Лекція "Основні поняття кінематики. Кінематична точка. Види руху точки в залежності від швидкості та прискорення. Просторі рухи твердого тіла. Сила інерції. Метод кінетостатики"
Лекція з дисципліни
«Технічна механіка»
273 Залізничний транспорт
Галузь знань 27 «Транспорт»
освітньо-кваліфікаційний рівень молодший спеціаліст
для студентів заочної форми навчання
Дисципліна: Технічна механіка
Блок МПН.08.01 Види напруженого стану деталей
Модуль ПФ.С.ОЗ.Р.03.10-2 Види напруженого стану деталей (Кінематика та динаміка)
Тема: Основні поняття кінематики. Кінематична точка. Види руху точки в залежності від швидкості та прискорення. Просторі рухи твердого тіла. Сила інерції. Метод кінетостатики.
План лекції:
1 Основні поняття кінематики.
2 Кінематика твердого тіла
Основні поняття кінематики. Кінематика точки.
Основним завданням кінематики є вивчення загальних законів руху матеріальних точок і твердих тіл без урахування причин, що їх викликають. Кінематика відповідає на питання: як рухається тіло.
1 Механічний рух - це зміна покладено ід тіла в просторі відносно інших тіл з плином часу.
Будь-яке механічне рух характеризується наступними параметрами:
• Траєкторія руху - це лінія, уздовж якої рухається тіло. В залежно від траєкторії рух може бути прямолінійним і криволінійним
• Шлях s - це відстань, пройдену тілом уздовж лінії траєкторії (рисунок 1)
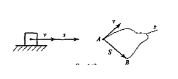
Рисунок 1 –Механічний рух
• Переміщення S- це спрямований відрізок прямої, що сполучає початкове і кінцеве положення тіла ( рисунок 1).
• Швидкість v - це величина, що характеризує швидкість зміни пройденого шляху за одиницю часу (похідна d шляху по часу):
V = ds/ dt, м/с , Vcр = S/t
• Дотичне прискорення аτ це величина, яка характеризує швидкість зміни
величини швидкості за одиницю часу:
аτ = dv/dt, м/с², аτ= v-v0/t
Дотичне прискорення завжди спрямоване по лінії вектора швидкості (рисунок 2)
•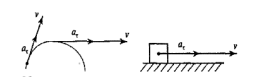
Рисунок 2-Дотичне прикосання
Нормальне прискорення аn - це величина, яка характеризує зміну напрямку вектора швидкості:
аn =v² /r
де р- радіус кривизни траєкторії.
Нормальне прискорення завжди спрямоване по радіусу до центру кривизни траєкторії (рисунок 3).

Рисунок 3-Нормальне прикосання
Види руху точки в залежності від прискорення:
1) рівномірний - це рух точки з постійною за величиною швидкістю. характеризується
наступними величинами:
v —s/t - const; s = vl; aτ = 0; аn = v² /r
2) рівноперемінне (рівноускорене, рівнозамідленне) - це рух точки з постійним
дотичним прискоренням. Характеризується такими величинами :
/ aτ/ = const; аτ= v-v0/t; аn = v² /r; v= v0+ аτ · t; s = v0 t+ aτ t²/2; s = v²- v0 /2 аτ
Кінематика твердого тіла
1 Найпростіші рухи твердого тіла
До простих рухів твердого тіла відноситься поступальний і обертальний рух.
Поступальний рух твердого тіла - це такий рух, при якому пряма, проведена в тілі між будь-якими двома точками, переміщається паралельно самій собі.
При поступальному русі всі точки тіла мають однакові швидкості, однакові прискорення і проходять однакові відрізки шляху (рисунок 4).
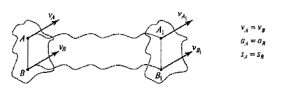
Рисунок 4-Поступальний рух
Робота більшості машин і механізмів заснована на обертальному русі.
2 Обертальним рухом твердого тіла навколо нерухомої осі називається такий рух, при якому всі точки тіла рухаються по колах, які лежать в площинах, перпендикулярних осі обертання, з центрами на цій осі.
Будь-яке обертальний рух характеризується наступними параметрами (рисунок 5):

Рисунок 5-Обертальний рух
- φ , рад- кут повороту, або кутове переміщення ( 1 рад= 57,3˚);
2)ω= φ/ t - кутова швидкість (характеризує зміну вугілля повороту за одиницю часу).
Середня кутова швидкість
ω ср = φ/ t
Кутове прискорення - це величина, яка характеризує зміну кутової швидкості за
одиницю часу:
ε = (ω – ω0 )/ t
Види обертального руху твердого тіла в залежності від прискорення:
1) рівномірний - це рух тіла з постійною кутовою швидкістю:
ω= φ/ t = const, φ = ω t, ε =0
Лінійні швидкості і прискорення точок рівномірно обертового тіла (рисунок 6) визначається за формулою
V = ω r, аτ=0, аn = ω ² r
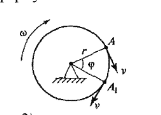
Рисунок 6- Обертальний рух
2) рівноперемене - це рух з постійним кутовим прискоренням:
ε = (ω – ω0 )/ t = const;
φ = ωи t+ ε t² / 2
ω= ωи + ε t
Контрольні питання:
1 Дати пояснення механічному руху.
2 Назвати найпростіші рухи твердого тіла
3 Дати пояснення обертальному руху твердого тіла
4 Види обертального руху твердого тіла
Література:
1М.С. Мовнин, А.Б. Йзраелит, А.Г. Рубашкін «Основи технічної механіки», с 134-153

про публікацію авторської розробки
Додати розробку