина Е-825 стійко виконує технологічний процес і, маючи рівні з однорядними машинами якісні показники, приблизно вдвічі перевершує їх по продуктивності.
Для перспективної технології обробітку коренеплодів з шириною колії 1,8 т розробляється трьохрядний самохідний комбайн МУК-1,8 (рис. 7). Основні робочі органи його (за винятком ботвопод'емніков, прокосчіка міжрядь і пальчастої гірки зі зворотним кутом нахилу, встановленої в технологічному переході з поперечного пруткового транспортера на навантажувальний) подібні робочим органам машин ММТ-1 і Е-825. Двигун СМД-64, кабіна, гідротрансмісія та інші агрегати Уніфіковані з відповідними агрегатами корнеуборочной машини КС-6Б і картоплезбирального комбайна КСК-4.
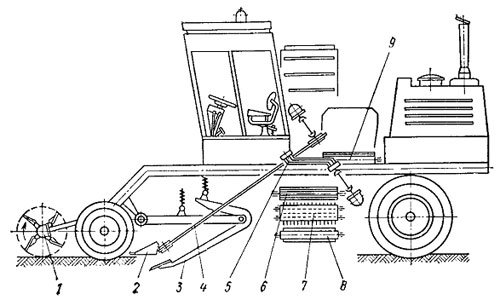
Рис. 7. Схема самохідного комбайна МУК-1,8:
1-прокосчик міжрядь; 2-ботвопод'еміік; 3 - підкопують пристрій-4-теребільний механізм; 5-роторно-планчатий бадилля механізм; 6-сепаруючий прутковий транспортер; 7-пальчаста гірка; 8-навантажувальний транспортер; 9-транспортер для відводу бадилля
У країнах Західної Європи в основному застосовують Однорядні машини обмеженої продуктивності. Робочі органи їх (теребільние ремені, роторно-планчатие бадилля і ін.) аналогічні описаним вище.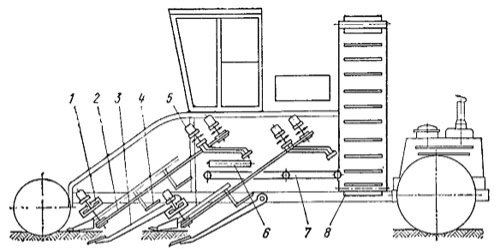
Рис. 8. Схема самохідного трирядного комбайна фірми» Аса ліфт " Asa Lift:
1-Ніж для обрізки верхньої частини бадилля; 2-теребильная секція; 3 - підкопують пристрій; 4-еластичний пруток для очищення коренеплодів від грунту; 5-бадилля механізм; 6-транспортер бадилля; 7-сепаруючі елеватори; 8-завантажувальний транспортер
Із зарубіжних машин для прибирання столових коренеплодів найбільший інтерес представляють Дворядні самохідні комбайни фірми " Мадер енд Плетт "(Великобританія), модель 1123 фірми FMC (США), а також трирядний комбайн фірми «Аса ліфт» (рис. 8). Ці машини призначені для роботи в легких умовах. У них відсутні поздовжній сепаруючий елеватор (за винятком комбайна фірми «Аса ліфт», що має три індивідуальних для кожної секції поздовжніх елеватора), транспортер бадилля і пальчаста гірка. Решта робочі органи приблизно такі ж, як у машини ММТ-1. На комбайні фірми» Мадер енд Плетт " можна додатково встановлювати перед секціями вертикальні дискові ножи, призначені для розрізання сплутаної бадилля в міжряддях.
Комбайни мають приблизно однакові технічні показники. Деякі переваги (швидкість, розміри в транспортному положенні, матеріаломісткість) комбайнів фірм FMC і «Аса ліфт» пояснюються чисто самохідним варіантом їх виконання. Зокрема, у комбайна фірми "Мадер енд Плетт" не витримується прийняте в європейських країнах обмеження транспортної ширини (не більше 3,0 м). Слід зауважити, що комбайн фірми FMC через відсутність збуту не поставлений на серійне виробництво; машина фірми "Мадер енд Плетт «випущена невеликою партією (кілька десятків), комбайн фірми» Аса ліфт" випускається невеликими серіями.
Всі описані вище машини (як вітчизняні, так і зарубіжні) застосовують в основному на збиранні моркви. Однак їх можна також використовувати (з дещо гіршими якісними показниками) на збиранні столового буряка, редьки, цикорію та інших подібних культур, за винятком редису, що відрізняється специфічними схемами посіву з вузькими міжряддями.
Для прибирання редису в деяких країнах намагалися створити спеціальні машини. В СРСР була розроблена Причіпна до трактора чотирирядна редисозбиральна машина РУ — 4; в США - трьох-і шестирядні навісні на трактор машини фірми FMC.
Морковоуборочный комбайн – комбайн для збирання моркви. Технологія обробітку моркви. Овочева сівалка для моркви. Техніка для прибирання моркви DeWulf, Asa Lift, Europa, Av
4. Узагальнення нових знань(4 хв)
Розкрити спектр думок по заданій темі
5. Домашнє завдання (1 хв)
Вивчити даний матеріал .Розширити свої знання по темі використавши матеріали інтернет ресурсів
ТРАКТОРНІ ПРИЧЕПИ
ПЛАН-КОНСПЕКТ УРОКУ
ТЕРМІН ЧАСУ 2ГОД (1+1)
Тема : Вимоги до причепів.Призначення та типи иричепів і напівпричепів , їх будова.Ходова частина ,повротні пристрої .
Навчальна дисципліна: Сільськогосподарські машини
Урок№__56_ Дата проведення __________ Група ________
Мета навчального заняття:
* продовжити вивчення методів і прийомів виконання механізованих робіт у сільському господарстві та шляхів і засобів підвищення родючості ґрунтів.
Навчальна:
* сприяти збагаченню знань учнів про сільськогосподарське виробництво;
* сприяти активізації їх розумової діяльності;
* створювати умови для встановлення зв'язку теорії з практикою, з життєвими явищами і виробничими процесами.
Розвиваюча:
* продовжити розвиток умінь, пов'язаних зі сприйняттям і аналізом джерел;
* сприяти розвитку спостережливості і самостійного осмислювання окремих зв'язків, відносин, ознак між собою;
* продовжити виховання навичок культури мовного спілкування;
Виховна:
* продовжити виховання позитивного ставлення до професії Тракторист;
* сприяти формуванню глибокого пізнавального та емоційного інтересу до сільськогосподарського виробництва;
* сприяти прояву задоволеності своєю діяльністю.
Методи навчання:
• словесний;
• дослідний;.
Форма проведення уроку: комбінована
Форма навчальної діяльності: фронтальна, групова, Індивідуальна.
Засоби навчання:
* роздатковий матеріал;
* слово викладача;
• маркер;
• дошка.
• мультимедійний проектор
• компьютер
Хід уроку:
Організаційна діяльність викладача:
1. Організаційний момент (5 хв)
Підготувати учнів до роботи
2. Цілепокладання, мотивація (5 хв)
Спонукати до активного сприйняття і осмислювання матеріалу, викликати інтерес і активність, створити творчу атмосферу колективної роботи.
Визначити тему, цілі і завдання уроку
3. Вивчення нового матеріалу(30 хв)
КОНСПЕКТ УРОКУ
Причепи і напівпричепи
|
|
|
Тракторний причіпний рухомий склад включає причепи і напівпричепи загального і спеціального призначення.
Причепомназивається несамохідний транспортний засіб, який з’єднується з трактором ,автомобілем ,тягачем тягово – зчіпним пристроєм.
Напівпричіп з’єднується з автомобілем – тягачем сідельно – зчіпним пристроєм ,або зчіпним пристроєм коли частина маси напівпричепа передається на задні колеса трактора.
Засоби причіпного складу поділяють за кількістю осей і можуть бути одновісними, двохвісними і багатовісними.
Причепи, незалежно від кількості осей, передають все навантаження від маси вантажу, який перевозиться, на свої колеса. В напівпричепів вертикальне навантаження передається частково через сідельно – зчіпний пристрій на колеса автомобіля – тягача і значна частина на власні колеса.
|
|
|
|
|
|
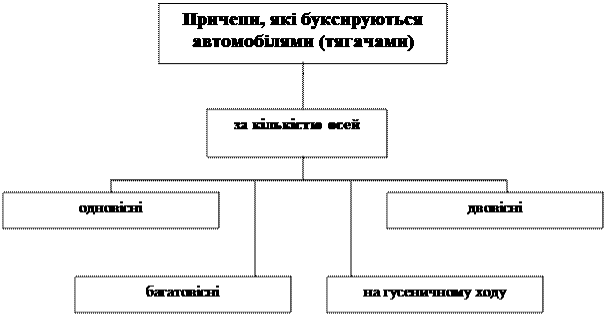
Рис. Класифікація причепів
Для перевезення довгомірних вантажів (труби, ліс тощо) застосовують причепи - розпуски, які представляють собою невелику раму на одній чи двох осях, яка з'єднується з тракторним причепом , автомобілем – тягачем буксирною зчіпкою, яка забезпечує передачу тягових зусиль і утримування розпуску від бокового зміщення. Щоб зробити компактним автопоїзд з причепом - розпуском і зменшити спрацювання шин, при порожніх пробігах причіп перевозиться на причепі ,тягачі. З цією метою шасі тягача обладнують накатними площинами, тяговою лебідкою для навантаження причепа і пристроєм для фіксації навантаженого причепа.
Поворот причепа – розпуску забезпечується встановленими на його рамі поворотним брусом. Такий же брус встановлюють на тягачі. Вантаж спирається своїми кінцями на поворотні бруси, чим забезпечується поворот тягача відносно причепа. Якщо довжина вантажу, який перевозиться, велика, то причіп обладнують пристроєм повороту коліс аналогічному рульовому приводу напрямних коліс автомобіля.
Причеп двохвісний (рис. 20.18.)складається з рами 5 швелерного типу, до якої прикріплена вантажна платформа 3 з бортами.
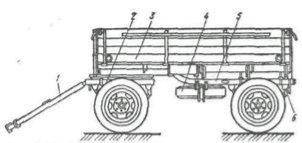
Рис. 20. 18. Двовісний причіп:
1 – дишель; 2 – поворотний візок; 3 – вантажна платформа з бортами; 4 – запасне колесо; 5 – рама швелерного типу; 6 – буксирний пристрій
У передній частині рами зроблено підрамник для кріплення поворотного круга, який складається з двох обойм на кульках і з’єднаний , у свою чергу, з рамою поворотного візка 2. Вона має в передній частині вушка для шарнірного кріплення дишля 1, яким причіп з'єднується з трактором , тягачем. На рамі поворотного візка закріплені підвіски, вісь з колесами і механізм гальмування коліс.
У задній частині рами також виконаний підрамник, з’єднаний жорстко з лонжеронами штампованими вставками. До підрамника прикріплені кронштейн ресор, обмежувач ходу підвіски і задній буфер. Задня поперечина підрамника є опорою для буксирного пристрою 6, сполучних головок пневмоприводу гальм та електричної сигналізації при зєднанні з іншим причепом. У середній частині рами біля правого лонжерона приварений кронштейн для запасного колеса 4.
У двохвісних причепів з низько розташованою рамою замість поворотного візка застосовують привод передніх керованих коліс за аналогією з рульовим приводом коліс автомобіля. Такі причепи мають повну уніфікацію з передньою віссю автомобіля - тягача
Підвіска передньої і задньої осей причепа виконана за допомогою звичайних напівеліптичних ресор. На деяких двовісних причепах
.
Одновісний напівпричіп має вантажну платформу з відкидними боковими і заднім бортами. Рама ступінчастого типу складається з верхньої частини , яка є основою платформи , а до нижньої частини прикріплені ресори із задньою віссю і колесами, дишель з причіпкою .
Задня поперечина рами має кронштейни для кріплення ліхтарів і покажчиків повороту, а до лонжеронів на болтах закріплені буксирні литі гаки. Нижня частина рами також зварена із поперечин і лонжеронів.
Поворотні пристрої причепів
Поворотні пристрої забезпечують зміну руху причепної ланки і запобігання бічного ковзання коліс. Застосовують поворотні осі, до яких жорстко кріпиться дишло, а також поворотні або підкатні візки. Поворотні візки мають нероз'ємне шарнірне з'єднання з рамою причепа, а підкатні - роз'ємне. Візки відрізняються простотою і надійністю та забезпечують зазвичай великі кути повороту візка відносно рами і стійкий прямолінійний рух.
Основний елемент поворотного візка - поворотний круг одного з трьох типів :
– центрально-шворневий з тертям ковзання;
– центрально-шворневий з тертям кочення;
– бесшворневий з тертям кочення.
Центрально-шворневий має верхню і нижню плити, приварені до рами причепа і до рами поворотного візка. Між плитами розміщується диск. Поворотний візок з'єднується з рамою причепа шворенем, вставленним в гніздо поперечки рами причепа і який проходить через опорні плити, диск і поперечку рами поворотного візка. Знизу шворень фіксується гайкою і контргайкою із замковими шайбами. Поверхні, що труться, змащуються.
Найбільш поширений бесшворневий поворотний круг, зображений на рисунку 4.1, що являє собою кульковий або роликовий підшипник великого діаметру (до 1 метра), кільцеві обойми якого сполучені: нижня - з рамою поворотного візка, верхня - з рамою причепа. Між обоймами закладені кульки (ролики), які передають усі зусилля від візка на раму. Точність виготовлення кульок 2,5-5 мкм.
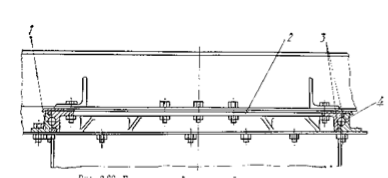
Рисунок 4.1 - Бесшворневий кульковий поворотний круг: 1, 2 - відповідно нижня і верхня кільцеві обойми; 3 - кільця ущільнювачів; 4 – кульки.
Для забезпечення можливості транспортування напівпричепа автомобілем (причепом) обладнаним тягово-зчіпним пристроєм, використовують підкатні візки. Вони являються одновісним причепом зі встановленим на нім сідельно-зчіпним пристроєм.
Поворотним пристроєм причепа з підкатним візком є встановлений на візку жорсткий сідельно-зчіпний пристрій. На відміну від встановлюваних на тягачах, такий пристрій має тільки один ступінь свободи, що забезпечує поворот візка відносно напівпричепа в горизонтальній площині.
Значно збільшує маневреність причепів використання пристроїв, що забезпечують поворот тільки коліс (трапеції).
Поворотні пристрої з керованими колесами можуть бути з бічним розташуванням важелів приводу - нерозрізною рульовою трапецією (рис. 4.2) і центральним розміщенням приводу - розрізною рульовою трапецією (рис. 4.3).
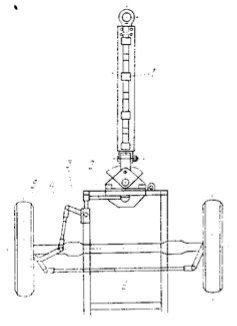
Рисунок 4.2 - Привід управління причепом з нерозрізною рульовою трапецією.
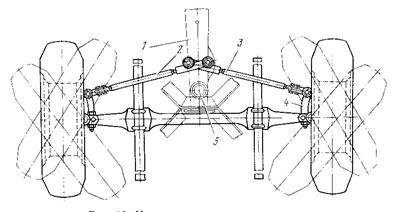
Рисунок 4.3 - Настановні положення коліс.
Як видно з рисунку 4.1, при повороті дишла 1 вліво, тяга 2 повертає маятниковий важіль 3, а від нього тягою 4 зусилля передається важелю 5 і рульовій трапеції 6. Недоліком цього пристрою є деяка невідповідність кінематики підвіски і приводу. Це викликає прискорене зношування сполучень приводу.
Так, у причепа МАЗ-5207В (рис. 4.3) поворотна цапфа встановлена за допомогою шворня. Важелі коліс 4 шарнірно (кульовими пальцями) сполучені тягою 2 і 3 з кронштейном 1 дишла 5, утворюючи розрізну рульову трапецію, тобто з не суцільною поперечною тягою. Поворот дишла, через тягу і важелі, викликає поворот керованих коліс.
З метою підвищення маневреності конструктори розробили наступну конструкцію системи управління поворотом причіпної ланки транспортного засобу:
- блок управління на основі інформації датчиків: кута повороту керованих коліс тягача, кута заломлення автопоїзда і швидкості транспортного засобу, а також датчика зворотнього зв'язку по положенню керованої осі за допомогою гідроприводу регулює кутову швидкість повороту керованої осі причіпної ланки залежно від швидкості транспортного засобу.
При збільшенні числа осей і габаритної довжини автопоїздів, що є необхідним при підвищенні вантажопідйомності, погіршується маневреність автопоїздів. Це виражається в збільшенні ширини коридору, займаної автопоїз-дом при повороті. Крім цього, збільшення поперечних реакцій дороги, діючих на колеса під час повороту, викликає прискорений знос автошин.
На сьогоднішній день, з метою підвищення маневреності, широко використовують самовстановлюючі осі і осі з самовстановлюючими колесами.
На рисунку 4.4 зображений візок із задньою самовстановлюючою віссю. Задня вісь 1 може переміщатися в направляючих 5 ресорно-балансувальної підвіски. Центр 2 повороту зміщений вперед відносно осі 1 на величину зміщення а. Стабілізація прямолінійного руху осі забезпечується поперечною ресорою 3, пружинами 4, а також за рахунок зміщення а.
|
|
Бокові складові реакції дороги, діючі на колеса, повертають (із-за зміщення а) вісь так, що усувається бічне прослизгування шин. Оскільки поворотні осі збільшують вантажну висоту і висоту розміщення центру тяжіння, то частіше застосовують самовстановлюючі колеса. Тут вперед від осі винесений шворень. Колеса сполучені поперечною тягою, на якій встановлений механізм блокування коліс для руху в прямому напрямку при русі заднім ходом або із швидкістю більше 30 км / год. Привід механізму - електропневматичний. |
|
Рисунок 4.4 - Візок двовісного напівпричепа з самовстановлюючою задньою віссю. |
|
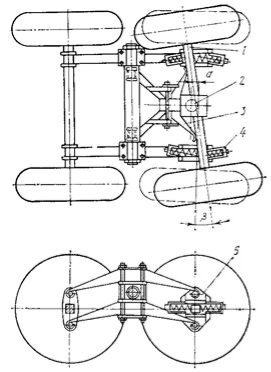
4. Узагальнення нових знань(4 хв)
Розкрити спектр думок по заданій темі
5. Домашнє завдання (1 хв)
Вивчити даний матеріал .Розширити свої знання по темі використавши матеріали інтернет ресурсів
ПЛАН-КОНСПЕКТ УРОКУ
ТЕРМІН ЧАСУ 2ГОД (1+1)
Тема : Вплив конструкції пневмоколіс на безпеку праці. Гальмівні системи.Підготовка причепів до перевезення вантажів.
Навчальна дисципліна: Сільськогосподарські машини
Урок№_57__ Дата проведення __________ Група ________
Мета навчального заняття:
* продовжити вивчення методів і прийомів виконання механізованих робіт у сільському господарстві та шляхів і засобів підвищення родючості ґрунтів.
Навчальна:
* сприяти збагаченню знань учнів про сільськогосподарське виробництво;
* сприяти активізації їх розумової діяльності;
* створювати умови для встановлення зв'язку теорії з практикою, з життєвими явищами і виробничими процесами.
Розвиваюча:
* продовжити розвиток умінь, пов'язаних зі сприйняттям і аналізом джерел;
* сприяти розвитку спостережливості і самостійного осмислювання окремих зв'язків, відносин, ознак між собою;
* продовжити виховання навичок культури мовного спілкування;
Виховна:
* продовжити виховання позитивного ставлення до професії Тракторист;
* сприяти формуванню глибокого пізнавального та емоційного інтересу до сільськогосподарського виробництва;
* сприяти прояву задоволеності своєю діяльністю.
Методи навчання:
• словесний;
• дослідний;.
Форма проведення уроку: комбінована
Форма навчальної діяльності: фронтальна, групова, Індивідуальна.
Засоби навчання:
* роздатковий матеріал;
* слово викладача;
• маркер;
• дошка.
• мультимедійний проектор
• компьютер
Хід уроку:
Організаційна діяльність викладача:
1. Організаційний момент (5 хв)
Підготувати учнів до роботи
2. Цілепокладання, мотивація (5 хв)
Спонукати до активного сприйняття і осмислювання матеріалу, викликати інтерес і активність, створити творчу атмосферу колективної роботи.
Визначити тему, цілі і завдання уроку
3. Вивчення нового матеріалу(30 хв)
КОНСПЕКТ УРОКУ
ГАЛЬМІВНІ СИСТЕМИ АВТОПОЇЗДІВ
Гальмівні системи автотранспортних засобів призначені для зниження швидкості руху аж до повної зупинки і утримання АТЗ на стоянці.
У зв'язку із зростанням рівня вимог до безпеки руху при збільшенні швидкості пересування і маси АТЗ посилюються і нормативи до технічної досконалості і стану гальмівних систем.
Вимоги до технічного стану АТЗ, що знаходяться в експлуатації, за умовами безпеки руху регламентуються стандартами. ГОСТ 25478-91 визначає, зокрема, вимоги до гальмівного управління.
Враховуючи міжнародний характер вимог по безпеці конструкції АТЗ, низка європейських країн прийняла в 1958 р. в Женеві у рамках КВТ ЕЭК ООН "Угоду про прийняття єдиних однакових умов офіційного твердження і взаємномного визнання офіційного твердження предметів, обладнання і частин механічних транспортних засобів". У рамках цієї Угоди країни-учасниці розробили єдині приписи (Правила ЕЭК ООН), що містять вимоги до АТЗ і методів їх випробувань. Угоду підписали більше 20-ти європейських країн. СРСР приєднався до Угоди в 1987 р. Технічні вимоги, що пред'являються до вантажних АТЗ, до складових частин їх конструкцій і предметів додаткового обладнання в Україні визначаються Правилом 13-08 ЕЭК ООН. Цими вимогами керуються при проведенні обов'язкової сертифікації.
Основні вимоги Правила № 13-08 відображені в таблиці 5.1.
На сучасних автомобілях застосовують декілька типів гальмівних приводів.
На легкових автомобілях і вантажних невеликої вантажопідйомності застосовують гідравлічні приводи. На великовантажних автомобілях привід гальм пневматичний. У автомобілів сімейства Урал - пневмо-гідравлічний.
У гальмівних системах автопоїздів застосовують в основному пневматичні гальмівні приводи. З'єднання гальмівних магістралей тягача і причепа просте і екологічно безпечне.
Гідравлічні приводи, із-за складності зчленування гальмівних магістралей, застосовують украй рідко.
На автопоїздах малої маси іноді застосовують інерційні гальмівні приводи. Принцип дії - при накаті причепа на гальмуючий тягач спеціальний пристрій включає гальма причепа. Інтенсивність набігання і гальмування прямопропорційні. Така система проста, але їй властиві недоліки. Гальмування причепа запізнюється і разом з цим набігання його на тягач збільшує гальмівний шлях і погіршує маневреність автопоїзда. Крім того, причіп може загальмовуватися і при русі по нерівностях дороги.
Найбільш перспективні електропневматичні гальмівні приводи. У них вища швидкодія і легша оптимізація законів наростання гальмівних моментів на мостах автопоїзда.
Таблиця 5.1 - ВИМОГИ ДО ГАЛЬМІВНИХ СИСТЕМ (основні показники)
|
Найменування показників |
Вантажні автомобілі з повною масою, Т (категорія) |
||
|
≤ 3,5 (№ 1) |
> 3,5 ≤ 12 (№ 2) |
> 12 (№ 3) |
|
|
Робоча гальмівна система |
|
|
|
|
Випробування типу О (двигун від'єднаний) – початкова швидкість випробування, км / год. – гальмівний шлях, ≤ м – середнє сповільнення, яке встановилось, ≥ м / с² – сила на органі управління, ≤ Н |
61,2 5,0 |
36,7 5,0 |
36,7 5,0 |
|
Запасна гальмівна система |
|
|
|
|
(Виконується подібно випробуванню типу О, двигун від'єднаний) – початкова швидкість випробування, км / год. – гальмівний шлях, ≤ м – середнє сповільнення, яке встановилось ≥ м / с² – сила на органі управління : Ручне, ≤ Н Педальне, ≤ Н |
95,7 2,2 |
54,0 2,2 |
38,3 2,2 |
|
Гальмівна система (випробування з навантаженням) стоянки |
|
|
|
|
– утримання в непод-виж-ном положенні (на спуску або підйомі), ≥ % – разом з незатормо-женным причепом, ≥ % – сила на органі управління : Ручне, ≤ Н Педальне, ≤ Н |
|
|
|
Правила дорожнього руху 2020
22. Перевезення вантажу
Маса вантажу, що перевозиться, і розподіл навантаження на осі не повинні перевищувати величин, визначених технічною характеристикою даного транспортного засобу.
Водій перед початком руху зобов'язаний перевірити надійність розташування і кріплення вантажу, а під час руху — контролювати це, щоб запобігти його падінню, волочінню, травмуванню супроводжуючих осіб чи створенню перешкод для руху.
Перевезення вантажу дозволяється за умови, що він:
|
a) |
не наражає на небезпеку учасників дорожнього руху; |
|
б) |
не порушує стійкості транспортного засобу і не утруднює керування ним; |
|
в) |
не обмежує водієві оглядовості; |
|
г) |
не закриває зовнішніх світлових приладів, світлоповертачів, номерних і розпізнавальних знаків, а також не перешкоджає сприйманню сигналів, що подаються рукою; |
|
ґ) |
не створює шуму, не піднімає пилу та не забруднює проїзну частину і навколишнє середовище. |
Вантаж, що виступає за габарити транспортного засобу спереду або ззаду більш як на 1 м, а за шириною перевищує 0,4 м від зовнішнього краю переднього або заднього габаритного ліхтаря, повинен бути позначений відповідно до вимог підпункту «з» пункту 30.3 цих Правил.
Коментар
За спеціальними правилами здійснюється дорожнє перевезення небезпечних вантажів, рух транспортних засобів та їх составів у разі, коли хоч один з їх габаритів перевищує за шириною 2,6 м (для сільськогосподарської техніки, яка рухається за межами населених пунктів, дорогами сіл, селищ, міст районного значення, — 3,75 м), за висотою від поверхні дороги — 4 м (для контейнеровозів на встановлених Укравтодором і Національною поліцією маршрутах — 4,35 м), за довжиною — 22 м (для маршрутних транспортних засобів — 25 м), фактичну масу понад 40 т (для контейнеровозів — понад 44 т, на встановлених Укравтодором і Національною поліцією для них маршрутах — до 46 т), навантаження на одиночну вісь — 11 т (для автобусів, тролейбусів — 11,5 т), здвоєні осі — 16 т, строєні — 22 т (для контейнеровозів навантаження на одиночну вісь — 11 т, здвоєні осі — 18 т, строєні — 24 т) або якщо вантаж виступає за задній габарит транспортного засобу більш як на 2 м.
Осі слід вважати здвоєними або строєними, якщо відстань між ними (суміжними) не перевищує 2,5 м.
Рух транспортних засобів та їх составів з навантаженням на одиночну вісь понад 11 т, здвоєні осі — понад 16 т, строєні осі — понад 22 т або фактичною масою понад 40 т (для контейнеровозів — навантаження на одиночну вісь — понад 11 т, здвоєні осі — понад 18 т, строєні осі — понад 24 т або фактичною масою понад 44 т, а на встановлених Укравтодором і Національною поліцією для них маршрутах — понад 46 т) у разі перевезення подільних вантажів автомобільними дорогами забороняється.
Забороняється рух транспортних засобів з навантаженням на вісь понад 7 т або фактичною масою понад 24 т автомобільними дорогами загального користування місцевого значення.
Транспортні засоби, що здійснюють дорожнє перевезення небезпечних вантажів, повинні рухатися з увімкненим ближнім світлом фар, задніми габаритними ліхтарями та встановленими розпізнавальними знаками, передбаченими пунктом 30.3 цих Правил, а великовагові та великогабаритні транспортні засоби, сільськогосподарська техніка, ширина якої перевищує 2,6 м — також з увімкненим проблисковим маячком (проблисковими маячками) оранжевого кольору.
Сільськогосподарська техніка, ширина якої перевищує 2,6 м, повинна обладнуватися знаком ![]() “Розпізнавальний знак транспортного засобу”.
“Розпізнавальний знак транспортного засобу”.
Сільськогосподарська техніка, ширина якої перевищує 2,6 м, повинна рухатися в супроводі автомобіля прикриття, який рухається позаду та займає крайнє ліве положення відносно габаритів сільськогосподарської техніки і який обладнується з додержанням вимог стандартів проблисковим маячком оранжевого кольору, ввімкнення якого не дає переваги в русі, а є тільки допоміжним засобом інформації для інших учасників руху. Під час руху такій техніці заборонено хоча б частково займати смугу зустрічного руху. На супровідному автомобілі також встановлюється дорожній знак ![]() “Об’їзд перешкоди з лівого боку”, який повинен відповідати вимогам стандартів.
“Об’їзд перешкоди з лівого боку”, який повинен відповідати вимогам стандартів.
Обов’язковим також є встановлення габаритних вогнів по ширині габаритів сільськогосподарської техніки зліва та справа.
Забороняється рух сільськогосподарської техніки, ширина якої перевищує 2,6 м, колоною та в умовах недостатньої видимості.
4. Узагальнення нових знань(4 хв)
Розкрити спектр думок по заданій темі
5. Домашнє завдання (1 хв)
Вивчити даний матеріал .Розширити свої знання по темі використавши матеріали інтернет ресурсів
ПЛАН-КОНСПЕКТ УРОКУ
ТЕРМІН ЧАСУ 1 ГОД.
Тема :Безпека праці,під час перевезення вантажів.Міжгосподарські перевезення.Документація. Вимоги безпеки під час експлуатації.
Навчальна дисципліна: Сільськогосподарські машини
Урок№__58__ Дата проведення __________ Група ________
Мета навчального заняття:
* продовжити вивчення методів і прийомів виконання механізованих робіт у сільському господарстві та шляхів і засобів підвищення родючості ґрунтів.
Навчальна:
* сприяти збагаченню знань учнів про сільськогосподарське виробництво;
* сприяти активізації їх розумової діяльності;
* створювати умови для встановлення зв'язку теорії з практикою, з життєвими явищами і виробничими процесами.
Розвиваюча:
* продовжити розвиток умінь, пов'язаних зі сприйняттям і аналізом джерел;
* сприяти розвитку спостережливості і самостійного осмислювання окремих зв'язків, відносин, ознак між собою;
* продовжити виховання навичок культури мовного спілкування;
Виховна:
* продовжити виховання позитивного ставлення до професії Тракторист;
* сприяти формуванню глибокого пізнавального та емоційного інтересу до сільськогосподарського виробництва;
* сприяти прояву задоволеності своєю діяльністю.
Методи навчання:
• словесний;
• дослідний;.
Форма проведення уроку: комбінована
Форма навчальної діяльності: фронтальна, групова, Індивідуальна.
Засоби навчання:
* роздатковий матеріал;
* слово викладача;
• маркер;
• дошка.
• мультимедійний проектор
• компьютер
Хід уроку:
Організаційна діяльність викладача:
1. Організаційний момент (5 хв)
Підготувати учнів до роботи
2. Цілепокладання, мотивація (5 хв)
Спонукати до активного сприйняття і осмислювання матеріалу, викликати інтерес і активність, створити творчу атмосферу колективної роботи.
Визначити тему, цілі і завдання уроку
3. Вивчення нового матеріалу(30 хв)
КОНСПЕКТ УРОКУ
ДЕРЖАВНИЙ СТАНДАРТ УКРАЇНИ
Засоби транспортні дорожні
ПРИЧЕПИ ТА НАПІВПРИЧЕПИ СПЕЦІАЛІЗОВАНІ
Загальні технічні умови ДСТУ 3850-
Видання офіційнеКиїв
ПРИЧЕПИ ТА НАПІВПРИЧЕПИ СПЕЦІАЛІЗОВАНІ
СРЕДСТВА ТРАНСПОРТНЫЕ ДОРОЖНЫЕ
ПРИЦЕПЫ И ПОЛУПРИЦЕПЫ СПЕЦИАЛИЗИРОВАННЫЕ
Общие технические условия ROAD VEHICLES
SPECIALIZED TRAILERS AND SEMI-TRAILERS
Чинний від 2000—01—01
-
ГАЛУЗЬ ВИКОРИСТАННЯ
- Цей стандарт поширюється на причепи та напівпричепи спеціалізовані, які за своєю конструкцією та обладнанням призначені для перевезення людей або вантажів певних категорій.
Цей стандарт не поширюється на причепи до легкових автомобілів, причепи (напівпричепи) до вантажних автомобілів загальногосподарчого призначення та спеціальні причепи (напівпричепи).
- Вимоги цього стандарту є обов’язковими, крім 4.1.8.4 та додатка А.
У цьому стандарті є посилання на такі стандарти:
ДСТУ 2862—94 Надійність техніки. Методи розрахунку показників надійності. Загальні вимоги
ДСТУ 3525—97 Засоби транспортні дорожні. Маркування
ГОСТ 2.601—95 ЕСКД. Эксплуатационные документы
ГОСТ 4.400—85 СПКП. Прицепы и полуприцепы автомобильные. Номенклатура показателей
ГОСТ 9.014—78 ЕСЗКС. Временная противокоррозионная защита изделий. Общие требования
ГОСТ 9.104—79 ЕСЗКС. Покрытия лакокрасочные. Группы условий эксплуатации
ГОСТ 12.1.004—91 ССБТ. Пожарная безопасность. Общие требования
ГОСТ 12.1.010—76 ССБТ. Взрывобезопасность. Общие требования
ГОСТ 12.1.019—79 ССБТ. Электробезопасность. Общие требования и номенклатура видов защиты
Видання офіційне
ГОСТ 12.2.003—91 ССБТ. Оборудование производственное. Общие требования безопасности
ГОСТ 12.2.007.14—75 ССБТ. Кабели и кабельная арматура. Требования безопасности. ГОСТ 12.4.026—76 ССБТ. Цвета сигнальные и знаки безопасности ГОСТ 2349—75 Устройства тягово-сцепные системы «крюк-петля» автомобильных и тракторных поездов. Основные параметры и размеры. Технические требования
ГОСТ 3163—76 Прицепы и полуприцепы автомобильные. Общие технические требования
ГОСТ 3242—79 Соединения сварные. Методы контроля качества ГОСТ 3940—84 Электрооборудование автотракторное. Общие технические условия. ГОСТ 4364—81 Приводы пневматические тормозных систем автотранспортных средств. Общие технические требования
ГОСТ 5513—86 Шины пневматические для грузовых автомобилей, автоприцепов, автобусов и троллейбусов. Технические условия
ГОСТ 6964—72 Фонари внешние сигнальные и осветительные механических транспортных средств, прицепов и полуприцепов. Общие технические условия
гост 7593—80 Покрытия лакокрасочные грузовых автомобилей. Технические требования
ГОСТ 8769—75 Приборы внешние световые автомобилей, автобусов, троллейбусов, тракторов, прицепов и полуприцепов. Количество, расположение, цвет, углы видимости
гост 9008—94 Детали деревянные платформ грузовых автомобилей, прицепов и полуприцепов. Общие технические условия
ГОСТ 9218—86 Цистерны для пищевых жидкостей, устанавливаемые на автотранспортные средства. Общие технические условия
ГОСТ 12105—74 Тягачи седельные и полуприцепы. Присоединительные размеры ГОСТ 14658—86 Насосы объемные гидроприводов. Правила приемки и методы испытаний
ГОСТ 15150—69 Машины, приборы и другие технические изделия. Исполнения для различных климатических районов. Категории, условия эксплуатации, хранения и транспортирования в части воздействия климатических факторов внешней среды
ГОСТ 17108—86 Гидропривод объемный и смазочные системы. Методы измерения параметров
ГОСТ 18764—80 Пружины к колодочным прижимам. Конструкция и размеры ГОСТ 19173—80 Полуприцеп-контейнеровоз грузоподъемностью 20,320 т. Параметры и размеры. Общие технические требования
ГОСТ 19433—88 Грузы опасные. Классификация и маркировка ГОСТ 20245—74 Гидроаппаратура. Правила приемки и методы испытаний ГОСТ 21561—76 Автоцистерны для транспортирования сжиженных углеводородных газов на давление до 1,8 МПа. Общие технические условия
ГОСТ 21624—81 Система технического обслуживания и ремонта автомобильной техники. Требования к эксплуатационной технологичности и ремонтопригодности изделий
ГОСТ 22576—90 Автотранспортные средства. Скоростные свойства. Методы испытаний. ГОСТ 22748—77 Автотранспортные средства. Номенклатура наружных размеров. Методы измерений
ГОСТ 22895—77 Тормозные системы и тормозные свойства автотранспортных средств. Нормативы эффективности. Общие технические требования
ГОСТ 23170 —78 Упаковка для изделий машиностроения. Общие требования ГОСТ 23181—78 Приводы тормозные гидравлические автотранспортных средств. Общие технические требования
ГОСТ 24098—80 Полуприцепы-контейнеровозы. Типы. Основные параметры и размеры ГОСТ 25478—91 Автотранспортные средства. Требования к техническому состоянию по условиям безопасности движения. Методы проверки
ГОСТ 27352—87 Автотранспортные средства для заправки и транспортирования нефтепродуктов. Типы, параметры и общие технические требования
ГОСТ 27436—87 Внешний шум автотранспортных средств. Допустимые уровни и методы измерений
ГОСТ 27472—87 Средства автотранспортные специализированные. Охрана труда, эргономика. Требования.
3 КЛАСИФІКАЦІЯ, ОСНОВНІ ПАРАМЕТРИ I РОЗМІРИ
- Класифікація
- Спеціалізовані причепи та напівпричепи за транспортним призначенням поділяють на основні типи відповідно до таблиці 1.
Таблиця 1
|
Індекс типу |
Тип |
Вид транспортного засобу |
Спеціалізація |
Умовне позначення |
|
1 |
Для перевезення людей |
Причіп |
Пасажирський |
ПН |
|
Напівпричіп |
НПН |
|||
|
II |
Для перевезення об’ємних вантажів |
Причіп |
Блоковоз |
ПБ |
|
Напівпричіп |
НПБ |
|||
|
Причіп |
Контейнеровоз |
ПК |
||
|
Напівпричіп |
НПК |
|||
|
Причіп |
Для перевезення технологічного обладнання |
ПМ |
||
|
Напівпричіп |
НПМ |
|||
|
III |
Для перевезення лінійних вантажів і лісу у хлистах |
Причіп |
Панелевоз |
ПП |
|
Напівпричіп |
НПП |
|||
|
Причіп |
Фермовоз |
ПФ |
||
|
Напівпричіп |
НПФ |
|||
|
Причіп |
Колоновоз Плитовоз Трубовоз Опоровоз |
пл |
||
|
Напівпричіп |
нпл |
|||
|
Причіп-розпуск |
ПРЛ |
|||
|
Причіп-розпуск |
Лісовоз |
ПРХ |
||
|
IV |
Для перевезення пилоподібних, рідких І напіврідких вантажів |
Причіп |
Цистерна |
ПЦ |
|
Напівпричіп |
нпц |
|||
|
V |
Для перевезення свійських, диких або спортивних тварин |
Причіп |
Для перевезення тварин |
пт |
|
Напівпричіп |
нпт |
|||
|
VI |
Для перевезення сипких матеріалів |
Причіп |
Самоскид |
ПС |
|
Напівпричіп |
нпс |
|||
|
VII |
Для перевезення великогабаритних та великовагових вантажів |
Причіп |
Важковоз |
пв |
|
Напівпричіп |
нпв |
Закінчення таблиці 1
|
Індекс типу |
Тип |
Вид транспортного засобу |
Спеціалізація |
Умовне позначення |
|
VIII |
Для перевезення вантажів, що потребують захисту від впливу зовнішніх факторів |
Причіп |
Фургон |
ПО |
|
Напівпричіп |
НПО |
|||
|
IX |
Для перевезення вантажів іншої спеціалізації (у тому числі товарів, що швидко псуються) |
Причіп |
Для перевезення вантажів, ЯКІ не відносяться до типів 1—VIIII |
ПІ |
|
Напівпричіп |
НПІ |
|||
|
Причіп-розпуск |
ПРІ |
- Спеціалізовані причепи та напівпричепи за конструктивними ознаками поділяють відповідно до таблиці 2.
Таблиця 2
|
|
Типи |
|
|
r\\JnV/1 ру к І rlDHct UOMcIInCI |
Причепи |
Напівпричепи |
|
Конструкція тримальної системи |
Рамні |
Рамні |
|
|
3 рамою-платформою 3 низькорамною платформою 3 похилою рамою 3 касетною рамою 3 хребтовою рамою 3 опускною рамою 3 розсувною рамою |
|
|
|
Безрамні |
— |
|
Конструкція вантажної площадки |
із змінними параметрами вантажної площадки 3 опускною вантажною площадкою 3 вантажно- розвантажувальним обладнанням |
|
|
Наявність системи керування поворотом |
керовані самовстановні некеровані |
|
|
Кількість осей |
одновісні двовісні тривісні чотиривісні багатовісні |
|
- Основні параметри
- Номенклатура загальних параметрів повинна відповідати ГОСТ 4.400.
- Додаткові параметри, характерні для певних груп за спеціалізацією, установлюють на причепи (напівпричепи):
- контейнеровози — за ГОСТ 19173 та ГОСТ 24098;
- для заправлення та транспортування нафтопродуктів — за ГОСТ 27352;
- для транспортування зріджених вуглеводневих газів з тиском до 1,8 МПа (18 кг/см^) — за ГОСТ 21561;
- для транспортування харчових рідин — за ГОСТ 9218;
- іншої спеціалізації — за відповідною чинною НД та технічними умовами на конкретні транспортні засоби.
-
Величини показників установлюють відповідно до чинного законодавства, чинної НД на конкретні транспортні засоби та технічних умов виробника, затверджених за встановленим порядком.
-
Позначення
- Умовне позначення спеціалізованих причепів та напівпричепів складається з комбінації символів: двох-трьох літер української абетки та чотирьох арабських цифр.
-
Позначення
Перші одна чи дві літери визначають вид транспортного засобу, а остання — тип за призначенням.
Перші дві цифри визначають масу вантажу, що перевозиться, а другі дві цифри — робочу довжину вантажної площадки, об’єм кузова (цистерни) чи інші параметри — за рішенням розробника.
Дробові цифрові позначення заокруглюють до найближчого цілого числа.
За наявності змінних параметрів зазначають максимальну величину.
Приклади умовних позначень
ПП 1208 — причіп-панелевоз, що перевозить вантаж масою 12 т та має довжину вантажної площадки 8 м;
НПЦ 1714 — напівпричіп-цистерна, що перевозить вантаж масою 17 т та має об’єм цистерни 14 м3;
ПРХ 1520 — причіп-розпуск-лісовоз, що перевозить вантаж масою 15 т та має вантажну площадку змінної довжини до 20 м.
- Умовні позначення причепів (напівпричепів)-цистерн:
- для заправлення та транспортування нафтопродуктів — за ГОСТ 27352;
- для транспортування зріджених вуглеводневих газів — за ГОСТ 21561.
- Характеристики
- Спеціалізовані причепи (напівпричепи) виготовляють відповідно до вимог цього стандарту та технічних умов на конкретні типорозміри за робочими кресленнями, оформленими за встановленим порядком.
- Кліматичне виконання та категорії розміщення за ГОСТ 15150.
- Конструкція спеціалізованих причепів (напівпричепів) повинна забезпечувати працездатність протягом терміну служби, зазначеного в технічних умовах на конкретні транспортні засоби за умови виконання споживачем правил експлуатації.
- Загальні технічні вимоги — за ГОСТ 3163.
- Вимоги призначення
4.1.5. Величини показників призначення встановлюють у технічних умовах на певний тип транспортного засобу.
- Габаритні розміри, показники маси, осьові навантаження та швидкість руху спеціалізованого причепа (напівпричепа) повинні бути узгоджені з тяговими параметрами та розмірами автомобіля-тягача.
- Параметри вантажної площадки спеціалізованого причепа (напівпричепа) повинні бути узгоджені з параметрами вантажу, що перевозиться.
- Вимоги надійності
- Показники надійності повинні бути не менше:
- середнє напрацювання на відмову — 16 тис. км;
- середній ресурс до першого капітального ремонту — відповідно до вимог ГССТ 3163;
- призначений термін спужби — не менше 10 років.
- Методи розрахунку показників надійності — за ДСТУ 2862,
- Додаткові параметри надійності та їхні величини встановлюють за погодженням із споживачем у технічних умовах на транспортний засіб, затверджених за встановленим порядком.
- Вимоги ергономіки
- Ергономічні вимоги — за ГОСТ 27472.
- Зусилля на рукоятках механізмів, органів керування та пристроїв для підіймання бортів, трапів — за ГОСТ 3163.
- Вимоги технологічності
- Конструкція спеціалізованих причепів (напівпричепів) повинна забезпечувати можливість застосування під час їхнього виготовлення блочно-модульного чи агрегатного методу збирання.
- Експлуатаційна технологічність та ремонтопридатність — за ГОСТ 21624.
- Конструкція спеціалізованих причепів (напівпричепів) повинна забезпечувати можливість здійснення щоденного технічного обслуговування одним водієм.
- Рекомендована трудомісткість технічного обслуговування та поточного ремонту — згідно з нормативами, викладеними в таблиці 3.
Таблиця З — Трудомісткість технічного обслуговування
Трудомісткість у люд.-год
|
Тип рухомого складу |
Маса вантажу, що перевозиться, т |
Нормативи трудомісткості |
|||
|
на одне ТО, не більше |
на 1000 км пробігу |
||||
|
ЩО |
ТО-1 |
ТО-2 |
поточний ремонт |
||
|
Одновісні причепи |
до 3 |
0,1 |
0,4 |
2,2 |
0.4 |
|
Двовісні причепи |
до 8 |
0,2-0,3 |
0,8-1,0 |
4,4—5,7 |
1,2-1.5 |
|
Двовісні причепи |
понад 8 |
0,3 |
1.3-1,6 |
6,0-6,3 |
1,9-2.1 |
|
Напівпричепи |
понад 8 |
0,2-0,3 |
0,8-1.0 |
4,3-5,0 |
1.1-1,5 |
|
Примітка. Залежно від спеціалізації рухомого складу, конструктивних особливостей та умов експлуатації трудомісткість уточнюють у технічних умовах на конкретний транспортний засіб. |
|||||
- Конструктивні вимоги
- Тип причепів (напівпричепів) за конструктивними ознаками установлюють технічним завданням на конкретний транспортний засіб.
- Конструкція та обладнання повинні відповідати вимогам до перевезення вантажів певної спеціалізації.
- Гранично допустимі габаритні розміри спеціалізованих транспортних засобів повинні бути відповідними до таблиці 4.
- Максимальне статичне осьове навантаження на колеса ходового візка причепів (напівпричепів) повинне бути, т,не більше:
- для одновісних 10;
- для двовісних 16;
- для тривісних 22.
- Конструктивні вимоги до причепів (напівпричепів), призначених:
- для заправлення та транспортування нафтопродуктів — за ГОСТ 27352;
- для транспортування зріджених вуглеводневих газів із тиском до 1,8 МПа — за ГОСТ 21561;
Таблиця 4 — Гранично допустимі габаритні розміри
Розміри у метрах
Причепи
Параметри
Напівпричепи
2.5
4.0
16,5
2.5
4.0
18,35
Габаритні розміри, не більше;
^ ширина висота
довжина (у складі автопоїзда)
Примітка. Допускається збільшення габаритної довжини до 22 м для автопоїздів з двома чи більше причепами.
- ДЛЯ транспортування харчових рідин — за ГОСТ 9218;
- для контейнеровозів — за ГОСТ 19173 та ГОСТ 24098,
- Поворотний пристрій причепа (напівпричепа) повинен забезпечувати:
- можливість повороту передньої осі (ходового візка), а також тягача на кут не менше 90° у кожен бік відносно поздовжньої осі автопоїзда у разі неповоротної задньої осі (ходового візка) причепа та на кут не більше 45° для конструкцій причепів (напівпричепів) з усіма керованими осями (ходовими візками);
- можливість маневрування автопоїзда під час руху заднім ходом.
- Приєднувальні розміри — за ГОСТ 2349, ГОСТ 3163 та ГОСТ 12105.
- Гальмівні системи та приводи до них —за ГОСТ 4364, ГОСТ 22895 та ГОСТ 23181.
- Прилади зовнішні світлові та ліхтарі зовнішні сигнальні та освітлювальні — за ГОСТ 6964 та ГОСТ 8769.
- Деталі дерев’яні вантажних платформ — за ГОСТ 9008.
- Вимоги до сировини, матеріалів, купованих виробів
- Куповані вироби та матеріали, які використовують для виготовлення причепів (напівпричепів) повинні відповідати вимогам креслень, ТУ та чинних стандартів і мати паспорт, сертифікат чи ярлик підприємства-виробника.
- Куповані вироби з обмеженим терміном зберігання установлюють на причіп (напівпричіп) не пізніше терміну, визначеного ТУ або іншим документом на поставку цих виробів.
- Для виготовлення деталей, вузлів, агрегатів причепів (напівпричепів), які працюють під навантаженням або в кліматичних зонах з температурою нижче мінус 40°, не дозволяється використовувати киплячі сталі.
- Комплектність
- Комплект поставки, згідно з чинною НД на причепи (напівпричепи), повинен містити інструмент, приладдя, запасні частини та експлуатаційну документацію.
-
Експлуатаційна документація повинна відповідати вимогам ГОСТ 2.601 і, в загальному випадку, містити: паспорт (формуляр), інструкцію з експлуатації, паспорти обладнання, що працює під тиском, та експлуатаційні документи на комплектувальні вироби.
- Маркування
- Маркування причепів та напівпричепів повинне здіснюватися згідно з ДСТУ 3525 та ГОСТ 3163.
- Пакування
- Вимоги до пакування встановлюють у технічних умовах на причепи (напівпричепи) згідно з ГОСТ 23170.
5.1. Вимоги електробезпеки
- Електрообладнання причепів та напівпричепів повинне відповідати ГОСТ 12.1.019, ГОСТ 12.2.007.14, ГОСТ 21561 та ГОСТ 27352.
- Вимоги пожежної безпеки
- Причепи та напівпричепи повинні відповідати ГОСТ 12.1.004, ГОСТ 21561 та ГОСТ 27352.
- Вимоги вибухобезпеки
- Причепи та напівпричепи, призначені для транспортування речовин, здатних створювати вибухонебезпечне середовище, повинні відповідати ГОСТ 12.1.010.
- Загальні вимоги безпеки до причепів (напівпричепів) — за ГОСТ 12.2.003
- Причепи (напівпричепи) для перевезення небезпечних, великогабаритних та великовагових вантажів повинні відповідати чинним нормативним документам.
- Вимоги безпеки під час експлуатації та обслуговування
- Причепи та напівпричепи згідно із спеціалізацією повинні відповідати вимогам безпеки за ГОСТ 3163, ГОСТ 21561, ГОСТ 27352, ГОСТ 27472 та цього стандарту протягом усього терміну служби.
- Розташування, кількість і колір зовнішніх світлових приладів — за ГОСТ 8769.
- Гальмівні системи та гальмівні якості — за ГОСТ 22895,
- Конструкція спеціалізованих транспортних засобів повинна забезпечувати їхню бічну стійкість під час повороту.
- Конструкція причепів (напівпричепів) повинна забезпечувати безпечний та вільний доступ до обслуговуваних вузлів та агрегатів.
- Рівень зовнішнього шуму, що створюється причепом (напівпричепом) — за ГОСТ 27436.
- Самоскидні спеціалізовані транспортні засоби пов,инні бути обладнані пристроєм, що утримує кузов у піднятому стані під час ТО чи ремонту.
- Вимоги до засобів захисту і заходи із забезпечення безпеки
- Спеціалізовані транспортні засоби, обладнані механічним поворотним пристроєм, повинні мати конструктивні елементи, які захищають людей від травм у разі руйнування приводних тросів, штанг тощо.
- На всіх спеціалізованих транспортних засобах повинні бути передбачені пристрої, що запобігають перекиданню вантажу.
- Самоскидні спеціалізовані транспортні засоби повинні бути обладнані пристроями, які обмежують кут підіймання кузова.
- Конструкція поворотного пристрою спеціалізованих траннспортних засобів повинна забезпечувати можливість прямолінійного (без виїзду на зустрічну смугу) руху автопоїзда, а також мати механізм блокування поворотних осей, візків, коліс у разі руйнування деталей пристрою.
- Гальмівні системи причепів (напівпричепів) повинні бути обладнані пристроями для забезпечення автоматичної зупинки у випадку пошкодження з’єднувальних гальмівних магістралей, а також елементів приводу керування поворотом у керованих причепах (напівпричепах).
- Написи, інформаційні таблиці тощо, які містять вимоги до застережних заходів під час транспортування, експлуатації та зберігання причепів (напівпричепів) повинні відповідати ГОСТ 12.4.026, ГОСТ 19433, ГОСТ 27352, Правилам дорожнього руху України.
- Коди екстрених заходів, зазначені на інформаційних таблицях небезпеки, обов’язкові до виконання в разі небезпеки, повинні бути відповідними до таблиці 5.
Таблиця 5
Літери коду екстрених заходів
Зміст екстрених заходів
Цифри коду екстрених заходів
К
Воду не застосовувати! Застосовувати сухі вогнегасні засоби
Застосовувати водяні струмені
Застосовувати розпорошену воду
Застосовувати пінні вогнегасники або суміші на основі хладонів
Запобігати попаданню речовин у стічні води та водойми
Необхідний повний комплект захисного одягу та дихальний апарат
Необхідна евакуація людей
- Причепи (напівпричепи) у частині охорони праці повинні відповідати ГОСТ 27472.
- Матеріали та покриття за відсутністю шкідливого впливу на здоров’я людей повинні відповідати вимогам чинних стандартів.
- На зовнішніх та внутрішніх поверхнях причепів (напівпричепів) не повинно бути гострих частин, які можуть спричинити травмування людей.
- Рукоятки керування механізмами причепа (напівпричепа) повинні бути розташовані праворуч у напрямку руху чи ззаду
6 ВИМОГИ ОХОРОНИ НАВКОЛИШНЬОГО СЕРЕДОВИЩА
Екологічні вимоги до спеціалізованих транспортних засобів повинні відповідати Закону України «Про дорожній рух» та Державним стандартам у галузі охорони природи.
- Для перевірки відповідності причепів (напівпричепів) вімогам НД підприємство- виробник проводить приймально-здавальні та періодичні випробування.
- Приймально-здавальним випробуванням підлягає кожний причіп (напівпричіп).
- До початку приймально-здавальних випробувань ВТК повинен прийняти всі складальні одиниці згідно з системою контролю, прийнятою на підприємстві, скласти акти прихованих робіт. Приймально-здавальні випробування причепів (напівпричепів) здійснюють у зібраному стані. Комплектність та регулювання — згідно з вимогами конструкторської документації та ТУ на продукцію.
- Програма приймально-здавгільних випробувань у загальному вигляді повинна містити перевірку якості складання та виготовлення, габаритних та приєднувальних розмірів, гальмівної системи у частині конструкції та якості, електрообладнання, змащування, швів зварних з’єднань, ходової частини, фарбування, матеріалів та купованих виробів, комплектності, марковання, паковання та вимог безпеки.
- За невідповідності причепів (напівпричепів) вимогам НД ійснюють повторні випробування. В разі незадовільних результатів повторних випробувань причіп (напівпричіп) бракують.
- Ходові випробування під час приймально-здавальних випробувань підприємство-виробник не виконує.
- Для перевірки відповідності причепа (напівпричепа) експлуатаційним вимогам та таким, які не підлягають перевірці під час приймально-здавальних випробувань, а також перевірки сталості показників якості, виробник здійснює періодичні випробування.
- Періодичним випробуванням не рідше ніж один раз у З роки підлягає один причіп (напівпричіп) з річного випуску, який проходив приймально-здавальні випробування.
- Програма періодичних випробувань у загальному випадку повинна містити перевірку параметрів маси, поперечної стійкості, швидкості руху, ширини габаритного коридору, зусиль на органах керування, ефективності гальмівних систем.
- Періодичні випробування здійснюють також із метою сертифікації продукції. У цьому разі в програму випробувань повинні вводитись вимоги, обов’язкові для сертифікованої продукції.
- Результати періодичних випробувань оформлюють протоколом, а приймально- здавальних — актом та свідоцтвом про приймання за ГОСТ 2.601.
- Основні зовнішні розміри причепів (напівпричепів) на відповідність 3.2, 4.1.5.2 (у частині габаритних розмірів), 4.1.5.3, 4.1.9.3, 4.1.9.7 перевіряють згідно з ГОСТ 22748.
- Вимоги безпеки до технічного стану на відповідність 4.1.9.8 та розділу 5 перевіряють згідно з ГОСТ 25478 та ГОСТ 22895.
- Контроль електричного обладнання причепів (напівпричепів) на відповідність 4.1.9.9 здійснюють згідно з ГОСТ 3940 та ГОСТ 8769.
- Показники швидкісних властивостей на відповідність 4.1.5.2 (у частині швидкості руху) — контролюють згідно з ГОСТ 22576.
- Параметри маси причепа (напівпричепа) на відповідність 3.2, 4.1.9.4, 4.1.5.2 (у частині показників маси) контролюють згідно з додатком А.
- Якість швів зварних з’єднань контролюють за ГОСТ 3242 методами, що .не руйнують конструкцію. •
- Показники надійності та довговічності на відповідність 4.1.6 перевіряють за результатами підконтрольної експлуатації.
- Характеристики повороту автопоїзда на відповідність 4.1.9.6 визначають згідно з додатком А.
- Лакофарбове покриття перевіряють за ГОСТ 7593.
- Перевірка якості, розмірів, характеристик матеріалів і купованих виробів на відповідність 4.2 здійснюють згідно з чинною нормативною документацією.
- Параметри цистерн для транспортування нафтопродуктів визначають згідно з додатком А.
- Параметри гідрообладнання контролюють за ГОСТ 14658, ГОСТ 7108, ГОСТ 18764, ГОСТ 20245.
- Контроль на відповідність 4.1.1 цього стандарту повинен забезпечуватись технологічним процесом підприємства-виробника.
-
ТРАНСПОРТУВАННЯ ТА ЗБЕРІГАННЯ
- Транспортування причепа (напівпричепа) здійснюють власним ходом, залізничним, повітряним чи водним транспортом згідно з технічними умовами, що діють на відповідному виді транспорту.
- Умови транспортування та зберігання в частині впливу кліматичних чинників зовнішнього середовища — за ГОСТ 15150.
- Усі деталі та вузли причепів (напівпричепів), які не мають захисного покриття, повинні мати тимчасовий протикорозійний захист, за винятком виробів чи поверхонь, що зберігають експлуатаційні та декоративні властивості без покриття протягом терміну служби.
- Тимчасовий протикорозійний захист та консервація спеціалізованих транспортних засобів на період їхнього транспортування та зберігання — відповідно до вимог ГОСТ 9.014 за умови зберігання на відкритих майданчиках.
- Умови зберігання автомобільних шин повинні відповідати вимогам ГОСТ 5513.
-
ВИМОГИ до ЕКСПЛУАТАЦІЇ (РЕМОНТУ)
- Експлуатація причепів (напівпричепів) повинна відбуватись у технічному стані, який відповідає вимогам ГОСТ 25478 та інструкції з експлуатації на конкретний транспортний засіб.
- Умови експлуатації спеціалізованих транспортних засобів у частині впливу кліматичних чинників навколишнього середовища — згідно з ГОСТ 15150.
- Умови експлуатації лакофарбового покриття причепів (напівпричепів) для макро- кліматичних районів та категорій розміщення за ГОСТ 15150 повинні відповідати вимогам ГОСТ 9.104.
- Періодичність технічного обслуговування причепів (напівпричепів) становить:
- щоденного обслуговування (ЩО) — один раз у робочі дні незалежно від кількості робочих змін;
- технічного обслуговування № 1 (ТО-І) —4000 км пробігу, не менше;
- технічного обслуговування № 2 (ТО-2) — 16000 км пробігу, не менше;
- сезонного технічного обслуговування (СО) — двічі на рік: перед початком осінньо- зимової та весінньо-літньої експлуатації.
-
ГАРАНТІЇ ВИРОБНИКА
- Гарантійний термін експлуатації причепів (напівпричепів) повинен визначатись у технічних умовах на конкретний тип транспортного засобу і складати не менше 12 місяців.
- Гарантійне напрацювання повинне бути не менше ЗО тис.км.
- Гарантійний термін експлуатації та гарантійне напрацювання причепів (напівпричепів) обчислюють з дня введення їх в експлуатацію, але не пізніше 6 місяців з дня придбання у виробника.
- Гарантійний термін на комплектувальні вироби та складові частини виробу має дорівнювати гарантійному терміну на основний виріб, якщо інше не передбачене у стандартах або технічних умовах на основний виріб.
- Розділ «Гарантії виробника» викладають за формою, наведеною нижче.
Виробник гарантує відповідність____
найменування виробу
вимогам цього стандарту (технічних умов) за умови виконання вимог з
експлуатації, зберігання, транспортування тощо
f
гарантійний термін_________________________
вид та тривалість
з моменту введення в експлуатацію становить
місяців, років.
тис. км.
Методи контролю параметрів причепів (напівпричепів), не регламентованих чинними державними стандартами:
А.1 Контроль параметрів маси причепа (напівпричепа) здійснюють за ОСТ 37.001.408 А.2 Контроль характеристик повороту автопоїзда у складі тягача та причепа (напівпричепа) здійснюють вимірами параметрів траєкторій, утворюваних відбитками коліс автопоїзда під час повороту. Відбитки, які визначають траєкторію руху автопоїзда, одержують за допомогою крейди чи фарби, нанесених на протектор необхідних коліс тягача та причепа (напівпричепа). Перевірку здійснюють на рівному з твердим покриттям майданчику, що дозволяє наскрізний проїзд автопоїзда під час повороту на 90°.
А.3 Контроль параметрів цистерн для транспортування нафтопродуктів здійснюють за інструкцією 36—55.
Ключові слова: спеціалізовані транспортні засоби, причепи, напівпричепи, класифікація, параметри, розміри, технічні вимоги, вимоги безпеки.
4. Узагальнення нових знань(4 хв)
Розкрити спектр думок по заданій темі
5. Домашнє завдання (1 хв)
Вивчити даний матеріал .Розширити свої знання по темі використавши матеріали інтернет ресурсів
НОВІ СІЛЬСЬКОГОСПОДАРСЬКІ МАШИНИ
ПЛАН-КОНСПЕКТ УРОКУ
ТЕРМІН ЧАСУ 1 ГОД
Тема : Сучасні землеобробні машини.Сучасні посівні і садильні машини.Сучасні машини для внесення добрив.
Навчальна дисципліна: Сільськогосподарські машини
Урок№__59 Дата проведення __________ Група ________
Мета навчального заняття:
* продовжити вивчення методів і прийомів виконання механізованих робіт у сільському господарстві та шляхів і засобів підвищення родючості ґрунтів.
Навчальна:
* сприяти збагаченню знань учнів про сільськогосподарське виробництво;
* сприяти активізації їх розумової діяльності;
* створювати умови для встановлення зв'язку теорії з практикою, з життєвими явищами і виробничими процесами.
Розвиваюча:
* продовжити розвиток умінь, пов'язаних зі сприйняттям і аналізом джерел;
* сприяти розвитку спостережливості і самостійного осмислювання окремих зв'язків, відносин, ознак між собою;
* продовжити виховання навичок культури мовного спілкування;
Виховна:
* продовжити виховання позитивного ставлення до професії Тракторист;
* сприяти формуванню глибокого пізнавального та емоційного інтересу до сільськогосподарського виробництва;
* сприяти прояву задоволеності своєю діяльністю.
Методи навчання:
• словесний;
• дослідний;.
Форма проведення уроку: комбінована
Форма навчальної діяльності: фронтальна, групова, Індивідуальна.
Засоби навчання:
* роздатковий матеріал;
* слово викладача;
• маркер;
• дошка.
• мультимедійний проектор
• компьютер
Хід уроку:
Організаційна діяльність викладача:
1. Організаційний момент (5 хв)
Підготувати учнів до роботи
2. Цілепокладання, мотивація (5 хв)
Спонукати до активного сприйняття і осмислювання матеріалу, викликати інтерес і активність, створити творчу атмосферу колективної роботи.
Визначити тему, цілі і завдання уроку
3. Вивчення нового матеріалу(30 хв)
КОНСПЕКТ УРОКУ
Сільськогосподарське машинобудування традиційно займає важливе місце в структурі машинобудівного комплексу України. Воно орієнтується на райони виробництва сільськогосподарської продукції, а його розміщення пов'язане із зональною спеціалізацією сільського господарства. В Україні збудовано великі спеціалізовані підприємства для виготовлення землеобробних машин (плугів, культиваторів), сівалок, комбайнів, навантажувачів, причепів, обладнання для кормовиробництва і тваринництва. Найбільшим центром сільськогосподарського машинобудування є Харків (мотори для самохідних комбайнів), Одеса (тракторні плуги), Кіровоград (сівалки), Дніпропетровськ і Тернопіль (бурякозбиральні комбайни), Херсон (кукурудзозбиральні комбайни, створюється виробництво зернозбиральних), Бердянськ (жниварки), Львів (хімсільгоспмашини). Обладнання для кормовиробництва і тваринництва виробляють у Бердянську, Ніжині, Умані, Ковелі, Коломиї та Білій Церкві. Заводи з випуску інших сільськогосподарських машин та запасних частин до них є в Києві, Мелітополі, Донецьку, Луганську, Кременчуці, Конотопі, Миколаєві та Первомайську.
У перспективі машинобудування, сільськогосподарське машинобудування повинно зайняти більш вагоме місце як у структурі промисловості, так і у формуванні експорту України. Необхідно удосконалити галузеву структуру машинобудування, розширити асортимент його продукції за рахунок підвищення питомої ваги галузей, що виробляють товари народного споживання. Потрібна модернізація машинобудівних заводів, їх технічне переоснащення з використанням сучасних технологій і значне підвищення за рахунок цього якості машин, їх конкурентоздатності. Необхідно налагодити виробництво високоефективних машин та їх систем для всіх галузей і сфер народного господарства, приладів і апаратів, швидкісної електронно-обчислювальної техніки нових поколінь, виробництва систем зв'язку, засобів управління, автоматизації тощо. Спеціалізацію і кооперування виробництва в машинобудуванні необхідно орієнтувати на вітчизняні підприємства, створювати замкнуті цикли виробництв у середині країни.
Сучасна стратегія державної промислової політики України в галузі машинобудування передбачає зростання темпів випуску наукоємної продукції високого технологічного рівня, освоєння нових конкурентоздатних зразків техніки, підвищення якості й ефективності виробництва з орієнтацією на потреби внутрішнього ринку та збільшення експортного потенціалу.
Для цього передбачається прискорити структурну перебудову машинобудівного комплексу на основі збільшення обсягів виробництва у таких пріоритетних галузях: ракетно-космічній, літакобудуванні, суднобудуванні, інформаційних та телекомунікаційних системах, важкому машинобудуванні, сільськогосподарському машинобудуванні, приладобудуванні та електротехнічній промисловості.
Найбільші підприємства сільськогосподарського машинобудування є в Одесі (засноване 1854), Кропивницькому («Червона зірка», 1874), Харкові («Серп і молот», 1875), Львові («Львівсільмаш», з 1945), Оріхові («Орсільмаш», з 1929); у Херсоні виробляються (з 1909) бурякові комбайни (виробництво зернових комбайнів у Дніпрі припинено й перенесено до Ростова-на-Дону).
Галузева структура і особливості розміщення
Сільськогосподарське машинобудування традиційно займає важливе місце в структурі машинобудівного комплексу України. Воно орієнтується на райони виробництва сільськогосподарської продукції, а його розміщення пов'язане із зональною спеціалізацією сільського господарства. Вагомий вплив на розміщення с/г машинобудування та тракторобудування справляє споживчий чинник.
В Україні збудовано великі спеціалізовані підприємства для виготовлення землеобробних машин (плугів, культиваторів), сівалок, комбайнів, навантажувачів, причепів, обладнання для кормовиробництва і тваринництва.
Найбільшим центром сільськогосподарського машинобудування є Харків (мотори для самохідних комбайнів), Одеса (тракторні плуги), Кропивницький (сівалки), Дніпро і Тернопіль (бурякозбиральні комбайни), Херсон (кукурудзозбиральні комбайни, створюється виробництво зернозбиральних), Бердянськ (жниварки), Львів (хімсільгоспмашини).
Обладнання для кормовиробництва і тваринництва виробляють у Бердянську, Ніжині, Умані, Ковелі, Коломиї та Білій Церкві. Заводи з випуску інших сільськогосподарських машин та запасних частин до них є в Києві, Мелітополі, Донецьку, Луганську, Кременчуці, Конотопі, Миколаєві та Первомайську
Машини для рослинництва:
- ґрунтообробні (лемішні та спеціальні плуги, дискові борони, ротаційні ґрунтообробні для боротьби з вітровою та водяною ерозією ґрунту, комбіновані ґрунтообробні машини та агрегати, ґрунтообробні для зрошувального землеробства, машини для покращення лугів та пасовищ, машини та інструмент для передпосівної обробки ґрунту та доглядом за сільськогосподарськими культурами, машини та інструмент для прибирання каміння тощо);
- для сівби, садіння, внесення добрив, захисту рослин та зрошення (сівалки, посадочні машини, для внесення добрив, для захисту рослин, машини та обладнання для зрошування);
- для збирання та переробки зерна (зернозбиральні комбайни, валкові жатки, машини та обладнання для очистки та сепарації зерна і насіння, зерносушилки тощо);
- для збирання картоплі, овочів та луб’яних культур (картоплезбиральні машини, машини для збирання овочевих культур, для збирання буряка та кормових коренеплодів, для збирання луб’яних культур);
- для збирання фруктів;
- для обробки та механізації сховищ картоплі, овочів та фруктів;
- вантажно-розвантажувальні;
- для закритого ґрунту (гідропонні машини, машини для вирощування і посадки розсади, грибів, системи автоматичного регулювання параметрів технологічних процесів вирощування рослин);
- машини для обробки та збору чаю;
- сінозбиральні;
- машини та обладнання для пресування, гранулювання та брикетування кормів;
- кормозбиральні комбайни;
- обладнання для активної вентиляції і сушки трав’яних кормів.
* KVERNELAND РОЗРОБИВ НАПІВПРИЧІПНИЙ ПЛУГ ДЛЯ ПОТУЖНИХ ТРАКТОРІВ
* Модель Variomat 6300 s характеризується оптичною конструкцією нового покоління, яка проведена з метою зменшення кількості зварних швів. Це забезпечує підвищення міцності. Як у всіх плугів бренду, конструкція всередині порожня для оптимізації ваги збірки. Конструкція кузова профільована, а зазор під рамою становить 80 см.для адаптації до будь-яких умов, корпусу агрегату можливо легко зняти або додати. Регулювання відвалів також централізована і швидка. Регулювання робочої глибини здійснюється попарно. Точка повороту розташована безпосередньо за головкою зчеплення, що зменшує зусилля на рукоятці трактора і кут нахилу керма. Заднє колесо гідравлічно з'єднане з обертовим пристроєм, що полегшує перестановку шляхових ліній під час руху. Крім того, плуг оснащений системою Varilarge для регулювання робочої ширини з кабіни. За словами виробника, Variomat 6300 S є першим з напівпричіпних плугів нового покоління, який замінив PB. Оснащена великим заднім колесом (440/80 X 24), ця модель доступна у версіях від 5 до 8 корпусів. Доступні зазори між робочими органами 100 і 115 см. для агрегатування, крім традиційної системи Cat 3, Kverneland розробив Cat 4 для роботи з тракторами великої потужності
Плуг Kverneland 6300 s Variomat став переможцем конкурсу "Машина року" в категорії "Обробіток ґрунту" на міжнародній виставці AGRITECHNICA 2019
Kverneland 6300 s Variomat-перша модель в новій серії великих напівнавісних оборотних плугів, сконструйованих спеціально для потужних тракторів. Ряд технологічних рішень при його створенні інженери запозичили у» розумного " плуга 2500 i-Plough, який в 2017 році був удостоєний безлічі нагород в європейських країнах, а також впровадили нові розробки.
Система Variomat-регулювання робочої ширини "на ходу" від 1-го до останнього корпусу. Система Variomat має багато переваг. Регулюючи ширину оранки з кабіни трактора, ви не витрачаєте час на зупинку для регулювання робочої ширини. Система забезпечує оптимальну відповідність між умовами грунту, плугом і трактором для максимальної продуктивності. Система Variomat від Kverneland не вимагає технічного обслуговування завдяки унікальному зносостійкому шарнірному з'єднанню між балками і секцією основної рами.
Плуг 6300 s Variomat обладнаний новими стійками Aero-profile, вони не тільки вище стандартних стійок Kverneland, але і сприяють кращому переміщенню грунту. Стійки виштовхують важкі рослинні залишки, що знижує ймовірність блокувань незалежно від відстані між корпусами. Завдяки технології термічної обробки Kverneland вони є порожнистими і міцними. За рахунок обмеження ваги стійок плуг Kverneland легше, відповідно, його легше тягнути. Таким чином, низькі вимоги до тяги знижують витрату палива.
ПОСІВНІ КОМПЛЕКСИ
Посівні комплекси Fenix 3000
Посівний комплекс підходить для висіву аграрних культур (виключаючи просапні) з одночасною обробкою грунту. Комбіновані сівалки дозволяють виконувати кілька операцій за один прохід (культивація, посів, внесення добрив). Агрегати адаптовані для обробки грунтів України, користуються популярністю у аграріїв. Ціна на Посівні комплекси вище, ніж у сівалок, але інвестиції на придбання такої техніки окупаються протягом перших 5 років експлуатації завдяки їх високій продуктивності, витривалості при інтенсивних навантаженнях.
ОСОБЛИВОСТІ ОБЛАДНАННЯ
Посівний комплекс агрегатується з потужними тракторами (від 190 к.с.), розрахований на освоєння за сезон площі до 800 га. обробку грунту і пророблення борозен для насіннєвого ложа забезпечують сошники. Глибина воронок регулюється за допомогою зміни передніх коліс.
Насіння і добрива з завантажувального шнека транспортуються в пневматичний провід з гвинтами, що регулюють витрату посівного матеріалу. За допомогою потоку повітря він подається до розподільника, а потім до лап сошників і в грунт. Інтегровані з сошниками загребателі присипають борозни, катки вирівнюють поверхню.
Сучасні Посівні комплекси, крім основних робочих органів, оснащені додатковими елементами:
радіолокаційними датчиками для контролю швидкості;
системою контролю норми видачі посівного матеріалу;
механізмом планування технологічних доріжок.
Міцна металева конструкція спроектована так, що залишки рослин не забивають робочі органи.
ПЕРЕВАГИ ПОСІВНОГО КОМПЛЕКСУ
Посівний комплекс користується попитом завдяки таким характеристикам:
багатофункціональність-скорочує час на виконання комплексних посівних робіт;
висока продуктивність-підходить для великих площ (від 10 га / добу);
запас міцності рами з товщиною стінок близько 5 мм розрахований на підвищені навантаження;
регулювальні механізми допускають експлуатацію на рельєфній місцевості.
Одночасне виконання комплексу сільськогосподарських операцій за допомогою таких агрегатів дозволяє провести посівні роботи в стислі терміни. Складні конструкції з колесами легко транспортувати на потрібну ділянку.
MASCHIO GASPARDO оновив техніку для посіву та внесення добрив
Компанія Maschio Gaspardo оновила техніку для посіву та внесення добрив на нових сівалках і комбінованих посівних агрегатах Centauro SF і Primavera SF. Previous Next обидві моделі сівалок комбінуються з ротаційною бороною Aquila або Toro з робочою шириною захвату 5 або 6 м і переднім бункером PA2 SF (Seed Fertilizer) з резервуарами для посіву та внесення добрив на 1200 або 800 л. Посівний комплекс Centauro SF доступний у двох версіях: з дисками Vortex SF або подвійними прямими дисками Corex Plus SF. Сівалка обладнана системою незалежного подвійного висіву і внесення, що дозволяє дозувати і висівати дві різні культури на одній лінії. Важкий каток доступний в якості додаткової опції. Посівний комплекс Primavera SF, розроблений для спрощених методів обробки грунту, доступний з робочою шириною захвату 6 м, з 40 або 48 рядами дисків в 4 ряди з прямими сошниками. Сівалка оснащена системою незалежного подвійного спуску, висіву та внесення добрив з можливістю регулювання точки внесення на 3 різних рівнях глибини.
4. Узагальнення нових знань(4 хв)
Розкрити спектр думок по заданій темі
5. Домашнє завдання (1 хв)
Вивчити даний матеріал .Розширити свої знання по темі використавши матеріали інтернет ресурсів
ПЛАН-КОНСПЕКТ УРОКУ
ТЕРМІН ЧАСУ 1 ГОД
Тема : Новітні машини для захисту рослин.Нові машини для вирощування картоплі. Сучасні машини для вирощування цукрових буряків
Навчальна дисципліна: Сільськогосподарські машини
Урок№__60 Дата проведення __________ Група ________
Мета навчального заняття:
* продовжити вивчення методів і прийомів виконання механізованих робіт у сільському господарстві та шляхів і засобів підвищення родючості ґрунтів.
Навчальна:
* сприяти збагаченню знань учнів про сільськогосподарське виробництво;
* сприяти активізації їх розумової діяльності;
* створювати умови для встановлення зв'язку теорії з практикою, з життєвими явищами і виробничими процесами.
Розвиваюча:
* продовжити розвиток умінь, пов'язаних зі сприйняттям і аналізом джерел;
* сприяти розвитку спостережливості і самостійного осмислювання окремих зв'язків, відносин, ознак між собою;
* продовжити виховання навичок культури мовного спілкування;
Виховна:
* продовжити виховання позитивного ставлення до професії Тракторист;
* сприяти формуванню глибокого пізнавального та емоційного інтересу до сільськогосподарського виробництва;
* сприяти прояву задоволеності своєю діяльністю.
Методи навчання:
• словесний;
• дослідний;.
Форма проведення уроку: комбінована
Форма навчальної діяльності: фронтальна, групова, Індивідуальна.
Засоби навчання:
* роздатковий матеріал;
* слово викладача;
• маркер;
• дошка.
• мультимедійний проектор
• компьютер
Хід уроку:
Організаційна діяльність викладача:
1. Організаційний момент (5 хв)
Підготувати учнів до роботи
2. Цілепокладання, мотивація (5 хв)
Спонукати до активного сприйняття і осмислювання матеріалу, викликати інтерес і активність, створити творчу атмосферу колективної роботи.
Визначити тему, цілі і завдання уроку
3. Вивчення нового матеріалу(30 хв)
КОНСПЕКТ УРОКУ
Німецький виробник сільгосптехніки Lemken представив самохідний обприскувач Nova 14. Previous Next "
Самохідна машина з просторою кабіною, безліччю варіантів Регулювання шасі, новою автоматичною системою ведення штанги, баком місткістю від 4800 л до 7200 л і робочою шириною від 24 м до 39 м відповідає найвищим вимогам комфорту та ефективності», — йдеться в повідомленні. Під замовлення Обприскувач Nova може бути укомплектований триступінчастою системою фільтрації повітря 4-ї категорії. При цьому в кабіні постійно створюється підвищений тиск, завдяки чому попереджається проникнення всередину парів. Автоматична система кондиціонування, радіоприймач з підтримкою Bluetooth і речові відділення входять в комплектацію. Сидіння оснащене пневматичною підвіскою. Всі елементи управління розташовані на ергономічному підлокітнику. Інноваційний джойстик з програмованими кнопками можна налаштувати під індивідуальні вимоги. Управління обладнанням здійснюється за допомогою системи Lemken MegaSpray на терміналі CCI 800 або CCI 1200. Також підтримуються включення і виключення секцій, зміна норми внесення, контроль колії по GPS і управління завданнями. Платформа agrirouter для обміну даними з машинами різних виробників забезпечує зв'язок з системою управління сільгосппідприємством в офісі. Телескопічні осі шасі Nova дозволяють змінювати ширину колії в діапазоні від 1,8 м до 2,3 м.Під замовлення можлива установка гідравлічної системи зміни ширини колії. Також можна використовувати шини шириною від 300 до 650 мм.завдяки повному приводу колеса заднього моста рухаються точно слід в слід за колесами переднього моста. Дорожній просвіт становить 1,20 м.але передбачена можливість підйому шасі за допомогою гідравліки на висоту до 1,60 м. Окрема Підвіска кожного колеса з гідропневматичною амортизацією забезпечує спокійний хід машини і баланс штанги при нерівностях грунту. Оптимальне положення алюмінієвої штанги і відстань до оброблюваної поверхні підтримує система AdaptiveBalancingControl (ABC) від Lemken. Щоб окремі кронштейни штанги налаштовувалися з урахуванням змін культури або місцевості, використовується до 5 датчиків. Вбудований в штангу циркуляційний трубопровід з керованими окремо соплами забезпечує обприскування з мінімальним залишком. Для зрошення по краях без утворення туману наявний промивний шлюз ємністю 55 л, підготовлений для використання закритої системи подачі. Також передбачена можливість регулювання по висоті. За допомогою розташованого вище кольорового дисплея можна управляти гідравлічною системою. Бак для свіжої води має ємність 660 л. інжекторна мішалка з електричним регулюванням і датчиками рівня підтримує однорідність суміші в Баку. Обприскувач Nova від Lemken буде доступний з середини 2020 р.
Картоплесаджальні машини
Щойно сонце повертає на весну, як мільйони українців замислюються про вічне: треба саджати картоплю. Професіонали починають це уже з березня. Багато співвітчизників досягають мети за допомогою банальної лопати. Однак у картопляній царині вже з’явилося чимало засобів механізації.
Як відомо, понад 80% української картоплі вирощується на індивідуальних городах. Але з’явилися вже й фермерські господарства, які займаються виключно (або насамперед) картоплею. Відповідно в Україні випускаються недорогі однорядні саджалки для картоплі, які можуть використовуватися на невеликих ділянках — сакраментальних шести сотках, на яких «другий хліб» вирощують навіть дачники-містяни.
 Наприклад, популярною є картоплесаджалка «Полтавчанка». Завдяки універсальному кріпленню її можна агрегатувати на більшість моделей мотоблоків, доступних в Україні. Для оптимального виконання робіт потрібно, звісно ж, попередньо підготувати ґрунт. Земля має бути без великих пластів і пухкою. «Полтавчанка» допоможе ефективно і дуже швидко посадити картоплю. Глибина висадки може змінюватися від 5 до 18 см, відстань між бульбами — від 190 до 280 мм. Картопля подається із бункера приводом (ланцюговим або стрічковим) від ґрунтозацепів. Через шахту картоплина потрапляє у борозну, нарізану ножем, розташованим спереду. Дискові підгортачі або лопатки, розміщені позаду, закривають борозну. За допомогою спеціальних зірочок на регулюючому механізмі можна з легкістю регулювати крок посадки, залежно від моделі сажалки для картоплі. Бункер однорядної саджалки від різних виробників становить 20–50 л.
Наприклад, популярною є картоплесаджалка «Полтавчанка». Завдяки універсальному кріпленню її можна агрегатувати на більшість моделей мотоблоків, доступних в Україні. Для оптимального виконання робіт потрібно, звісно ж, попередньо підготувати ґрунт. Земля має бути без великих пластів і пухкою. «Полтавчанка» допоможе ефективно і дуже швидко посадити картоплю. Глибина висадки може змінюватися від 5 до 18 см, відстань між бульбами — від 190 до 280 мм. Картопля подається із бункера приводом (ланцюговим або стрічковим) від ґрунтозацепів. Через шахту картоплина потрапляє у борозну, нарізану ножем, розташованим спереду. Дискові підгортачі або лопатки, розміщені позаду, закривають борозну. За допомогою спеціальних зірочок на регулюючому механізмі можна з легкістю регулювати крок посадки, залежно від моделі сажалки для картоплі. Бункер однорядної саджалки від різних виробників становить 20–50 л.
Варто відзначити, що висаджувати таким обладнанням можна не тільки картоплю, а й, наприклад, цибулини квітів. Картоплесаджалка для мотоблоків хоч і невелика, однак може бути оснащена механізмом внесення добрив, що зробить урожай значно багатшим. Такою є, приміром, саджалка «Зоря». Бункер для добрив дозволяє одночасно з посадкою вносити необхідне підживлення. Норма внесення також піддається регулюванню. А деякі моделі можуть зароблювати клубні у ґрунт з одночасним підгортанням. Робоча швидкість її сягає 3 км/год. Що важливо: магазини й сервісні центри саджалок цього типу вже є по всій Україні.
Однак для фермерських господарств потрібна техніка значно більш продуктивна. На ринку вже така є. Зокрема, відома німецька компанія Grimme («Грімме») виготовляє широку лінійку техніки для картоплярства, і серед цих машин є саджальні.
Назвемо популярну модель — чотирирядну картоплесаджалку Grimme GL 34 T, розроблену спеціально для невеликих господарств. Нею можна саджати бульбу як у рівну поверхню, так і в попередньо нарізані гребені ґрунту. Агрегат має бункер вантажопідйомністю 1,7 т. Ємність баків для препаратів агрохімії — 500 л. За допомогою вібрацій днища забезпечується постійний потік картоплі у грядку. Саджалка має високу продуктивність. Агрегатується навіть із тракторами невеликої потужності, як-от МТЗ-80. Покращена експлуатація на схилах досягається за допомогою вертикального пружинного диска діаметром 600 мм. Профіль колеса залишає чіткий слід, що є гарним орієнтиром при нарізці земляних гребенів. На агрегаті передбачений також розпушувач колії. Контроль процесів посадки здійснюється за допомогою відеокамери та монітора. Робоча швидкість — до 8 км/год. Глибина посадки регулюється гвинтом.
 Також має у своєму арсеналі картоплесаджалки відома бельгійська машинобудівна компанія AVR («АВР»). Вона теж виготовляє потужні картоплесаджалки: від дво- до восьмирядних, які вже доступні на українському ринку агротехніки.
Також має у своєму арсеналі картоплесаджалки відома бельгійська машинобудівна компанія AVR («АВР»). Вона теж виготовляє потужні картоплесаджалки: від дво- до восьмирядних, які вже доступні на українському ринку агротехніки.
Візьмемо, до прикладу, дворядну фермерську картоплесаджалку AVR UH 3710. Цей агрегат має фіксований бункер, куди можна засипати до 1000 кг картоплі. Або звернемо увагу на AVR UH 3745. Це чотирирядна причіпна саджальна машина. Її бункер із гідронахилом має місткість до п’яти тонн бульби, і також може бути встановлена система внесення добрив на 1800 кг. Ну, й у найбільшу восьмирядкову AVR UH 3780 можна одразу завантажити до 8 т посадкової картоплі.
Також користуються повагою картоплярів агрегати фірми «Мідема» (Miedema, Нідерланди). Вони теж виготовляються у різних модифікаціях, із різним обсягом бункера і додатковими опціями. Так, скажімо, добрі характеристики має причіпна саджальна машина Miedema CP 42. У неї бункер для картоплі об’ємом 3,6 т. Можливе виконання цим агрегатом таких операцій, як внесення добрив, культивація, розкидання гранулятів та формування гребенів землі.
Цікавою є також ложковий висівний (чи посадковий) апарат цієї машини. Інженери компанії розробили ложечки, нахилені вперед під кутом 8° у піднімальній секції. Вони забезпечують чудовий відбір та відділення картоплі з бункера навіть на горбкуватій ділянці. А система оптичного контролю Eagle-Eye дозволяє уважно стежити за процесом посадки та надає дані, необхідні для рівномірного посіву. Картоплесаджалки ложкового типу гарантують дуже точну відстань між картоплинами у рядку.
Отже, саджалка економить сили і час фермера. Німецькі, голландські, польські й бельгійські агрегати, які вже доступні в Україні, допоможуть у короткі терміни засадити першокласною бараболею плантації у сотні й тисячі гектарів.
Машини для збирання цукрових буряків: конструкції та сучасні вимоги

Враховуючи особливості транспортування коренеплодів цукрових буряків на бурякоприймальні пункти цукрових заводів, використовують три найпоширеніші способи збирання: потоковий, перевалковий та потоково-перевалковий.
За потокового способу збирання коренеплоди цукрові буряки від бурякозбиральних машин доставляють безпосередньо на бурякоприймальні пункти.
За перевалкового — коренеплоди цукрові буряки від бурякозбиральних машин доставляють у польові кагати для тимчасового зберігання та дальшого доочищення з навантаженням буряконавантажувачами в транспортні засоби для перевезення на бурякоприймальні пункти.
За потоково-перевалкового збирання поєднують потоковий та перевалковий способи.
Залежно від обраного способу збирання цукрових буряків і конструкції бурякозбиральних машин можна здійснювати одно-, дво- і трифазне їх збирання.
Однофазне збирання цукрових буряків здійснюють прямим комбайнуванням однією машиною — бурякозбиральним комбайном.
Бурякозбиральні комбайни за кількістю одночасно зібраних рядків поділяють на 1-, 2-, 3- та 6-рядні. За наявністю бункера їх поділяють на бункерні й безбункерні.
За способом агрегатування з енергетичним засобом бурякозбиральні комбайни поділяють на самохідні, монтовані, навісні та причіпні.
Самохідні бурякозбиральні комбайни
Самохідний бурякозбиральний комбайн — це спеціальний або універсальний енергетичний засіб, на якому встановлено, змонтовано, напівнавішено, навішено, причеплено виконавчі механізми, які за один прохід машини по полю здійснюють усі технологічні операції зі збирання гички та коренеплодів цукрових буряків.
Гичкорізи бурякозбиральних комбайнів можуть обладнуватися різальними апаратами копірного, роторного, турбобітного, шабельного, шнекового та стрічкового типів. У конструкціях бурякозбиральних комбайнів найбільшого поширення набули різальні апарати роторного типу. Такий апарат — це вал (порожниста труба), на якому шарнірно прикріплено Г-подібні ножі. На цьому ж валу можуть бути закріплені щітки та била для доочищення головок коренеплодів цукрових буряків.
Гичку цукрових буряків використовують як корм для тварин або органічне добриво. Залежно від використання гички буряку, гичкозбиральні модулі комбайнів мають різні конструктивні особливості. У разі використання гички на корм бурякозбиральні комбайни обладнують стрічковими або прутковими навантажувальними транспортерами. Нині здебільшого використовують стрічкові транспортери. Вони менш металомісткі та енергоємні, ніж пруткові. У разі використання гички як органічного добрива її розкидають по полю. Для цього використовують різні конструкції розкидачів. У разі розкидання гички буряку по полю у вологих умовах роботи або під час атмосферних опадів зафіксовано ускладнення руху автотранспорту, який відвозить коренеплоди. У вітряну погоду під час розкидання гички її соки забруднюють лобове скло автотранспорту. За таких умов роботи практикують відмикання розкидача і гичку укладають у валок. Без дальшого перерозподілу гички буряку з валків по всій зібраній площі поживні речовини в грунті розподіляються неоднаково. Це впливає на рівномірність розвитку та продуктивність нової культури в сівозміні. Крім того, під час розкидання гички буряку по полю на забур’янених ділянках бур’ян штучно розсівається. Для найефективнішого використання гички цукрових буряків її слід збирати на корм або переробляти на органічні добрива в спеціальних місцях (гноєсховищах).
Для поліпшення очищення головок коренеплодів цукрових буряків від решток гички в конструкціях гичкозбиральних агрегатів використовують пасивні та активні дообрізувачі. Найчастіше використовують пасивні дообрізувачі з фіксованою або автоматичною системою регулювання висоти дообрізування.
Бурякозбиральні комбайни оснащують пасивними або активними викопувальними робочими органами.
Пасивні викопувальні органи — це такі знаряддя та пристосування, які в динаміці стало виконують технологічний процес і не потребують приводу. До пасивних робочих органів належать: безприводні дискові, полозково-дискові, лемішні та полозково-ножеві копачі.
Активні викопувальні органи — це такі знаряддя та пристосування, які в динаміці стало виконують технологічний процес і мають примусовий привод. До активних робочих органів належать: бральні, приводні дискові, ротаційно-вилчасті, лемішно-коливальні копачі.
Очисні робочі органи, які в бурякозбиральних комбайнах встановлюють безпосередньо за копачами, за конструкцією поділяються на турбінні, кулачково-бітерні, вальце-шнекові та прутково-транспортерні.
Кулачково-бітерні, вальце-шнекові та прутково-транспортерні типи очисників можуть між собою поєднуватися в різні конструкційні комбінації.
Для додаткового очищення коренеплодів цукрового буряку від землі та рослинних решток під час їх транспортування у бункер або технологічний транспорт у конструкціях бурякозбиральних комбайнів здебільшого використовують пруткові транспортери. Як тягові ланки використовують ребристі гумові стрічки або ролико-втулкові ланцюги.
Загальні компонувальні схеми самохідних бурякозбиральних комбайнів відпрацьовані у двох типових варіантах: із заднім і переднім розміщенням двигуна і відповідним зміщенням бункера. Заднє розміщення двигуна характерне для неуніверсальних, суто збиральних машин, а переднє — для універсальних шарнірно-блочних, що будуються за модульним принципом і мають можливість ширше використовувати енергомодуль.
Усі бурякозбиральні комбайни оснащені бункерами для нагромадження зібраних коренеплодів. Місткість бункерів — від 4 до 40 м3. Бункери невеликої місткості (4–4,5 м3) розміщено ззаду комбайнів, середньої (12,5–25 м3) та великої (40 м3) — між переднім і заднім мостами.
Комбайни бурякозбиральні з великою місткістю бункерів оснащено трьома мостами. Завдяки оснащенню бункерів високопродуктивними вивантажувальними транспортерами, досягається швидке вивантаження коренеплодів навіть із бункерів великої місткості. Тривалість вивантаження — не більше 1 хв.
Більшість самохідних бурякозбиральних комбайнів — 6-рядні, але є й 3-рядні.
Маса 6-рядних самохідних бурякозбиральних комбайнів — 15100–25200 кг, 3-рядних — 9500–12900 кг.
Потужність двигунів, установлених на 6-рядних самохідних бурякозбиральних комбайнах, — 200–480 к.с., на трирядних — 180–260 к.с.
Для полегшення обслуговування самохідні комбайни оснащено автоматизованими системами водіння по рядках і регулювання глибини ходу викопувальних органів, системами автоматичного контролю технологічних і технічних параметрів, системами централізованого автоматичного змащування всіх вузлів, бортовими комп’ютерами, зручними постами керування, комфортабельними кабінами з кондиціонерами та опаленням, потужним електроосвітленням.
Деякі моделі комбайнів передбачають можливість бічного зміщення мостів для запобігання проходженню коліс по одному сліду та зменшення ущільнення грунту.
Передбачено також можливість поворотів передніх і задніх коліс у різні боки (для зменшення радіуса повороту) та в один бік (для забезпечення бічного зміщення всієї машини — система “крабового” ходу). Застосовуються також повороти задніх коліс під певним кутом до напрямку руху та їх автоматична фіксація в повернутому положенні — для запобігання знесенню машини під час роботи на поперечних схилах.
Завдяки фронтальному розміщенню гичкозбирального комбайну й викопувального модулів, що автоматично спрямовуються по рядках, і спеціальних технологічних люфтів активних лемішно-коливальних копачів (±20–30 мм), створюються умови для спрощення й поліпшення виконання технологічного процесу в цілому. Велика протяжність очисного тракту (10–12 м) із зміною напрямків руху та створенням турбінними очисниками значних інерційних зусиль забезпечують належне очищення коренеплодів цукрового буряку від землі, рослинних решток і навіть часткове обминання необрізаної гички у технологічному потоці. Наявність бункерів місткістю 12,5–25 м3 дає змогу формувати великі польові кагати на одному кінці поля. Із збільшенням місткості бункера до 40 м3 коефіцієнт робочих ходів і продуктивність бурякозбирального комбайна зростають на 15–20%.
Завдяки оснащенню комбайнів із великою місткістю бункерів тримостовими ходовими системами з гідростатичним приводом та широкопрофільними шинами (завширшки близько 1,1 м), машини восени мають високу прохідність, а активні лемішно-коливальні копачі, потужні шнекові та турбінні очисники працюють і у вологих умовах, і на важких суглинках.
Поширенню самохідних потужних 6-рядних бункерних комбайнів сприяє їх висока технологічна й технічна готовність працювати навіть за несприятливих пізньоосінніх перезволожених умов, а також бажання вилучити з роботи дорогий технологічний транспорт і мати на збиранні цукрових буряків лиш одного машиніста.
Самохідні бурякозбиральні комбайни виробляють фірми: Franz Kleine, Holmer, Stoll, ROPA (Німеччина), Matrot, Moreau (Франція), TIM (Данія), AGRIFAC, RIECAM, VREDO (Нідерланди), P.Barigelli&C, Italo svizzera (Iталія) та інші.
В Україні найвідоміші такі самохідні бурякозбиральні комбайни: SF-10 фірми Franz Kleine (Німеччина), М-41МН фірми Matrot (Франція), GR-4000, LECTRA-4005 фірми Moreau (Франція), R26.45K та R26.50K фірми ROPA (Німеччина), KRВS фірми Holmer (Німеччина), SR-1800 i SR-2500 фірми TIM (Данія). Зарубіжні бурякозбиральні комбайни дорогі, їх використання ефективне в господарствах з високою урожайністю (понад 50 т/га) та великою площею посіву (сезонний наробіток на комбайн має бути 600–800 га). Україні, яка вирощує цукрові буряки на площі 800 тисяч гектарів, доцільно виробляти власний самохідний бурякозбиральний комбайн, який би відповідав таким вимогам.
Бурякозбиральні комбайни призначено для збирання гички чи розкидання її по полю та збирання коренеплодів цукрового буряку із одночасним навантаженням у транспортний засіб або для нагромадження їх у бункері з дальшим перевантаженням у транспортний засіб.
Бурякозбиральні комбайни обов’язково оснащують автоматичною системою керування напрямком руху машини міжряддями, системою автоматичного контролю за технологічним процесом робочих органів, обліком часу роботи, зібраної площі та за іншою інформацією із її збереженням і можливістю перенесення в комп’ютерну мережу.
Робоча швидкість бурякозбиральних комбайнів має бути не меншою 6,0 км/год, транспортна — близько 20 км/год. Продуктивність за годину основного часу — не менше 0,54 га для 2-рядних, не менше 0,81 — для 3-рядних і не менше 1,62 — для 6-рядних комбайнів. Коефіцієнт надійності виконання технологічного процесу — не менше 0,98, коефіцієнт використання змінного часу — не менше 0,75. Бурякозбиральні комбайни повинні забезпечувати 98,5% збору коренеплодів. У купі зібраних коренеплодів домішок має бути не більше 8,0%, у тому числі рослинних решток — не більше 0,20%. Пошкоджених коренеплодів цукрового буряку може бути не більше 10,0%, у тому числі сильно пошкоджених — не більше 5,0. Питомі витрати палива мають становити для 2-рядних — не більше 24,0 кг/га, для 3- та 6-рядних — не більше 30,0 кг/га. Напрацювання на відмову має бути не менше 50 годин основного часу, коефіцієнт готовності за оперативним часом — не менше 0,95. Питома сумарна оперативна трудомісткість усунення відмов — не більше 0,08 люд·год/год. Середньозмінний оперативний час технічного обслуговування (ТО) — не більше 0,40 год. Питома сумарна оперативна трудомісткість ТО — не більше 0,09 люд.год/год. Питома конструкційна маса на виконанні технологічної операції для 2-рядних комбайнів — не більше 4400 кг/м, для 3-рядних — не більше 5100 і для 6-рядних — не більше 6500 кг/м. Питома матеріаломісткість для 2-рядних — не більше 9700 кг/га/год, для 3-рядних — не більше 11000 і для 6-рядних — не більше 14400 кг/га/год. Оперативна трудомісткість переведення з транспортного положення в робоче і навпаки — не більше 0,10 люд·год. Дорожній просвіт — не менше 300 мм. Бурякозбиральні комбайни повинні відповідати вимогам ДСТУ 2189–93: “Машини сільськогосподарські навісні та причіпні. Загальні вимоги безпеки” та ГОСТ 12.2.019—76 “. Комбайни бурякозбиральні має обслуговувати один тракторист, витрати праці при цьому мають бути для 2-рядних — не більше 2,44 люд·год/га, для 3-рядних — не більше 1,64 і для 6-рядних — не більше 0,82 люд·год/га. Річне завантаження повинне бути не менше 160 годин. Термін експлуатації бурякозбиральних комбайнів — 8 років.
Монтовані бурякозбиральні комбайни
Монтований бурякозбиральний комбайн — це універсальний енергетичний засіб (самохідне шасі), на якому модульно монтують гичкозбиральний та коренезбиральний агрегати, бункер (за його наявності), навантажувальний транспортер та інші пристосування й вузли. Монтовані бурякозбиральні комбайни оснащують такими самими типами робочих органів, як і самохідні.
Причіпні бурякозбиральні комбайни
Усі причіпні бурякозбиральні комбайни мають міцну основну раму, на якій монтують гичкозбиральний і коренезбиральний модулі з механічними або гідравлічними системами приводів, бункер, встановлюють автономну гідросистему, систему автоматичного керування руху рядками.
Причіпні бурякозбиральні комбайни оснащують бункерами-нагромаджувачами різної місткості.
Однорядні бурякозбиральні комбайни агрегатують із енергозасобами, які мають двигуни потужністю 30–55 к.с., а 2- і 3-рядні — із енергозасобами на 75–120 к.с.
Ширина міжрядь цукрових буряків, на яку розраховано комбайни, — 45 і 50 см. В окремих бурякозбиральних комбайнах передбачено можливість зміни ширини міжрядь у межах від 40 до 70 см.
Маса комбайнів залежить від конструкції та ширини захвату. Для 1-рядних бурякозбиральних комбайнів вона становить 2400–2800 кг, 2-рядних — 3600–6300, 3-рядних — 5400–7020 кг.
Усі комбайни розраховано на автоматичне розкидання гички по полю, але окремі їх моделі передбачають оснащення транспортерами або пристроями для навантаження гички в транспортні засоби.
Зрізання гички причіпними бурякозбиральними комбайнами здійснюється в дві фази. Перша фаза — зрізання гички на рівні найвище розміщених головок коренеплодів з одночасним її подрібненням і розкиданням по полю (або навантаженням у кузов транспортного засобу, що рухається поряд). Друга фаза — дообрізування головок коренеплодів.
Першу фазу зрізання гички цукрового буряку здійснюють роторні гичкорізи з горизонтальним валом і шарнірно підвішеними до нього ножами, другу фазу — дообрізувачі з пасивними гребінчастими копірами та пасивними ножами.
Для викопування коренеплодів цукрового буряку використовують лемішно-коливальні копачі, пасивні копачі — “полоз-сферичний диск”, пасивні дискові копачі.
На бурякозбиральних комбайнах, які оснащено дисковими копачами, застосовують диски системи “Опель”, що обертаються завдяки зчіплюванню з грунтом. Для цього на дисках є спеціальні грунтозачіпи.
Для очищення викопаних коренеплодів цукрового буряку від землі та рослинних решток застосовують пруткові турбіни з бічними решітками.
Транспортери — пруткові, виготовлені на основі прогумованих пасів.
Усі бурякозбиральні комбайни обладнано автоматичними системами проходження по рядках та регулювання глибини ходу копачів. Для полегшення обслуговування комбайнів застосовують електрогідравлічні системи керування.
Щоб запобігти бічному зношенню під час роботи на полях із поперечними схилами, комбайни оснащують дисковими ножами-стабілізаторами та системами керування ходовими колесами.
У ходових системах причіпних бурякозбиральних комбайнів застосовують колеса із широкопрофільними шинами для зменшення ущільнення грунту.
Більшість комбайнів оснащено автономними гідросистемами для приводу робочих органів та для керування технологічним процесом.
Найбільшого сучасного поширення набули 2- та 3-рядні причіпні бурякозбиральні комбайни фірм Franz Kleine, Stoll (Німеччина) та ТІМ (Данія). Це 2-рядні KR2 (Franz Kleine), V202 (Stoll), RATIONAL (Becker), MIISA/TE120 (АІМ) та 3-рядкові V300 (Stoll), ROTIONAL (Becker), MIIІSA/TE120 (ТІМ). Україна на КВП “ДКЗ” (Дніпропетровськ) серійно виробляє бурякозбиральний комбайн КСП-2. Причіпні бурякозбиральні комбайни в 60-ті роки виробляли у колишньому СРСР. Це СКД-2 та КСТ-3. У колишній Чехословаччині — ЗVСХ (“АГРОСТРОЙ”, ЙІЧИН), у ФРН — Automatic 3001/5002/5003/5500 (Franz Kleine), в Данії — KRB/S2RE, KRB/S301RE (ТІМ).
Вимоги до якості виконання технологічного процесу монтованими та причіпними бурякозбиральними комбайнами аналогічні до самохідних.
Двофазне збирання цукрових буряків здійснюють дві окремі машини: гичкозбиральна та коренезбиральна.
Машини для збирання цукрового буряку. В Україні серійно виробляють дві марки причіпних гичкозбиральних машин. Це МБП-6 виробництва КВП “ДКЗ”, БМ-6Б виробництва ВАТ “ТеКЗ” та машина МБК-2,7 виробництва КВП “ДКЗ” для збирання гички з кормових коренеплодів. Ці машини призначено для збирання гички на кормові цілі. Тепер вони недостатньо продуктивні, матеріаломісткі, енергоємні, складні та мають недостатній рівень надійності. Показники якості виконання технологічного процесу не повною мірою відповідають чинним вимогам НТД. Нині настала потреба мати в парку гичкозбиральних машин високопродуктивні, прості, маломатеріаломісткі та малоенергоємні гичкозбиральні й гичкозрізувальні машини, які б відповідали таким вимогам. Гичкозбиральні машини призначено для зрізання гички з коренеплодів, доочищення головок від незрізаних решток із одночасним навантаженням їх у транспортні засоби.Гичкозрізувальні машини призначено для зрізання гички з коренеплодів, доочищення головок від незрізаних залишків, видалення гички та рослинних решток із зони рядків із дальшим розкиданням її на вільне від буряків поле.Гичкозбиральні машини обладнують автоматичним регулюванням керування напрямком руху вздовж рядків.Гичкозбиральні та гичкозрізувальні машини можуть бути обладнані системою автоматичного контролю за виконанням технологічного процесу робочими органами, для обліку часу роботи та зібраної площі, іншої інформації з її збереженням і можливістю перенесення в комп’ютерну мережу.
Робоча швидкість машин для збирання цукрового буряку має бути не менше 6,0 км/год, а транспортна — близько 20 км/год. Продуктивність за годину основного часу — не менше 1,62 га. Коефіцієнт надійності виконання технологічного процесу — не менше 0,98, а коефіцієнт використання змінного часу — не менше 0,80. Коренеплодів із нормальним зрізом має бути не менше 85%, а коренеплодів із низьким зрізом — не більше 5%. Коренеплодів із гладкою поверхнею зрізу — 90%. Загальні втрати гички — не більше 10%, у тому числі вільною — не більше 5. У купі має бути не менше 95% гички, грунту допускається — не більше 0,2%. Кількість необрізаної гички на коренеплодах — не більше 1,5%. Вибитих із рядків коренеплодів — не більше 0,1%. Питома витрата палива — не більше 9,0 кг/га для гичкозбиральних і, відповідно, 7,0 — для гичкозрізувальних машин. Наробіток на відмову має становити не менше 50 год для гичкозбиральних і не менше 60 год — для гичкозрізувальних машин. Коефіцієнт готовності за оперативним часом повинен бути не менше 0,96. Питома сумарна оперативна трудомісткість усунення відмов — не більше 0,05 люд·год/год. Середньозмінний оперативний час ТО — не більше 0,30 год і не більше 0,25 год, відповідно. Питома сумарна оперативна трудомісткість ТО — не більше 0,05 та 0,04 люд·год/год, відповідно. Питома конструкційна маса на виконанні технологічної операції — не більше 1020 кг/м і не більше 400 кг/м, відповідно. Питома матеріаломісткість — не більше 2100 і 830 кг/га/год, відповідно. Оперативна трудомісткість переведення з транспортного положення в робоче і навпаки — не більше 0,10 люд·год. Дорожній просвіт — не менше 300 мм. Гичкозбиральні та гичкозрізувальні машини повинні відповідати вимогам ДСТУ 2189–93, мати автоматичну систему навішування на енергетичний засіб, простоту заміни робочих органів, щоб їх міг обслуговувати один тракторист. Витрати праці повинні бути не більшими, ніж 0,77 люд·год/га за нормативного річного завантаження 160 годин. Термін експлуатації машин — 8 років.
Машини коренезбиральні самохідні призначено для збирання коренеплодів, із яких попередньо зрізано гичку, з одночасним навантаженням їх у транспортний засіб.
Машини коренезбиральні самохідні обов’язково оснащують автоматичною системою керування напрямком їх руху по міжряддях, системою автоматичного контролю за виконанням технологічного процесу, за обліком часу роботи та зібраної площі, за іншою інформацією з можливістю її перенесення в комп’ютерну мережу.
Робоча швидкість машин має бути не меншою 6,0 км/год, транспортна — близько 20 км/год. Продуктивність за годину основного часу — не менше 1,62 га. Коефіцієнт надійності виконання технологічного процесу — не менше 0,98, коефіцієнт використання змінного часу — не менше 0,75. Коренезбиральні машини повинні забезпечувати 98,5% збору коренеплодів. У купі зібраних коренеплодів домішок має бути не більше 8,0%, у тому числі рослинних решток — не більше 0,20%. Пошкоджених коренеплодів може бути не більше 10,0%, у тому числі сильно пошкоджених — не більше 5,0. Питомі витрати палива мають становити не більше 15,0 кг/га. Напрацювання на відмову повинно бути не менше 50 год основного часу, коефіцієнт готовності за оперативним часом — не менше 0,95. Питома сумарна оперативна трудомісткість усунення відмов — не більше 0,06 люд·год/год. Середньозмінний оперативний час ТО — не більше 0,30 год. Питома сумарна оперативна трудомісткість ТО — не більше 0,06 люд·год/год. Питома конструкційна маса на виконанні технологічної операції — не більше 3300 кг/м ± 3%. Питома матеріаломісткість — не більше 8000 кг/га/год ± 3%. Оперативна трудомісткість переведення з транспортного положення в робоче і навпаки — не більше 0,10 люд·год. Дорожній просвіт — не менше 300 мм. Коренезбиральні машини повинні відповідати вимогам ДСТУ 2189–93 та ГОСТ 12.2.019–76, щоб їх міг обслуговувати один тракторист. Витрати праці мають становити не більше 0,80 люд·год/га за річного завантаження 160 годин. Термін експлуатації машин — 8 років. У машин повинен бути бункер, щоб можна було продовжувати збирання коренеплодів під час заміни транспортних засобів, вона має піддаватися переобладнанню для збирання маточних коренеплодів, у ній повинні просто замінятися робочі органи, проводитись ТО та ремонт.
За двофазного збирання, крім гичкозбиральної та бурякозбиральної машин, може додатково використовуватися третя окрема машина — доочищувач головок коренеплодів для додаткового інтенсивнішого очищення головок коренеплодів від решток гички та видалення рослинних решток із зони рядків або з усієї зони проходження гичкозбиральної машини до збирання коренеплодів коренезбиральною машиною. Доочищувачі головок коренеплодів повинні відповідати таким вимогам.
Робоча швидкість доочищувачів має бути не менше 6,0 км/год, транспортна — близько 20 км/год. Продуктивність за годину основного часу — не менше 1,62 га. Коефіцієнт надійності виконання технологічного процесу — не менше 0,98, коефіцієнт використання змінного часу — не менше 0,80. Маса гички з коренеплодами, що залишилися після доочищення, не повинна перевищувати 0,5%. Ступінь доочищення коренеплодів — не менше 30%. Кількість вибитих із рядків коренеплодів — не більше 0,1%. Питома витрата палива — не більше 8,0 кг/га. Напрацювання на відмову — не менше 60 год основного часу. Коефіцієнт готовності за оперативним часом — не менше 0,98. Питома сумарна оперативна трудомісткість усунення відмов — не більше 0,04 люд·год/год. Середньозмінний оперативний час ТО — не більше 0,20 год. Питома сумарна оперативна трудомісткість ТО — не більше 0,04 люд·год/год. Питома конструкційна маса на виконанні технологічної операції — не більше 300 кг/м. Питома матеріаломісткість — не більше 620 кг/га/год. Оперативна трудомісткість переведення з транспортного положення в робоче і навпаки — не більше 0,10 люд·год. Дорожній просвіт — не менше 300 мм. Очищувачі головок коренеплодів повинні відповідати вимогам ДСТУ 2189–93, щоб їх міг обслуговувати один тракторист. Витрати праці не повинні перевищувати 0,77 люд·год/га за річного завантаження 160 год. Термін експлуатації машин — 8 років. Доочищувачі повинні обладнуватись автоматичною системою навішування на енергетичний засіб.
В Україні доочищувачі головок коренеплодів серійно виробляють на ВАТ “ТеКЗ”.
Трифазне збирання здійснюють три окремі машини: гичкозбиральна, копач-валкоукладач та підбирач-навантажувач. Це все здійснюється за валковою технологією. Для збирання гички за трифазного збирання використовують серійні машини — МБП-6 та БМ-6Б.1
Для викопування коренеплодів і укладання їх у валки використовують копачі-валкоутворювачі КВЦБ-1,2 виробництва ВАТ “Борекс”, АЗК-6-02 виробництва ВАТ “Уманьферммаш” та аналогічні за призначенням машини іноземного виробництва, які повинні забезпечувати виконання технологічного процесу з такими техніко-експлуатаційними вимогами.
Копачі-валкоукладачі призначено для викопування коренеплодів, із яких попередньо зрізано гичку, для очищення та укладання їх на полі з дальшим навантаженням у транспортні засоби.
Копачі-валкоукладачі обов’язково оснащують автоматичною системою навішування на енергетичний засіб, системою автоматичного контролю за виконанням технологічного процесу робочими органами, за обліком часу роботи та зібраної площі, за іншою інформацією із її збереженням і можливістю перенесення в комп’ютерну мережу.
Робоча швидкість машин для збирання цукрового буряку має бути не менше 6,0 км/год, транспортна — близько 20 км/год. Продуктивність за годину основного часу — не менше 1,62 га. Коефіцієнт надійності виконання технологічного процесу — не менше 0,98, коефіцієнт використання змінного часу — не менше 0,80. Копачі-валкоукладачі повинні забезпечувати 99% повноту збору коренеплодів. У купі зібраних коренеплодів домішок повинно бути не більше 10,0%, у тому числі рослинних решток — не більше 0,20%. Пошкоджених коренеплодів може бути не більше 6,0%, у тому числі сильно пошкоджених — не більше 2,0%. Коренеплоди вкладають у валок завширшки до 1 м. Питомі витрати палива мають становити не більше 9,0 кг/га. Напрацювання на відмову має бути не менше 60 годин основного часу, коефіцієнт готовності за оперативним часом — не менше 0,95. Питома сумарна оперативна трудомісткість усунення відмов — не більше 0,05 люд·год/год. Середньозмінний оперативний час ТО — не більше 0,25 години. Питома сумарна оперативна трудомісткість ТО — не більше 0,05 люд·год/год. Питома конструкційна маса на виконанні технологічної операції — не більше 600 кг/м. Питома матеріаломісткість — не більше 1200 кг/га /год ± 3%. Оперативна трудомісткість переведення з транспортного положення в робоче і навпаки — не більше 0,10 люд.год. Дорожній просвіт — не менше 300 мм. Копачі-валкоукладачі повинні відповідати вимогам ДСТУ 2189–93, їх має обслуговувати один тракторист. Витрати праці повинні становити не більше 0,77 люд·год/га за річного завантаження 160 годин. Термін експлуатації машин — 8 років. Машини мають бути забезпечені простою заміною робочих органів, проведенням ТО та ремонту.
Для підбирання коренеплодів цукрового буряку із валків, їх доочищення та навантаження в транспортні засоби використовують підбирачі-навантажувачі ПНБВ-1,6 виробництва ВАТ “Борекс”, АЗК-6-03 виробництва ВАТ “Уманьферммаш” та аналогічні за призначенням машини іноземного виробництва, які повинні забезпечувати виконання технологічного процесу з такими показниками якості.
Підбирачі-навантажувачі коренеплодів призначено для підбирання з польових валків коренеплодів, очищення й навантаження їх у транспортні засоби.
Підбирачі-навантажувачі коренеплодів оснащено системою автоматичного контролю за виконанням технологічного процесу робочими органами, за обліком часу роботи та зібраної площі, за іншою інформацією з її збереженням і можливістю перенесення в комп’ютерну мережу.
Робоча швидкість машин для збирання має бути не меншою за 7,0 км/год, транспортна — близько 20 км/год. Продуктивність за годину основного часу — не менше 1,90 га. Коефіцієнт надійності виконання технологічного процесу — не менше 0,98, коефіцієнт використання змінного часу — не менше 0,80. Підбирачі-навантажувачі повинні забезпечувати 99,5% збору коренеплодів. У купі зібраних коренеплодів домішок повинно бути не більше 5,0%, у тому числі рослинних решток — не більше 0,20%. Пошкоджених коренеплодів може бути не більше 4,0%, у тому числі сильно пошкоджених — не більше 1,0%. Питомі витрати палива мають становити не більше 6,0 кг/га. Напрацювання на відмову має бути не менше 60 годин основного часу, коефіцієнт готовності за оперативним часом — не менше 0,96. Питома сумарна оперативна трудомісткість усунення відмов — не більше 0,04 люд·год/год. Середньозмінний оперативний час ТО — не більше 0,20 години. Питома сумарна оперативна трудомісткість ТО — не більше 0,04 люд·год/год. Питома конструкційна маса на виконанні технологічної операції — не більше 980 кг/м. Питома матеріаломісткість — не більше 1700 кг/га/год ± 3%. Оперативна трудомісткість переводення з транспортного положення в робоче і навпаки — не більше 0,10 люд·год. Дорожній просвіт — не менше 300 мм. Копачі-валкоукладачі повинні відповідати вимогам ДСТУ 2189–93, їх має обслуговувати один тракторист. Витрати праці повинні становити не більше 0,67 люд·год/га за річного завантаження 160 годин. Термін експлуатації машин — 8 років. У машин мають бути: проста заміна робочих органів, проведення ТО та ремонту.
Для підбирання коренеплодів із польових валків і буртів, для їх доочищення й навантаження в транспортні засоби використовують буряконавантажувачі, які повинні забезпечувати таку якість роботи.
Буряконавантажувачі оснащено автоматичною системою контролю за виконанням та керуванням технологічним процесом робочими органами, за обліком часу роботи та за іншою інформацією з її збереженням і можливістю перенесення в комп’ютерну мережу.
Робоча швидкість буряконавантажувачів має бути 0,05–0,74 км/год, транспортна — близько 20 км/год. Продуктивність за годину основного часу — не менше 200 т. Коефіцієнт надійності виконання технологічного процесу — не менше 0,98, коефіцієнт використання змінного часу — не менше 0,75. Буряконавантажувачі повинні забезпечувати 99,5% підбору коренеплодів. У купі зібраних коренеплодів домішок має бути не більше 5,0%, у тому числі рослинних решток — не більше 0,10%. Ступінь доочищення коренеплодів має бути не менша 35%. Пошкоджених коренеплодів може бути не більше 5,0%, у тому числі сильно пошкоджених — не більше 2,0%. Питомі витрати палива повинні становити не більше 0,090 кг/т. Напрацювання на відмову має бути не менше 60 годин основного часу, коефіцієнт готовності за оперативним часом — не менше 0,96. Питома сумарна оперативна трудомісткість усунення відмов — не більше 0,06 люд·год/год. Середньозмінний оперативний час ТО — не більше 0,25 години. Питома сумарна оперативна трудомісткість ТО — не більше 0,06 люд·год/год. Питома матеріаломісткість — не більше 60 кг/т/год. Оперативна трудомісткість переведення з транспортного положення в робоче і навпаки — не більше 0,10 люд.год. Дорожній просвіт — не менше 300 мм. Буряконавантажувачі повинні відповідати вимогам ДСТУ 2189–93, ГОСТ 12.2.019, їх має обслуговувати один тракторист. Витрати праці повинні становити не більше 0,01 люд·год/т за річного завантаження 160 годин. Термін експлуатації машин для збирання цукрового буряку— 8 років. У буряконавантажувачів мають бути: проста заміна робочих органів, проведення ТО та ремонту.
Машини для збирання цукрового буряку. В Україні монопольно використовують самохідні очищувачі-навантажувачі СПС-4,2А виробництва КВП “ДКЗ”.
Якість виконання технологічного процесу машинами для збирання цукрових буряків великою мірою залежить від стану полів, на яких їх вирощують, та погодно-кліматичних умов на час збирання. Машини для збирання цукрових буряків повинні забезпечувати приведені техніко-технологічні вимоги до якості виконання технологічного процесу на полях, які мають бути такими.
Поздовжній схил поверхні поля — не більше 8 градусів, а схил упоперек рядків — не більше 2 градусів. Максимальна вологість грунту на час збирання в горизонті 0–10 см на важких грунтах може бути близько 27%, на середніх — близько 23, а на легких — близько 20%. Твердість грунту — близько 2,0 МПа. Ширина основних міжрядь — 45 ± 3 см, стикових — 44–49 см. Біологічна урожайність гички — не менше 25 т/га, висота гички — 25–100 см. Стан гички — конус-розетка. Біологічна урожайність коренеплодів — 20–70 т/га. Діаметр коренеплодів — 5–18 см. Висота головок коренеплодів щодо поверхні грунту — від -4 до +8 см. Мінімальна відстань між краями коренеплодів у суміжних рядках — 16 см. Маса бур’янів на 1 м2 — близько 0,05 кг. Кількість коренеплодів цукрового буряку на 1 м рядка — 3–6 шт. Допустиме відхилення осі коренеплодів від теоретичної лінії рядка на довжині 10 м — не більше 10 см. Маса розкиданої гички на 1 м2 — до 0,1 кг. Кількість необрізаної гички на коренеплодах після її зрізання — не більше 2,07%. Для підбирачів-навантажувачів — кількість коренеплодів на 1 м довжини валка — 20–40 шт., ширина валка — до 1,0 м. Для буряконавантажувачів — ширина валка не більше 4,0 м, висота — не більше 2,0 метрів, у купі зібраних коренеплодів має бути не менше 85%, домішок — не більше 15%, у тому числі рослинних решток — не більше 1,0%.
Отже, ринок техніки для збирання цукрових буряків різноманітний, насичений великою гамою як вітчизняних, так й імпортних машин. У господарств, що вирощують цукрові буряки, є можливість обрати спосіб збирання та підібрати потрібні машини. Наведені техніко-технологічні вимоги до машин для збирання цукрових буряків регламентуються державними стандартами та технічними умовами (ТУ) на виготовлення конкретної машини. Купуючи машину, згідно із Законом України “Про захист прав покупців сільськогосподарських машин” (ст. 7), покупець гарантовано одержує достовірну та своєчасну інформацію про машини, роботи, послуги, що гарантує компетентний вибір машини. У технічних умовах на випуск конкретної машини держава передбачила термін перевірки через державні випробувальні організації відповідності продукції нормативним вимогам. У машин, які виробляють серійно, зазвичай, якість перевіряють раз на два роки. На основі цієї перевірки машиновипробувальні організації складають протоколи державних випробувань із визначенням відповідності машини вимогам державних стандартів і вимог ТУ. Згідно з цим законом, покупець сільськогосподарської машини на його вимогу може ознайомитися з результатами державних випробувань. На основі матеріалів державних випробувань і наукових досліджень прогнозують і реально визначають економічні показники використання машин.
4. Узагальнення нових знань(4 хв)
Розкрити спектр думок по заданій темі
5. Домашнє завдання (1 хв)
Вивчити даний матеріал .Розширити свої знання по темі використавши матеріали інтернет ресурсів
1
-
 Дякую!
Дякую!

про публікацію авторської розробки
Додати розробку