Відкрите заняття. "Ультразвуковий сонар HC-SR04"
Відкрите заняття і гуртку «Онови робототехніки на платформі Arduino»
Дата заняття: «__» листопада 202_р.
 Тривалість: 3 год.
Тривалість: 3 год.
Тема. Ультразвуковий сонар HC-SR04.
Звук. Хвильова природа звуку. Довжина, частота, амплітуда звукових хвиль. Чутний та нечутний діапазони звуку. Інфразвук та ультразвук. Швидкість звуку. Звукові хвилі у різних середовищах. Ультразвук у природі, в техніці та повсякденному житті. Принцип роботи. ультразвукового сенсора відстані (сонара). Підключення сонара до плати Arduino UNO. Бібліотека основних функцій для роботи з сонаром
Практична частина. Виготовлення проекту з ультразвуковим сонаром (датчиком) HC-SR04 «Парктронік на Arduino»
Мета. Ознайомитись із принципами роботи ультразвукових датчиків, явищем поширення звуку та пристроями, що працюють на основі ехолокації.
Навчальна:
1. Забезпечити засвоєння знань про ехолокацію та методи застосування.
2. Узагальнити знання гуртківців про використання акустичних хвиль (звуку).
3. Продовжити формувати уявлення про способи та принципи сприйняття інформації про навколишнє середовище.
Розвиваюча:
1. Розвивати творчу активність, пізнавальні інтереси учнів.
2. Продовжити формувати вміння:
- працювати з датчиками набору Lego Mindstorms;
- розв’язувати поставлені задачі з допомогою наявних сенсорів;
- узагальнювати здобуті знання та навички, робити висновки.
3. Поглибити знання про звук, його використання, зокрема, для вирішення задач галузі робототехніки
Виховна:
- світоглядна (сприяти формуванню в гуртківців уявлення про способи сприйняття інформації з довкілля);
- екологічна (переконати гуртківців у доцільності використання неінвазивних методів дослідження об’єктів);
- профорієнтаційна (ознайомити учнів із професіями, пов’язаними з використанням ехолокації);
- етична (сприяти формуванню етичних взаємовідносин у колективі (доброзичливості, взаємодопомоги, справедливості);
- естетична (розвивати в гуртківців почуття прекрасного, ергономічності.
Практична частина заняття:
розглянути зовнішній вигляд, будову та принцип роботи ультразвукового сонара відстані; скласти електричне кола з ультразвуковим сонаром;
написання тестової програми, яка виводить інформацію з сонара у монітор порту. Розроблення програми, яка вмикає лампочку у випадку коли перешкода знаходиться ближче певної відстані.
Методи та прийоми:
- Інформативно-рецептивні:
- словесні (розповідь, бесіда, пояснення);
- наочні (демонстрація предметів, явищ);
- практичні (практична робота).
2. Репродуктивні (влаштування змагань по виготовленню пристроїв на макетних платах та з використанням плати Arduino UNO та датчика НС-NS04.
3. Пошукові ( творчий, групові форми роботи).
4. Навчально-дослідницькі (дослідницька робота, експеримент).
Тип заняття: комбіноване з використанням STEM-технологій.
S (science) – науковий підхід до вивчення. Дослідження.
T (technology) – вивчення технології функціонування парктроніка.
E (engineering) – конструювання парктроніка. Складання електронної схеми на макетній платі
М (maths) – програмування парктроніка. Обчислення відстані від парктроніка до перешкоди..
Форма заняття: групове та індивідуальне
Обладнання:
- дошка,
- набори конструктора Arduino,
- ноутбуки,
- проектор.
- Презентація проекту «Парктронік на Arduino».
План заняття:
Організаційна частина.
І. Вступна частина.
- Повідомлення теми та мети заняття.
- Актуалізація опорних знань та навичок.
- Мотивація навчальної діяльності.
ІІ. Основна частина.
-
Звук.
- Звуковий або чутний діапазон.
- Ультразвук.
- Інфразвук
- Швидкість звуку.
- Ультразвуковий далекомір (сонар) HC-SR04
ІІІ. Практична частина 1.
- Підключення HC-SR04 до Arduino.
- Програма (скетч) для роботи з датчиком HC-SR04 і виведенням результату вимірювань у Serial Monitor.
- Узагальнення і закріплення набутих знань.
- Застосування ультразвуку в медицині.
- Застосування ультразвуку в техніці.
- Цікаві факти про ультразвук.
- Шкідливий ультразвук
IV. Практична частина 2.
- Організаційна частина.
- Виконання практичної роботи.
- Очікувані результати.
- План роботи над проектом «Парктронік».
- Складання принципової електричної схеми парктроніка.
- Складання принципової схеми на макетній платі.
- Програмування проекту робота.
-
Програмування (написання програми або завантаження готового скетчу).
- Завантаження програми (скетчу) в мікроконтролер та експерименти.
- Як працює скетч.
- Заключна частина
Хід заняття
Організаційна частина
Перевірка присутніх за журналом.
Перевірка комплектності наборів «Arduino» для виконання роботи, роботи НБ.( до початку заняття).
- Вступна частина
- Повідомлення теми та мети заняття.
Очікувані результати: на кінець заняття має бути створено пристрій «Парктронік на Arduino». для встановлення граничної відстані від автомобіля до перешкоди із світловим та звуковим інформуванням водія під час його паркування.
- Актуалізація опорних знань: згадати про попередні заняття – де поставлені задачі вирішувались з допомогою датчика температури і вологості. Пояснити, що на даний момент ми зможемо простіше виконувати ті ж самі задачі та набагато складніші використавши бібліотеки Arduino.
Давайте пригадаємо:
- Що таке електричне коло? Його складові?
- Що таке Arduino?
- Які визнаєте плати Arduino?
- Які входи-виходи є на платі Arduino UNO?
- Яка відмінність між цифровим та аналоговим сигналами?
- Що таке низький та високий рівень вихідного (вхідного) сигналу для плати Arduino UNO?
- Як під’єднати світлодіод до вихідного сигналу з плати Arduino?
- Що таке бузер? Які бувають бузери?
- Щоб під’єднати плату Arduino UNO для виконання проектів в Arduino IDE необхідно….
- Як позначається коментар в програмі (скетчі) для Ардуно?
- Як відокремлюється кожний наступний рядок в програмі (в скетчі)?
- Що означають дві круглі дужки ()?
- Що означає частина програми void setup? void loop?
- Мотивація навчальної діяльності гуртківців: з розумінням та знаннями принципів роботи та програмування ультразвукового датчика з’являється можливість розв’язання багатьох повсякденних проблем: ехолот, УЗ – локатор - сканування внутрішніх органів людини; побудова 3D тіла людини;. ультразвуковий ліхтар для сліпих, ультра тростина…
ІІ. Основна частина.
![]() 1. Звук — коливальний рух частинок середовища, що поширюється у вигляді хвиль у газі, рідині чи твердому тілі та сприймається слухом. У вузькому значенні терміном звук визначають коливання, які сприймаються сенсорною системою тварин і людини. Органи слуху людини сприймають звуки у відносно вузькому частотному діапазоні. Слуховий апарат багатьох тварин сприймає звуки в значно ширшому інтервалі частот.
1. Звук — коливальний рух частинок середовища, що поширюється у вигляді хвиль у газі, рідині чи твердому тілі та сприймається слухом. У вузькому значенні терміном звук визначають коливання, які сприймаються сенсорною системою тварин і людини. Органи слуху людини сприймають звуки у відносно вузькому частотному діапазоні. Слуховий апарат багатьох тварин сприймає звуки в значно ширшому інтервалі частот.
При описі звукових полів використовують такі фізичні характеристики:
- частота,
- довжина хвилі,
- амплітуда,
- швидкість звуку,
- тиск та швидкість частинок середовища.
У зв'язку з особливістю руху частинок середовища при поширенні звукових хвиль цю швидкість називають коливальною швидкістю. Коли мова йде про сприйняття звуків людиною використовують так звані фізіологічні характеристики звуку:
Звичайно середньостатистична людина чує коливання, передані по повітрю, у діапазоні частот від 16—20 Гц до 15—20 кГц.
Представники тваринного світу здатні сприймати звуки в значно ширшому діапазоні частот. Кажани для орієнтації та знаходження здобичі використовують звуки в діапазоні 20-120 кГц. Дельфіни, наприклад, використовують для орієнтації та полювання звуки з частотою понад 100 кГц[5] Значно вищі 20 кГц частоти здатні сприймати і собаки.
1.1. Звуковий або чутний діапазон.
Діапазон від 16 Гц до 20 кГц називають чутним діапазоном., понад 20000 Гц — ультразвуком. Звуки з частотою 109−1013 Гц називають гіперзвуком.
1.2. Ультразвук
Частота коливань більша, ніж 20 тисяч Герц, називаються ультразвуком. Ультразвук широко використовується в техніці та медицині. Ультразвук справляє значну фізіологічну дію на живі організми. Маленькі рибки, пуголовки, інфузорії гинуть під дією ультразвукового випромінювання. А дія ультразвуку на деякі рослини стимулює їх розвиток, збільшує врожайність.
1.3. Інфразвук
Звуки з частотами до 16 Гц називаються інфразвуком.
Інфразвукові коливання небезпечні для організмів. Людина не чує цих коливань, але сприймає їх як неприємні відчуття. Інфразвукові коливання викликаються землетрусом або вібрацією важких механізмів. Можливо, ці коливання сприймають деякі тварини: відомо, що собаки та кішки перед землетрусом намагаються покинути приміщення. Багаторічні спостереження довели, що медузи перед штормом намагаються заховатися в небезпечне місце на великій глибині. Це пов’язано з тим, що медузи можуть сприймати інфразвуки, які поширюються у воді та з’являються за 10–15 годин до шторму.
2. Швидкість звуку — швидкість поширення звукових хвиль у середовищі.
Швидкість звуку в повітрі за нормальних умов становить 340 м/с. Вона дещо зростає з підвищенням температури і зменшується при її пониженні. Швидкість звуку в повітрі практично не залежить від частоти, тому звук розповсюджується на великі відстані без спотворень. В газах швидкість звуку складає декілька сотень метрів на секунду. Найвищу швидкість мають хвилі в водні (близько 1200 м/с). Для рідин швидкість звуку знаходиться в інтервалі 1-2 км/с. В прісній воді швидкість звуку близька до 1500 м/с. В більшості твердих пружних тіл швидкість звуку (поздовжніх хвиль) знаходиться в інтервалі 5-6 км/с.
3. Ультразвуковий далекомір (сонар) HC-SR04
 Отож, сьогодні познайомимось із роботою та використанням ультразвукового сенсора. і в новій версії EV3
Отож, сьогодні познайомимось із роботою та використанням ультразвукового сенсора. і в новій версії EV3
Працюють вони з а однаковим принципом, який базується на принципі ехолокації : Ехолокація — засіб виявлення розташування, розмір, структуру, природу об'єктів шляхом передачі акустичних або радіохвиль та аналізу хвиль, відбитих від об'єктів. На основі ехолокації працює низка приладів: радар (пошук і вимір відстаней між об'єктами), сонар (відстань до глибин), лідар, лазерний сканер, дефектоскоп. (Інформація з Вікіпедії).

Принцип роботи даних сенсорів.
 Показано, що об’єкт А (в даному випадку – кажан) випромінює ультразвукову хвилю, яка, поширюючись у просторі, відбивається від різних об’єктів В ( - метелика), та повертається назад до джерела. Кажан аналізує прийнятий сигнал і на основі сприйнятої інформації орієнтується в просторі.
Показано, що об’єкт А (в даному випадку – кажан) випромінює ультразвукову хвилю, яка, поширюючись у просторі, відбивається від різних об’єктів В ( - метелика), та повертається назад до джерела. Кажан аналізує прийнятий сигнал і на основі сприйнятої інформації орієнтується в просторі.
Ультразвуковий далекомір HC-SR04 призначений для вимірювання відстані від пристрою до об'єкта. Робота модуля ґрунтується на принципі ехолокації. Із одного із вікон випромінюється пакет ультразвукових хвиль. Він (пакет) поширюється в просторі, стикаючись і твердим об’єктом – відбивається і повертається до сенсора, але сприймає відбиту хвилю вже інше вікно на сенсорі. Вимірявши час між відправкою та отриманням імпульсу, не складно обчислити відстань до перешкоди. Оскільки в основі роботи пристрою використовується ультразвук, модуль погано підходить для визначення відстані до об'єктів звукопоглинання. Для ідеального вимірювання відстані поверхня об'єкта має бути рівною та гладкою.
ІІІ. Практична частина
Практична частина 1.
1. Підключення ультразвукового далекоміра до Arduino.
Схема підключення HC-SR04 до Arduino
 Підключення ультразвукового дальноміра (датчика) відстані HC-SR04 до Arduino досить просте.
Підключення ультразвукового дальноміра (датчика) відстані HC-SR04 до Arduino досить просте.
Модуль підключається чотирма проводами. Контакти VCC та GND служать для підключення живлення, а Trig та Echo-для відправлення та прийому сигналів далекоміра.
VCC – 5В
Trig – до одного з цифрових входів-виходів
Echo – іншого цифрового входу-виходу.
GND – Gnd
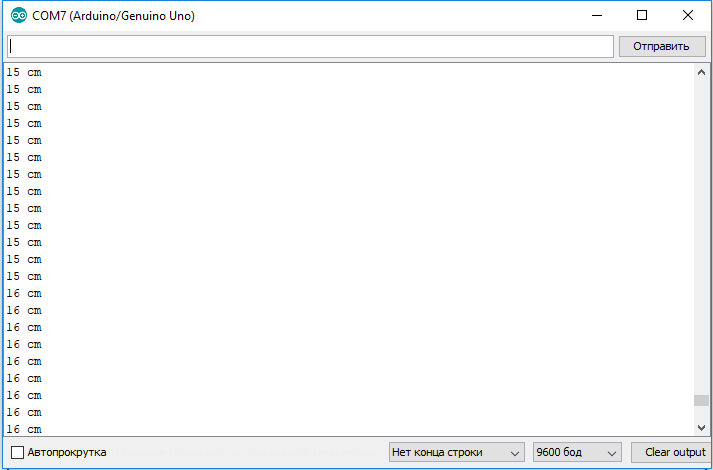
2. Програма (скетч) для роботи HC-SR04 з виведенням результату вимірювань у Serial Monitor ultrasonic.ino
// Вкажемо, що до яких пінів підключено
int trigPin = 12;
int echoPin = 13;
void setup()
{
Serial.begin (9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop()
{
int duration, distance; //внутр..тривалість, відстань
// для більшої точності встановимо значення LOW на піні Trig
digitalWrite(trigPin, LOW); //цифровий запис на триг. піні
delayMicroseconds(2);
// Тепер встановимо високий рівень на піні Trig
digitalWrite(trigPin, HIGH);
// Чекаємо 10 μs
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
 // Дізнаємося тривалість високого сигналу на піні Echo
// Дізнаємося тривалість високого сигналу на піні Echo
duration = pulseIn(echoPin, HIGH);// тривалість імпульсу
// Розрахуємо відстань
distance = duration/58;
// Виведемо значення у Serial Monitor
Serial.print(distance);
Serial.println("cm");
delay(100);
}
- Узагальнення і закріплення набутих знань.
Контрольні запитання
- На якому принципі заснована робота ультразвукового датчика?
- Дати характеристику ультразвуковому датчику відстані HC-SR04.
- Яку послідовність дій необхідно виконати для отримання даних з HC-SR04?
- Дати варіант схеми підключення датчика HC-SR04 до мікроконтролера Arduino UNO.
- Від яких факторів залежить точність датчика HC-SR04?
- До якого діапазону звукових коливань належить ультразвук?
- На якій частоті працює сонар HC-SR04?
- Назвіть сфери використання ультразвуку
- Як ультразвук використовується у військовій справі?
Що ви знаєте про ультразвук і медицину, біологію?
Отож, з проведеної вами роботи можна зробити висновки про використання даного датчика для різних задач, преваги та недоліки датчиків даного типу при вирішенні тієї чи іншої задачі.
- Одним з методів отримання інформації про навколишнє середовище є ультразвук.
- Використовуючи властивості ультразвуку працює ехолокація.
- Ультразвуковий датчик відстані, доцільно використовувати при виявленні твердих не вузьких об’єктів на відстані не більше 3,5 м.
- З допомогою даного датчика можна неінвазивним шляхом отримати інформацію про середовище, що надає переваги при небезпечних ситуаціях.
В загальному, ми сьогодні освоїли принцип роботи УЗ датчика, вивчили поняття ультразвуку та його використання в природі та техніці, а також, на реальному прикладі побачили як працює, недоліки та особливості роботи УЗ датчика. В загальному, ми сьогодні освоїли принцип роботи ультразвукового датчика – сонара HC-SR04, вивчили поняття ультразвуку та його використання в природі, техніці, медицині, а також, на реальному прикладі, створивши парктронік, побачили як він працює, побачили недоліки та особливості його роботи.
На наступному занятті ми поглибимо свої знання бібліотекою основних функцій для роботи з сонаром, вдосконалимо свої навички роботи з ультразвуковим датчиком – сонаром HC-SR04 та дисплеєм LCD 1602, створюючи радар, який буде сканувати навколишнє середовище та зображати профіль простору на дисплеї блоку.
- Застосування ультразвуку в медицині
Ультразвук використовується в таких галузях медицини, як діагностика, хірургія, фізіотерапія.
Найпоширеніше застосування хвильової ультразвукової технології – діагностичні УЗ сканери для візуалізації внутрішніх органів і структур.
Ультразвук знайшов своє застосування і в кардіології. Ехографія дозволяє побачити проблеми серця, його структури, оцінити розміри передсердь, шлуночків, міжшлуночкової перегородки, визначити товщину міокарда, шлуночків і стан клапанів, виявити в перикарді рідину.
- Застосування ультразвуку в техніці
На виробництві та в лабораторіях для очищення технічного посуду і деталей від малих часток застосовують ультразвукові ванни.
Властивості ультразвуку використовуються в ехолоті, спеціальному приладі, який визначає глибину моря.
Ехолот.
- Цікаві факти про ультразвук:
 Не так давно вчені виявили, що китайські жаби Amolops tormotus спілкуються між собою за допомогою ультразвуку. Летюча миша при полюванні сканує навколо себе простір серіями ультразвукових криків. Коли вона виявила свою жертву, то видає швидку серію сигналів для визначення місця розташування.
Не так давно вчені виявили, що китайські жаби Amolops tormotus спілкуються між собою за допомогою ультразвуку. Летюча миша при полюванні сканує навколо себе простір серіями ультразвукових криків. Коли вона виявила свою жертву, то видає швидку серію сигналів для визначення місця розташування.
- Шкідливий звук!
Тривала систематична дія ультразвуку, що поширюється повітряним шляхом, викликає зміни у нервовій, серцево-судинній і ендокринній системі, слуховому, больовому і вестибулярному аналізаторах, а також у процесах терморегуляції.
IV. Практична частина 2.
- Організаційна частина.
Перед тим як приступити до практичної частини нашого заняття зробимо:
перерву;
проведемо фізкультхвилинку. Оскільки робота на занятті буде пов’язана з дрібними деталями та роботою за комп’ютерами, пропоную виконати вправу для очей:
Після перерви та фізкультхвилинки повторимо:
- Правила БЖ при використанні електричних пристроїв із споживанням електричного струму від мережі 220В;
- Правила безпечного під’єднання плати Arduino до джерела живлення;
- Користування набором Arduino.
- Виконання практичної роботи.
Практична робота виконується колективно, групами та індивідуально за власними проектами.
Практичну частину заняття виконаємо з використанням STEM-технологій.
S (science) – науковий підхід до вивчення. Дослідження.
T (technology) – вивчення технології функціонування парктроніка.
E (engineering) – конструювання парктроніка. Складання електронної схеми на макетній платі
М (maths) – програмування парктроніка. Обчислення відстані від парктроніка до перешкоди..
- Очікувані результати.
Учні першого року навчання мають створити проект «Парктронік на базі плати ArduinоUNO»;
Учні старших років навчання продовжують роботу над власними та груповими проектами.
- План роботи над проектом «Парктронік».
Для виготовлення проекту нам необхідно:
- Змоделювати роботу парктроніка.
- Скласти принципову електричну схему парктроніка.
- Збирання принципової схеми на макетній платі та підключення її до плати Arduinо UNO;
- Програмування (написання програми або завантаження готового скетчу).
- Змоделюємо роботу парктроніка:
встановимо відстань > 30 см , як безпечну відстань (вмикаємо тільки зелений світлодіод);
>= 10 см – попереджувальна інформація (вмикаємо тільки жовтий світлодіод);
>10 см – небезпечна відстань (вмикаємо тільки червоний світлодіод);
>10 см (додатково для учнів старшої групи) – наближення до зіткнення з перешкодою (вмикаємо звукову інформацію від бузера).
- Складання електричної принципової схеми парктроніка.
red Led pin2 yellow Led pin3 green Led pin4 buzzer


+5В пін12 пін13 GND
- Складання на макетній платі принципової .
![]() Виберемо з набору «Arduino» необхідні елементи для складання принципової електричної схеми нашого проекту.
Виберемо з набору «Arduino» необхідні елементи для складання принципової електричної схеми нашого проекту.
- Плата Arduino
- Макетна плата
- Провідники папа-папа
-
Світлодіоди:
- червоний – 1 шт.;
- жовтий – 1 шт.;
- зелений – 1 шт.
- Ультразвуковий далекомір HC-SR04
- Резистори на 220 Ом – 3 шт.
1. Встановіть на макетній платі світлодіоди ( бажано в послідовності: зелений, жовтий, червоний).
2. Поруч із короткою ніжкою на шині кожного світлодіода (катод «-») встановіть по одному резистору, однією ніжкою на 220 Ом. Другі ніжки резисторів встановіть на шину «-»
3. Тепер встановіть ультразвуковий далекомір HC-SR04.
Дальномір підключається наступним чином: Vcc → 5V, Trig → 12, Echo → 13, Gnd → «земля».
4. Наша схема готова. Згідно з малюнком підключимо її до плати Arduino.

- Програмування проекту робота.
Наступним, заключним етапом роботи над проектом буде програмування нашого пристрою.. Під’єднуємо зібраний проект до ноутбука через USB кабель.
Заходимо на НБ в програму Arduino IDE.
Підключаємо плату Arduino до вказаного порту: меню «Інструменти» → «Порт» → вибрати порт із написом «Arduin Genuino Uno»
Написання програми або завантаження програми (готового скетчу).
Таким чином виконуючи послідовно всі операції маємо готовий пристрій – парктронік для убезпечення пошкодження транспортного засобу під час паркування та безпечного руху транспортного засобу заднім ходом.
Програмуємо у вікні програми ввівши наступний код..
Програма (скетч) проекту «Парктронік» розміщена у групі гуртка «Робототехніка » на Viber.
int trigPin = 12; // номер піна Trig
int echoPin = 13; // Номер піна Echo
int rLed = 2; // номер піна до якого підключено червоний LED
int yLed = 3; // номер піна до якого підключено жовтий LED
int gLed = 4; // номер піна до якого підключено синій LED
int buzzer = 11; // номер піна до якого підключений п'єзовипромінювач
void setup() {
// Налаштовуємо піни
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(gLed, OUTPUT);
pinMode(yLed, OUTPUT);
pinMode(rLed, OUTPUT);
pinMode(buzzer, OUTPUT);
}
void loop() {
int duration, distance;
// для більшої точності встановимо значення LOW на піні Trig
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// Тепер встановимо високий рівень на піні Trig
digitalWrite(trigPin, HIGH);
// Чекаємо 10 μs
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Дізнаємося тривалість високого сигналу на піні Echo
duration = pulseIn(echoPin, HIGH);
// Розрахуємо відстань
distance = duration/58;
if (distance > 30) { // Якщо відстань > 30 см то
digitalWrite(gLed, HIGH); // Вмикаємо тільки зелений LED
digitalWrite(yLed, LOW);
digitalWrite(rLed, LOW);
digitalWrite(buzzer, LOW);
}
else if (distance <= 30 && distance > 15) { // Відстань від 30 до 10см
digitalWrite(yLed, HIGH); // Вмикаємо лише жовтий LED
digitalWrite(gLed, LOW);
digitalWrite(rLed, LOW);
digitalWrite(buzzer, LOW);
}
else if (distance < 10) { // Відстань < 10 cм
digitalWrite(rLed, HIGH); // Вмикаємо лише червоний LED
digitalWrite(yLed, LOW);
digitalWrite(gLed, LOW);
digitalWrite(buzzer, HIGH); // Вмикаємо п'єзовипромінювач
}
delay(100); // Чекаємо 100 мілісекунд
}
5. Завантаження програми (скетчу) в мікроконтролер та експерименти.
1. Для завантаження скетчу в мікроконтролер натисніть кнопку «Завантаження»
2. Після успішного завантаження скетчу проведіть експеримент: встановіть навпроти далекоміра перешкоду, потім повільно наближайте перешкоду до пристрою і спостерігайте за послідовним включенням світлодіодів.
3. Вітаю із успішним завершенням практичної роботи по виготовленню проекту «Парк тронік на Arduino».
6. Як працює скетч.
Задаємо номери портів для випромінювання (trigPsn = 12) та прийому (EchoPin = 13) ультразвукового сигналу з ультразвукового далекомір HC-SR04.
Описуємо масив led[3] для зберігання номерів цифрових пінів до яких підключені світлодіоди (2,3,4) та ультразвуковий дальномір (11).
Нумерація елементів масиву мовою програмування Сі починається з нуля (0, 1, 2, 3, …), тому змінна циклу ініціалізується від 0 до 5.
Останній рядок Serial.begin(9600) у процедурі setup() служить для налаштування з'єднання обміну даними між платою Arduino та комп'ютером через USB-кабель.
Процедура void setup() виконується лише один раз під час підключення плати до мережі. У ній містяться початкові налаштування плати.
Друга складова нашої програми void loop () . Вона починає виконуватися відразу після процедури setup () і постійно повторюється, поки на плату подається струм.
Рядок dist = ultrasonic.Ranging (CM) зчитує показання далекоміра в сантиметрах і присвоює змінної dist.
Рядок Serial.println(dist) передає значення змінної dist на комп'ютер.
Функція digitalWrite(led[0],HIGH) подає напругу 5В порт led[0], якщо другий параметр HIGH, а за значення LOW – напруга 0В.
Наступні три рядки визначають послідовність увімкнення або відключення світлодіодів залежно від значення змінної t:
- Заключна частина.
Платформа Arduino дуже зручна та легка в використанні. Вона дає можливість навчатись основам робототехніки дітям з молодшого шкільного віку, та втілювати задумані проекти більш дорослим учням.
Увага!!! У мові програмування СІ регістр літер має значення.
Керівник гуртка-методист Б. Смичок
Бібліографія.
Інтернет ресурс - https://arduinomaster.ru/uroki-arduino/arduino-uroki-nachalo-raboty/
Інтернет ресурс - http://geekmatic.in.ua/ua/arduino_osnovyi_programmirovaniya

про публікацію авторської розробки
Додати розробку