Практична робота «Підбір електродвигуна по потужності».
МІНІСТЕРСТВО ОСВІТИ ТА НАУКИ УКРАЇНИ
Новоград-Волинський політехнічний фаховий коледж.
Методичні рекомендації до виконання практичної роботи по темі:
«Підбір електродвигуна по потужності».
НВПФК 2020р.
Укладач: Гичко А. В., викладач Новоград-Волинського промислово- економічного технікуму
Розроблена на підставі навчальної програми дисципліни, затвердженої директором Новоград-Волинського промислово-економічного технікуму
Розглянуто та схвалено
на засіданні циклової комісії
загально технічних та спеціальних дисциплін
Протокол № __
від« ___ » _________2020 р.
Голова циклової комісії ______________ Фютак О.С
Практична робота № 11
Тема: Підбір електродвигунів до приводів.
Мета роботи: Навчитись вибирати електродвигуни і визначати основні кінематичні характеристики приводів конвеєрів.
Теоретичне обгрунтування:
1.1 Кінематична схема привода.
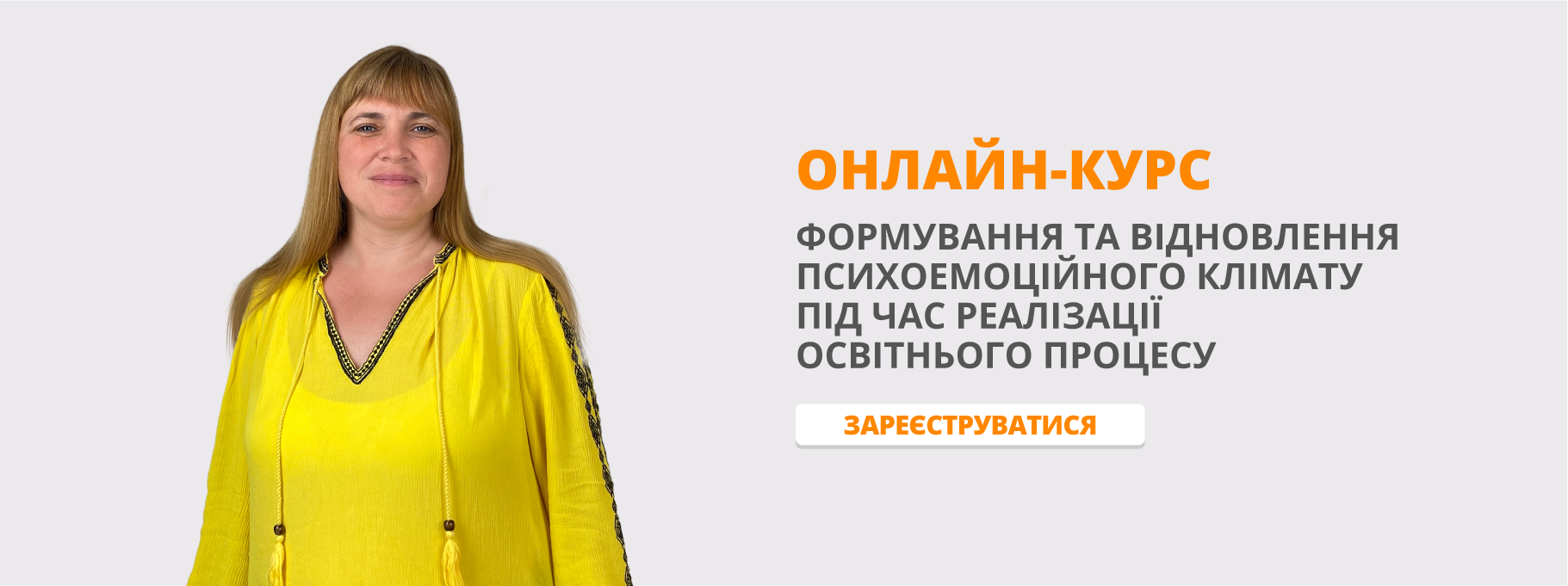
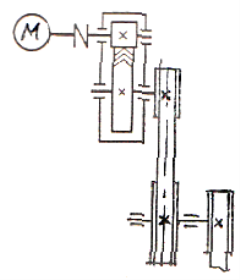
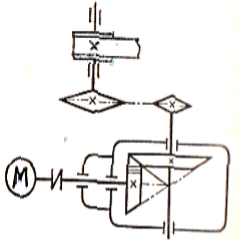
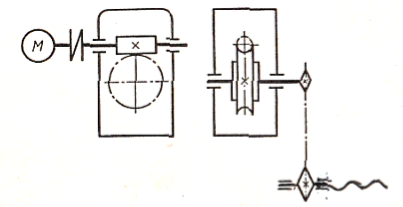
Кінематична схема виконується відповідно до виданого завдання із застосуванням прийнятих умовних позначень. На рис. 1.1 наведені приклади виконання кінематичних схем приводів. На кінематичній схемі необхідно вказати потужність електродвигуна та частоту обертання його вала. Ці параметри вказуються після вибору двигуна.
1.2. В завданні на проектування може бути задане тягове зусилля транспортера, конвеєра чи каната підйомника. Тоді необхідно визначити потужність на вихідному валі робочого органу (барабана транспортера чи барабана підйомника)
![]() (кВт), (1.1)
(кВт), (1.1)
де F – тягове зусилля транспортера (конвеєра, каната підйомника), (кН)
V – робоча швидкість транспортера (конвеєра, каната підйомника), (м/с).
В завданні може бути задане значення потужності на виході привода Рв.
1.3. Загальний коефіцієнт корисної дії привода
![]() , (1.2)
, (1.2)

а) б)
в)
г)
д)
Рис. 1.1. Кінематичні схеми: а) - привода транспортера, що складається з косозубого циліндричного редуктора і ланцюгової передачі; б) - привода транспортера, що складається з шеврон-ного редуктора і пасової передачі; в) - привода транспортера, що складається з конічного редуктора і ланцюгової передачі; г) - привода канатного підйомника, що складається з черв’ячного редуктора з нижнім розташуванням черв’яка і ланцюгової пере-дачі; д) - привода гвинтового транспортера, що складається з черв’ячного редуктора з верхнім розташуванням черв’яка і ланцюгової передачі.
де η1 – ККД з’єднувальної муфти,
η2 – ККД зубчастої або черв’ячної передачі,
η3 – ККД пасової чи ланцюгової передачі,
η4 – ККД пари підшипників (у нашому випадку привід має 3 пари підшипників).
Значення ККД окремих елементів приводу можна прийняти за рекомендаціями таблиці Д1.
Оскільки ККД черв’ячної передачі залежить від число заходів черв’яка, то необхідно прийняти орієнтовне число заходів. Число заходів z1 призначається залежно від передаточного числа черв’яч-ної передачі. Рекомендується: z1 = 4 при uр = 8÷15; z1 = 2 при uр = 15÷30; z1 = 1 при uр = >30. Застосування однозахідних черв’яків без крайньої необхідності не рекомендується.
1.4. Необхідна потужність електродвигуна
![]() (кВт) (1.3)
(кВт) (1.3)
1.5. Частота обертання вала робочого органа
![]() (об/хв.), (1.4)
(об/хв.), (1.4)
де Dб – діаметр барабана транспортера (м).
Якщо в завданні вказана кутова швидкість робочого органа, то частота обертання на виході приводу визначається за формулою:
![]() (1.5)
(1.5)
1.6. Орієнтовне передаточне число привода. Для визначення орієнтовного передаточного числа привода необхідно прийняти передаточні числа окремих передач привода. При цьому можна використати рекомендації таблиці Д2 (с. 107).
![]() (1.6)
(1.6)
де u1 та u2 – орієнтовні передаточні числа редуктора і ланцюгової чи пасової передачі.
1.7. Необхідне число обертів вала електродвигуна
![]() (1.7)
(1.7)
1.8. За визначеними необхідними потужністю та числом обертів потрібно вибрати асинхронний електродвигун. Можна використати таблицю Д17. Для приводів рекомендуються електродвигуни з синхронною частотою 1000 та 1500 об/хв. Перевантаження асинхронних електродвигунів не може перевищувати 8 %. Необхідно вказати марку прийнятого електродвигуна, його потужність та асинхронну частоту обертання.
1.9. Дійсне передаточне число привода
![]() , (1.8)
, (1.8)
де n1 – число обертів ведучого вала привода, тобто число обертів вала електродвигуна.
1.10.Необхідно прийняти передаточне число редуктора uр із рекомендованих по стандарту.
Циліндричні і конічні редуктори
1-й ряд: 1; 1,25; 1,6; 2,0; 2,5; 3,15; 4,0; 5,0; 6,3; 8,0; 10,0; 12,5.
2-й ряд: 1,12; 1,4; 1,8; 2,24; 2,8; 3,55; 4,5; 5,6; 7,1; 9,0; 11,2.
Черв’ячні редуктори
1-й ряд: 8; 10; 12,5; 16; 20; 25; 31,5; 40; 50; 63; 80.
2-й ряд: 9; 11,2; 14; 18; 22,4; 28; 35,5; 45; 56; 71.
Переважаючим є перший ряд.
1.11. Передаточне число ланцюгової чи пасової передачі
 (1.9)
(1.9)
1.12. Кутова швидкість ведучого вала привода
 (рад/с) (1.10)
(рад/с) (1.10)
1.13. Обертовий момент на ведучому валі редуктора
 (Н·м) (1.11)
(Н·м) (1.11)
Потужність Р1 = Рдв (необхідна потужність електродвигуна) підставляти у Вт.
1.14. Обертовий момент на веденому валі редуктора
![]() (Н·м) (1.12)
(Н·м) (1.12)
Приклад виконання: Підібрати електродвигун до привода транспортера, який складається з шевронного циліндричного редуктора і пасової передачі. Редуктор нереверсивний для тривалої роботи.
Тягове зусилля на канаті F = 8,4кН
Робоча швидкість підйомника V = 2,0м/с
Діаметр канатного барабана D = 350мм
Кут нахилу(ланцюгової) пасової передачі γ = 0º
Характер роботи приводу – спокійний.
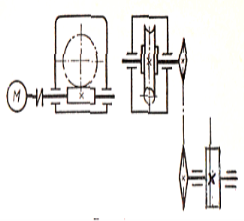
1.1. Кінематична схема привода.

Рис. 1.1. Кінематична схема привода транспортера, що складається з шевронного редуктора і пасової передачі
1.2. Визначити потужність на вихідному валу барабана транспортера:
![]() (кВт),
(кВт),
де F – тягове зусилля транспортера, (кН)
V – робоча швидкість транспортера, (м/с).
1.3. Загальний коефіцієнт корисної дії привода:
![]() =0.98·0.98·0.96·0.993 =0.98
=0.98·0.98·0.96·0.993 =0.98
де η1 – ККД з’єднувальної муфти (табл. Д1).
η2 – ККД зубчастої або черв’ячної передачі (табл. Д1).
η3 – ККД пасової чи ланцюгової передачі (табл. Д1).
η4 – ККД пари підшипників (табл. Д1).
1.4. Необхідна потужність електродвигуна:
![]()
1.5. Частота обертання вала робочого органа:
![]()
де Dб – діаметр барабана транспортера (м).
1.6. Орієнтовне передаточне число привода.
![]()
де u1 та u2 – орієнтовні передаточні числа редуктора і ланцюгової чи пасової передачі.
1.7. Необхідне число обертів вала електродвигуна
![]()
1.8 Приймаю електродвигун АИР 180S4/1462 для якого
Р = 22 Квт, n = 1462 об/хв (табл. Д3).
1.9. Дійсне передаточне число привода
![]()
де n1 – число обертів ведучого вала привода, тобто число обертів вала електродвигуна.
1.10. Прийняти передаточне число редуктора uр = 4 (табл. Д2).
1.11. Передаточне число ланцюгової чи пасової передачі:
![]()
1.12. Кутова швидкість ведучого вала привода:
![]()
1.13. Обертовий момент на ведучому валі редуктора:
![]()
1.14. Обертовий момент на веденому валі редуктора:
![]()
Завдання: Підібрати електродвигун до привода транспортера, який складається з шевронного циліндричного редуктора і пасової передачі. Редуктор нереверсивний для тривалої роботи.
Тягове зусилля на канаті F = ______ кН
Робоча швидкість підйомника V = ______ м/с
Діаметр канатного барабана D = ______ мм
Кут нахилу(ланцюгової) пасової передачі γ = ____º
Характер роботи приводу – _______________
Таблиця 1 Дані для розрахунку.
|
№ п/п |
Параметри приводу |
||||
|
Тягове зусилля транспортера F, кН |
Робоча швидкість транспортера V, м/с |
Діаметр барабана транспортера D, мм |
Кут нахилу передачі, γº |
Характер роботи привода |
|
|
1 |
6,0 |
3,5 |
500 |
0º |
спокійний |
|
2 |
4,0 |
3,7 |
600 |
30º |
з поштовхами |
|
3 |
4,2 |
3,3 |
400 |
45º |
з ударами |
|
4 |
3,9 |
5,5 |
500 |
60º |
спокійний |
|
5 |
3,1 |
8,0 |
500 |
90º |
з поштовхами |
|
6 |
3,3 |
8,6 |
600 |
0º |
з ударами |
|
7 |
6,1 |
4,0 |
450 |
30º |
спокійний |
|
8 |
8,8 |
2,3 |
360 |
45º |
з поштовхами |
|
9 |
6,1 |
2,8 |
550 |
60º |
з ударами |
|
10 |
4,0 |
3,0 |
300 |
90º |
спокійний |
|
11 |
3,8 |
4,3 |
400 |
90º |
з поштовхами |
|
12 |
7,8 |
3,2 |
350 |
30º |
з ударами |
|
13 |
6,5 |
3,0 |
300 |
45º |
спокійний |
|
14 |
6,2 |
4,0 |
250 |
60º |
з поштовхами |
|
15 |
5,8 |
3,8 |
420 |
0º |
з ударами |
|
16 |
6,0 |
3,4 |
500 |
0º |
спокійний |
|
17 |
4,0 |
3,4 |
600 |
30º |
з поштовхами |
|
18 |
4,2 |
3,2 |
400 |
45º |
з ударами |
|
19 |
3,9 |
5,4 |
500 |
60º |
спокійний |
|
20 |
3,1 |
7,8 |
500 |
90º |
з поштовхами |
|
21 |
3,3 |
7,5 |
600 |
0º |
з ударами |
|
22 |
6,1 |
3,9 |
450 |
30º |
спокійний |
|
23 |
8,4 |
2,9 |
350 |
45º |
з поштовхами |
|
24 |
6,1 |
2,7 |
550 |
60º |
з ударами |
|
25 |
4,0 |
3,9 |
300 |
90º |
спокійний |
|
26 |
3,8 |
4,2 |
400 |
90º |
з поштовхами |
|
27 |
6,8 |
3,1 |
350 |
30º |
з ударами |
|
28 |
7,5 |
2,9 |
300 |
45º |
спокійний |
|
29 |
3,2 |
7,9 |
250 |
60º |
з поштовхами |
|
30 |
5,8 |
3,7 |
420 |
0º |
з ударами |
ДОДАТОК
Таблиця Д1 Значення коефіцієнта корисної дії елементів привода
|
№ |
Механічні передачі і підшипники кочення |
ККД |
|
1
2 3
4 5 6 7 8 |
Зубчаста передача в редукторі:
Відкрита зубчаста передача Черв’ячна передача в редукторі при числі заходів черв’яка - z1 = 1 - z1 = 2 - z1 = 4 Відкрита ланцюгова передача Плоскопасова передача Клинопасова передача З’єднувальна муфта Підшипники кочення (одна пара) |
0,97…0,98 0,96…0,97 0,95…0,96
0,70…0,75 0,80…0,85 0,85…0,95 0,90…0,95 0,96…0,98 0,95…0,97 0,98 0,99 |
Таблиця Д2 Рекомендовані значення передаточних чисел механічних передач
|
№ |
Механічні передачі |
Передаточні числа |
|
1 2 3 4 5 |
Зубчаста циліндрична Зубчаста конічна Черв’ячна Ланцюгова Пасова |
2,0…6,3 1,0…4,0 8,0…80,0 1,5…4,0 2,0…4,0 |
Таблиця Д3 Технічні дані асинхронних електродвигунів серії АИР (тип, асинхронна частота обертання, об/хв.)
|
Потужність Р, кВт |
Синхронна частота |
|||
|
3000 |
1500 |
1000 |
750 |
|
|
0,55 0,75 1,1 1,5 2,2 3 4 5,5 7,5 11 15 18,5 22 30 |
- 71А2/2820 71В2/2805 80А2/2850 80В2/2850 90L2/2850 100S2/2850 100L2/2850 112M2/2895 132M2/2910 160S2/2910 160M2/2910 180S2/2919 180M2/2925 |
71A4/1357 71B4/1350 80A4/1395 80B4/1395 90L4/1395 100S4/1410 100L4/1410 112M4/1432 132S4/1440 132M4/1447 160S4/1455 160M4/1455 180S4/1462 180M4/1470 |
71B6/915 80A6/920 80B6/920 90L6/925 100L6/945 112MA6/950 112MB6/950 132S6/960 132M6/960 160S6/970 160M6/970 180M6/980 - - |
- 90LA8/695 90LB8/695 100L8/702 112MA8/709 112MB8/709 132S8/716 132M8/712 160S8/727 160M8/727 180M8/731 - - - |
Приклад позначення електродвигуна: Електродвигун АИР 100S4.
Контрольні запитання:
1. Як визначити потужність на вихідному валу робочого органу (барабана транспортера чи барабана підйомника)?
2. Як обрахувати загальний коефіцієнт корисної дії привода?
3. Як визначити необхідне число обертів вала електродвигуна?
4. Як визначити потрібну потужність двигуна?
5. Яким чином обрахувати обертовий момент на ведучому та веденому валу редуктора?
Рекомендовані джерела інформації
1. Середюк В. С. Курсове проектування деталей машин, методичні рекомендації, НОВОград, 2017.
2. Анурьев В.И. Справочник конструктора-машиностроителя. Т. 1. М. Машиностроение, 2001.
3. Дунаев П.Ф., Леликов О.П. Детали машин. Курсовое проекти-рование. М. Высшая школа, 1990.
4. Чернавский С.А., Боков К.Н., Чернин И.М. и др. Курсовое проектирование деталей машин. М. Машиностроение, 1988.
5. Пекарский Б.Г. Методические рекомендации по курсовому проектированию деталей машин с применением программи-руемых калькуляторов. К. РНМК по ССО, 1988.
6. Устюгов І.І. Деталі машин. К. Вища школа, 1984.
7. Цехнович Л.И., Петриченко И.П. Атлас конструкций редукто-ров. М. Высшая школа, 1990.
8. Маркель І.І. Деталі машин. К. Алерта, 2005.

про публікацію авторської розробки
Додати розробку