Презентація на тему" Реле часу"

Програмні пристрої та реле часу. Викладач Хоменко В. В.style.colorfillcolorstroke.colorfill.type

ПРОГРАМНІ ПРИСТРОЇ, ЗАДАВАЧІ ТА ЕЛЕМЕНТИ ПОРІВНЯННЯ1. Програмні пристрої та реле часу.2. Задавачі.3. Елементи порівняння
1. Програмні пристрої і реле часу. Для автоматизації вмикання, вимикання автоматизованих установок у певній послідовності за часом, використовують різні програмні пристрої та реле часу. Програмні пристрої відрізняються між собою в основному видом приводного механізму: електричні з синхронним мікродвигуном; годинникові з ручним заводом пружини; годинникові з автоматичним підзаводом пружини від мікродвигуна.
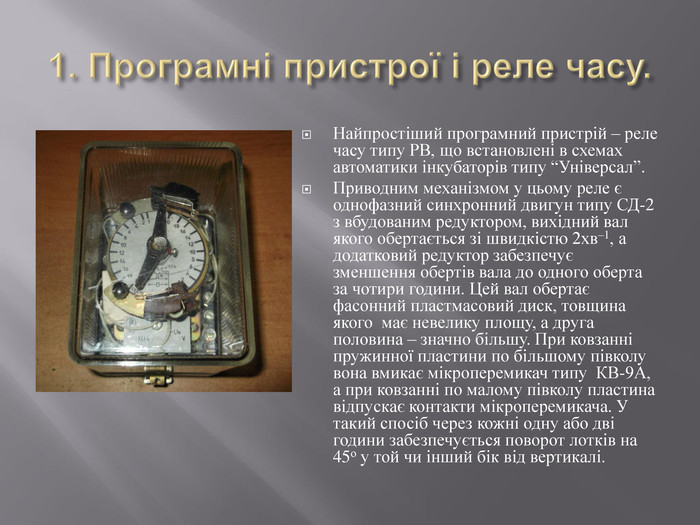
1. Програмні пристрої і реле часу. Найпростіший програмний пристрій – реле часу типу РВ, що встановлені в схемах автоматики інкубаторів типу “Універсал”. Приводним механізмом у цьому реле є однофазний синхронний двигун типу СД-2 з вбудованим редуктором, вихідний вал якого обертається зі швидкістю 2хв–1, а додатковий редуктор забезпечує зменшення обертів вала до одного оберта за чотири години. Цей вал обертає фасонний пластмасовий диск, товщина якого має невелику площу, а друга половина – значно більшу. При ковзанні пружинної пластини по більшому півколу вона вмикає мікроперемикач типу КВ-9 А, а при ковзанні по малому півколу пластина відпускає контакти мікроперемикача. У такий спосіб через кожні одну або дві години забезпечується поворот лотків на 45о у той чи інший бік від вертикалі.

Реле часу типу РВПриводним механізмом у цьому реле є однофазний синхронний двигун типу СД-2 з вбудованим редуктором, вихідний вал якого обертається зі швидкістю 2хв–1, а додатковий редуктор забезпечує зменшення обертів вала до одного оберта за чотири години. Цей вал обертає фасонний пластмасовий диск, товщина якого має невелику площу, а друга половина – значно більшу. При ковзанні пружинної пластини по більшому півколу вона вмикає мікроперемикач типу КВ-9 А, а при ковзанні по малому півколу пластина відпускає контакти мікроперемикача. У такий спосіб через кожні одну або дві години забезпечується поворот лотків на 45о у той чи інший бік від вертикалі.

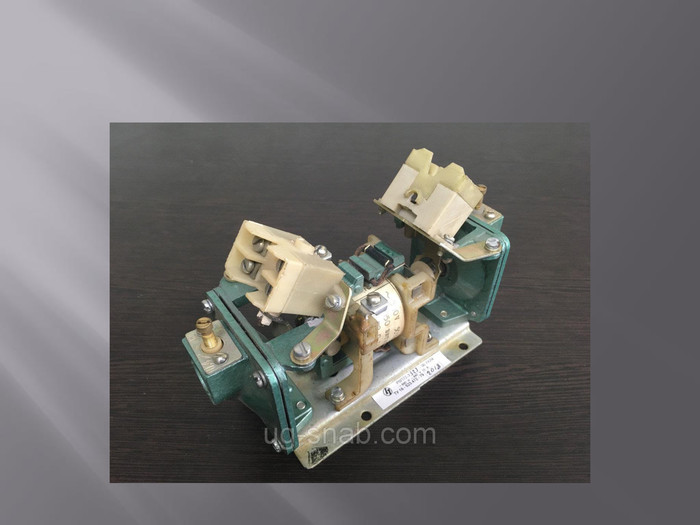
Програмне реле 2 РВМ Програмне реле 2 РВМ – електромеханічний прилад з анкерно-годинниковим механізмом з автоматичним підзаводом пружини від мікродвигуна, програмного диска, трьох мікроперемикачів і двох проміжних реле. Програмний диск обертається з швидкістю 1 оберт за добу. На диску є два концентрично розташовані різьбові отвори для штифтів (їх встановлюють згідно з програмою), які за допомогою важелів вмикають, вимикають мікроперемикачі кожної з програм, керуючи даними проміжного реле. (рис1) При розкручуванні пружини годинникового механізму третій мікроперемикач автоматично вмикає мікродвигун підзаводу, якого вистачає на добу. Похибка програм ±5 хв.
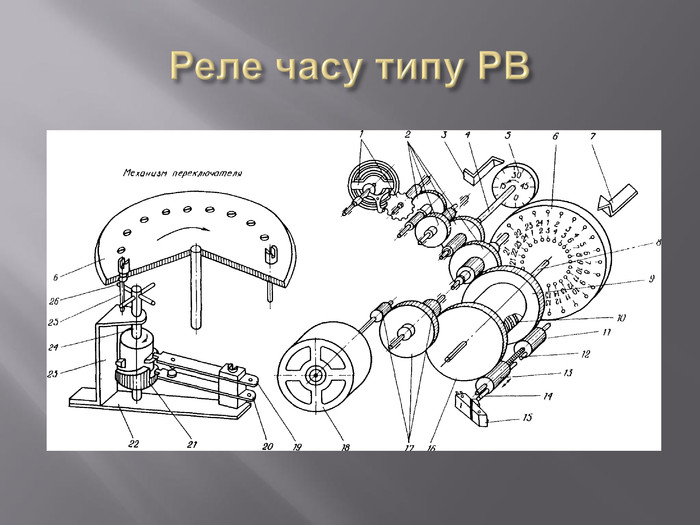
Реле часу типу РВ
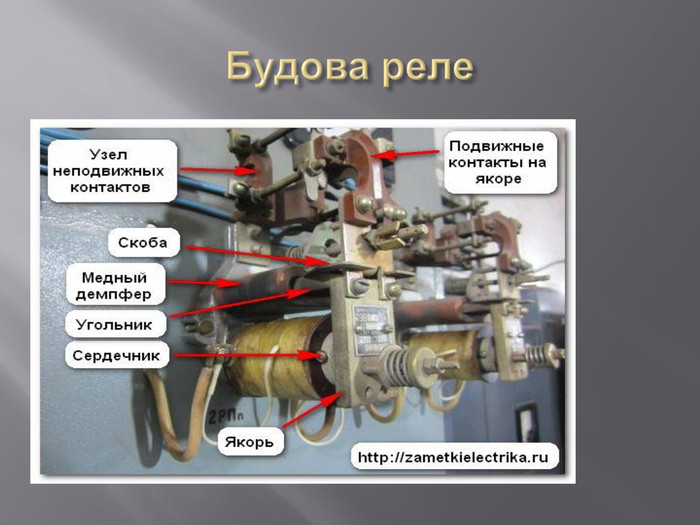
Будова реле


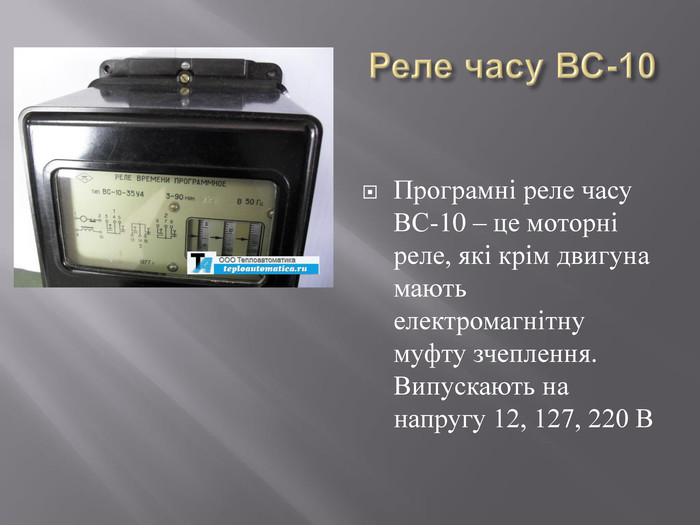
Реле часу ВС-10 Програмні реле часу ВС-10 – це моторні реле, які крім двигуна мають електромагнітну муфту зчеплення. Випускають на напругу 12, 127, 220 В




Реле часу(таймер) в розетціРозетка з таймером Feron TM 22


Реле часу(таймер)РВЦ-6-50 М1/РВЦМ для пральних машин. Реле часу(таймер)Р ВЦ-6-50 М1/РВЦМ для пральних машин Фея, Агат,Либідь,Иванна, Зирон
2. Задавачі. Під час автоматизації технологічних процесів система автоматики повинна або підтримувати контрольовані параметри на заданому рівні (системи стабілізації), або змінювати ці параметри за заздалегідь заданими функціями (програмні системи), або змінювати керовані параметри залежно від зміни попередньо невідомої величини на входах (системи слідкуючі). Для здійснення команд керування в цих системах використовують задавачі і елементи порівняння.
2. Задавачі. Задавачі системи автоматики служать для встановлення заданого значення, керованої (регульованої) величини або потрібного закону її зміни. Електричні аналогові задаючі пристрої неперервної дії – це потенціометри змінного опору, індуктивності з рухомим осердям, конденсатори змінної ємності, котушки магнітних підсилювачів тощо. Задане значення керованої величини встановлюють вручну або від програмних пристроїв. Закон формування заданого сигналу визначається відповідним профілем потенціометра, феромагнітного осердя, обкладок конденсатора тощо. Задавачі можуть бути аналогові (неперервні, дискретні) та цифрові.
2. Задавачі. Прикладом електромеханічних задаючих пристроїв неперервної дії можуть бути сельсини, а дискретної дії – програмні реле, крокові шукачі й інші, що використовуються в програмних системах керування. У гідравлічних, пневматичних задаючих пристроях задану величину встановлюють шляхом зміни сили протидіючої пружини, зміною положення засувок, зміною прохідних діаметрів сопел, золотників тощо.
2. Задавачі. Також як задаючі пристрої використовують електронні обчислювальні пристрої автоматики.
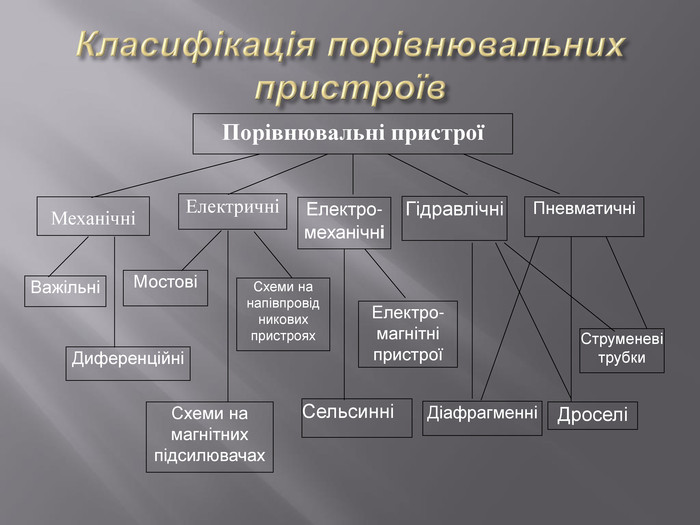
Класифікація порівнювальних пристроїв. Порівнювальні пристроїМеханічніЕлектричніЕлектро-механічні ГідравлічніПневматичніВажільніДиференційніМостовіСхеми на магнітних підсилювачах. Схеми на напівпровідникових пристроях. СельсинніЕлектро-магнітні пристроїДіафрагменніДроселіСтруменеві трубки
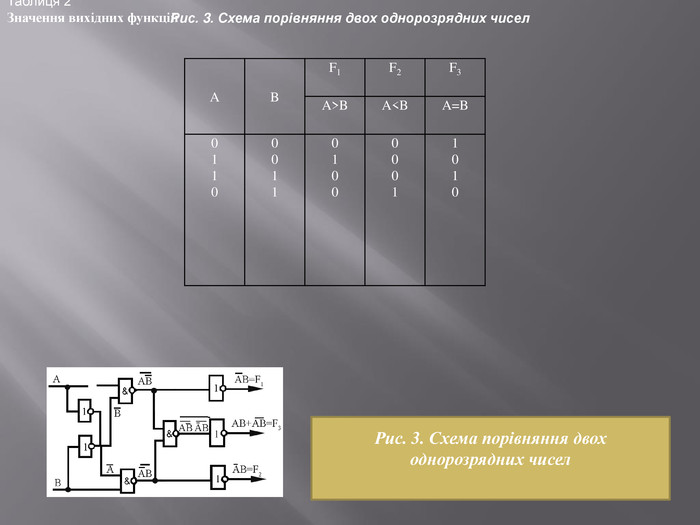
ABF1 F2 F3 A>BA
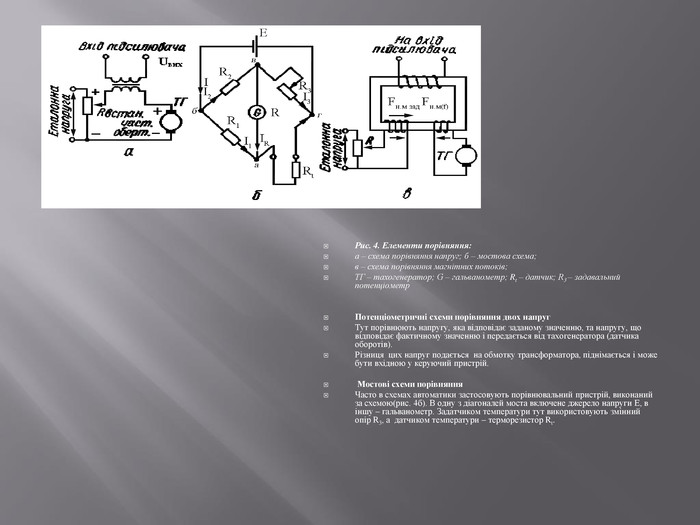
Рис. 4. Елементи порівняння: а – схема порівняння напруг; б – мостова схема; в – схема порівняння магнітних потоків; ТГ – тахогенератор; G – гальванометр; Rt – датчик; R3 – задавальний потенціометр. Потенціометричні схеми порівняння двох напруг. Тут порівнюють напругу, яка відповідає заданому значенню, та напругу, що відповідає фактичному значенню і передається від тахогенератора (датчика оборотів). Різниця цих напруг подається на обмотку трансформатора, піднімається і може бути вхідною у керуючий пристрій. Мостові схеми порівняння. Часто в схемах автоматики застосовують порівнювальний пристрій, виконаний за схемою(рис. 4б). В одну з діагоналей моста включене джерело напруги E, в іншу – гальванометр. Задатчиком температури тут використовують змінний опір R3, а датчиком температури – терморезистор Rt.
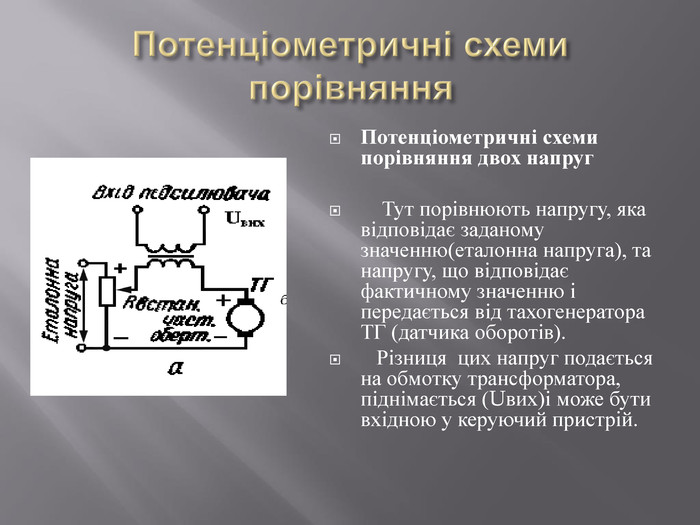
Потенціометричні схеми порівняння. Потенціометричні схеми порівняння двох напруг Тут порівнюють напругу, яка відповідає заданому значенню(еталонна напруга), та напругу, що відповідає фактичному значенню і передається від тахогенератора ТГ (датчика оборотів). Різниця цих напруг подається на обмотку трансформатора, піднімається (Uвих)і може бути вхідною у керуючий пристрій.
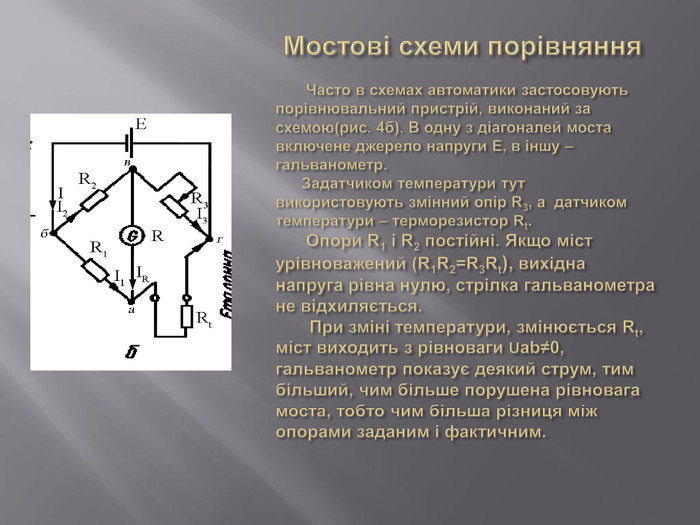
Мостові схеми порівняння Часто в схемах автоматики застосовують порівнювальний пристрій, виконаний за схемою(рис. 4б). В одну з діагоналей моста включене джерело напруги E, в іншу – гальванометр. Задатчиком температури тут використовують змінний опір R3, а датчиком температури – терморезистор Rt. Опори R1 і R2 постійні. Якщо міст урівноважений (R1 R2=R3 Rt), вихідна напруга рівна нулю, стрілка гальванометра не відхиляється. При зміні температури, змінюється Rt, міст виходить з рівноваги Uab≠0, гальванометр показує деякий струм, тим більший, чим більше порушена рівновага моста, тобто чим більша різниця між опорами заданим і фактичним.
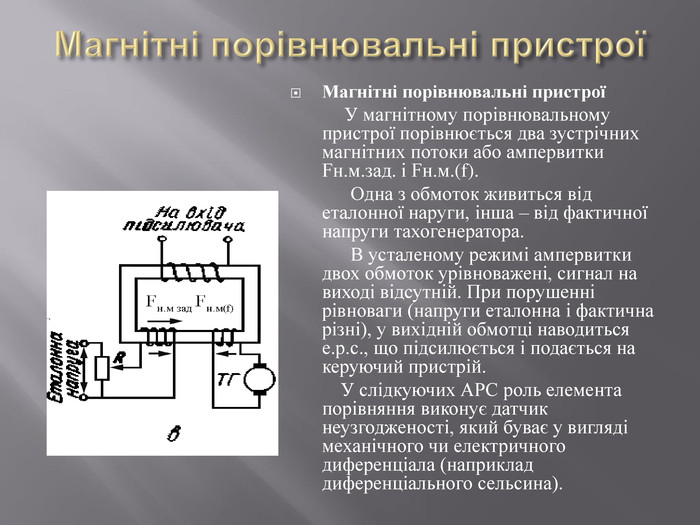
Магнітні порівнювальні пристроїМагнітні порівнювальні пристрої У магнітному порівнювальному пристрої порівнюється два зустрічних магнітних потоки або ампервитки Fн.м.зад. і Fн.м.(f). Одна з обмоток живиться від еталонної наруги, інша – від фактичної напруги тахогенератора. В усталеному режимі ампервитки двох обмоток урівноважені, сигнал на виході відсутній. При порушенні рівноваги (напруги еталонна і фактична різні), у вихідній обмотці наводиться е.р.с., що підсилюється і подається на керуючий пристрій. У слідкуючих АРС роль елемента порівняння виконує датчик неузгодженості, який буває у вигляді механічного чи електричного диференціала (наприклад диференціального сельсина).
Контрольні запитання 1. Призначення програмних пристроїв та які основні відмінності між ними?2. Будова, робота моторних програмних реле.3. Коротка характеристика, сфера застосування програмних приладів КА-24, ВС-10, РВ-4.4. Призначення задавачів систем автоматики, їх типи, приклади застосування.5. Призначення елементів порівняння в системах автоматики, їх типи.6. Як працюють електричні порівняльні пристрої (навести їхні принципові схеми)?7. Поняття про аналогові та цифрові порівняльні пристрої.8. Як працює магнітний порівняльний пристрій?

про публікацію авторської розробки
Додати розробку