Лекційний матеріал до теми "Кінематика машинних агрегатів"
Лекція з дисципліни «Експлуатація машин і обладнання»
Розробив викладач Лоїк Р.П.
Кінематика машинних агрегатів
План заняття
- Характеристика робочої ділянки.
- Кінематичні характеристики машинних агрегатів.
- Технологія поворотів.
- Основні способи руху.
- Коефіцієнт робочих ходів.
- Обґрунтування ширини загінки.
Механізовані роботи у господарстві пов'язані з переміщенням машинно-тракторних агрегатів, що на більшості видів робіт здійснюють циклічне повторення рухів.
Кінематика машинно-тракторних агрегатів — це вчення про способи руху їх при виконанні робіт.
Кінематика агрегату — це траєкторія руху агрегату при виконанні сільськогосподарських робіт з точки зору геометричних форм. При виконанні технологічних операцій машинний агрегат здійснює робочі (робочі органи машин в роботу включені) та холості (робочі органи машин з роботи виключені) ходи.
Спосіб руху — закономірність циклічно повторюваних елементів руху машинного агрегату.
При будь-яких способах руху агрегату траєкторія складається з прямо- та криволінійних відрізків, причому кожна машина та її робочі органи рухаються з різними траєкторіями.
Для характеристики кінематики машинного агрегату при виконанні технологічних операцій введені деякі умовні поняття та позначення.
Кінематичним центром (Ца) називають таку точку агрегату, відносно траєкторії якої розглядають кінематику всіх інших його точок.
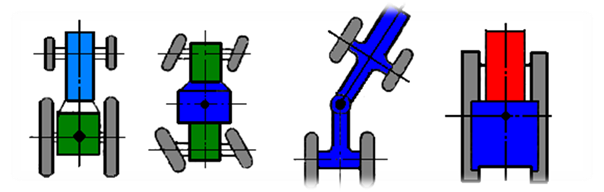
Рис.1. Розміщення кінематичного центра агрегату
а – колісний трактор з однією ведучою віссю; б – трактор схеми 4х4 та всіма керованими колесами; в – трактор зі шарнірним остовом; г – гусеничний трактор
Кінематична довжина la — це проекція відстані між Ца та лінією розміщення найвіддаленішого робочого органу при прямолінійному русі, вона складається із кінематичної довжини трактора lт, зчіпки lзч, сільськогосподарської машини lм.
Кінематична ширина dк — це проекція відстані між повздовжньою віссю та крайніми точками по ширині агрегату. Розрізняють dк праворуч та ліворуч.
Довжина виїзду е — це відстань на яку необхідно проїхати кінематичним центром агрегату Ца від контрольної лінії на поворотній смузі до початку повороту, щоб попередити пошкодження рослин або огріхи.
Центром повороту Цп називається точка, відносно якої в даний момент здійснюється поворот Ца.
Радіус повороту Rn — це відстань між Ца та Цп. При повороті з постійним радіусом Цп не змінює свого положення.
Найменший радіус повороту агрегату обумовлюється радіусом повороту трактора, конструктивними особливостями машин та зчіпки, габаритами агрегату, швидкістю руху, станом ґрунту, кваліфікацією тракториста.
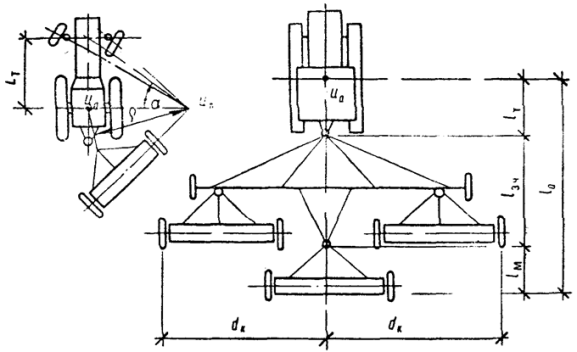
Рис. 2. Визначення найменшого радіуса повороту Кінематичні характеристики агрегату
Маневрові властивості машинних агрегатів характеризуються: поворотливістю, стійкістю та управляємістю руху, прохідністю.
Поворотливість — це властивість агрегату переходити з прямолінійного на криволінійний рух та навпаки.
Стійкість руху (поздовжня та поперечна), тобто властивість зберігати сталий напрямок руху.
Управляємість руху, тобто властивість агрегату переходити з сталого напрямку руху на інший, який задається дією керування. Для стійкості руху керованих мобільних машин у горизонтальній площині керовані колеса повинні знаходитися попереду ведучих коліс. Якщо керовані колеса розміщені позаду ведучих коліс, як, наприклад, у самохідного зернового комбайна, стійкість руху машини на повороті менша.
Прохідність агрегату — це властивість агрегату без допоміжних засобів своїм ходом долати перешкоди, які можуть зустрітися на шляху руху. Розрізняють два види перешкод: пухкі ґрунти, схили місцевості, броди та глибокі рівчаки; круті схили тощо. Перші вимагають таких властивостей, щоб мобільний енергетичний засіб розвивав рушійну силу, яка близька до граничного значення за зчепленням ходового апарата, а другі — низьким розміщенням центра ваги, максимальними кутами поздовжньої та поперечної стійкості агрегату.
Класифікація поворотів. При виконанні технологічних операцій деяку частину шляху складають повороти та заїзди агрегату. В середньому вони становлять 10…12%, а на коротких гонах до 40% загального шляху агрегату. Залежно від виду повороти класифікують на:
– безпетльові — по дузі кола без прямолінійного відрізку (дугоподібні); з прямолінійним відрізком;
– петльові — грушоподібні (відкрита петля); вісімкоподібні (закрита петля);
– повороти з заднім ходом агрегату з відкритою та закритою петлею (навісні агрегати);
– голчасті — при реверсивному ході агрегату.
Можливі і інші різновиди поворотів: з застосуванням бокової та подвійної петлі, кутові тощо.
Повороти виконують на 900 і 1800.
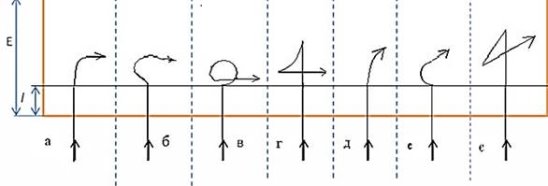
Рис. 3. Види поворотів на 900:
Е – ширина поворотної смуги, м; l – кінематична довжина виїзду агрегату, м;
а – безпетльовий по колу; б – петльовий з відкритою петлею; в – петльовий з закритою петлею; г – петльовий із застосуванням заднього ходу агрегату; д – безпетльовий кутовий; е – петльовий кутовий; ж – петльовий кутовий з застосуванням заднього ходу агрегату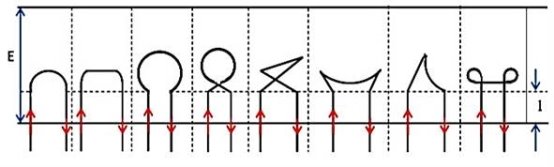
Рис. 4. Види поворотів на 1800:
а – по колу; б – з прямолінійним виїздом; в – грушоподібний; г – вісімкоподібний; д – із застосуванням заднього ходу агрегату (закрита петля); ж – із застосуванням заднього ходу агрегату (відкрита петля); з – голчастоподібний; і – здвоєнопетльовий
У тих випадках, коли не потрібно визначати дійсну траєкторію агрегату, а достатньо лише підрахувати середню довжину повороту застосовують умовний радіус повороту ρy — радіус півкола, довжина якого дорівнює фактичній довжині Ln безпетльового дугоподібного повороту агрегату на кут π :
![]()
Земельна площа, на якій використовують агрегат, називають робочою ділянкою. Розміри ділянки кінематично характеризують її довжина L та ширина А. Робочу ділянку або її частину, призначені для виконання технологічної операції, називають загінками. Для обраного способу руху і конкретного агрегату кожна загінка має ширину С, довжину Lр робочої частини, а також ширину поворотної смуги Е.
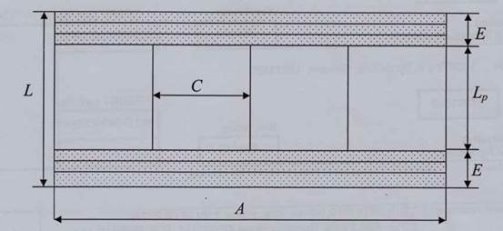
Рис. 5. Кінематичні характеристики робочої ділянки:
А – ширина поля; L – довжина поля; С – ширина загінки; Е – ширина поворотної смуги; Lр – довжина гонів
Ширина поворотної смуги. Мінімальну ширину поворотної смуги E з врахуванням умовного радіуса повороту визначають:
– для безпетльових поворотів:
![]()
– для петльових поворотів:
![]()
Поворотна смуга повинна бути кратною ширині захвату агрегату, що поліпшує якість обробітку.
При груповій роботі агрегатів поворотну смугу відбивають такої ширини, яку має агрегат з найбільшим радіусом повороту.
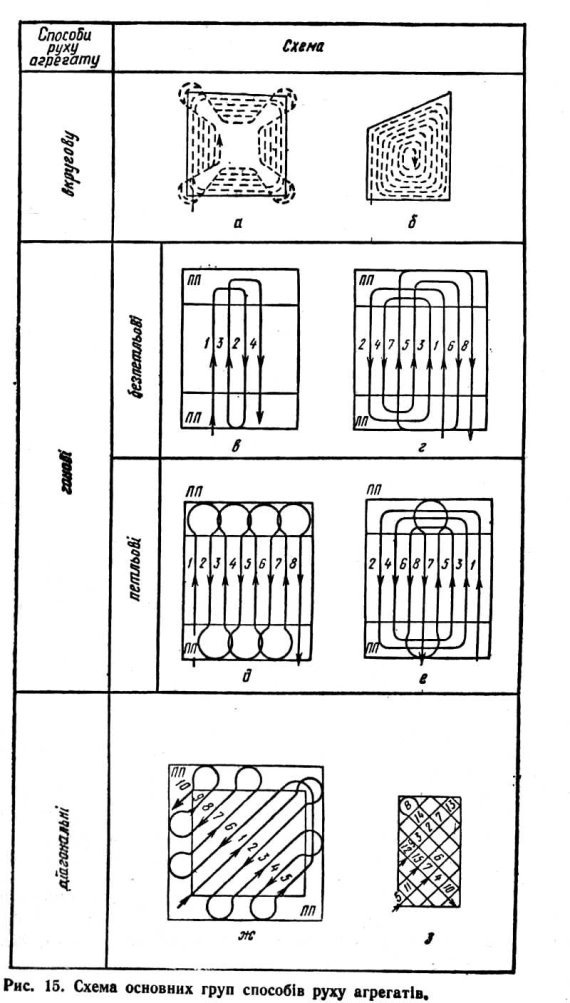
Для виконання сільськогосподарських робіт застосовують різні способи руху агрегатів: гонові, діагональні та кругові (фігурні).
При гоновому способі агрегат рухається вздовж одного з боків поля, а холості повороти виконує на його кінцях (поворотних смугах). Обробіток поля (загінки) у такому випадку може здійснюватися човником, всклад, врозгін або комбінованим способом.
Під час роботи човником поля на окремі загінки не розбивають і при внесенні добрив, поверхневому обробітку ґрунту, сівбі, міжрядному обробітку агрегати виконують поступально-зворотній рух, починаючи з одного боку поля і завершують на протилежному боці. Можлива організація робіт від середини поля, коли два агрегати після першого проходу з лівим і правим кроком оброблюють площу від середини до зовнішніх меж.
При діагональному способі агрегат виконує робочі ходи під кутом до сторони поля. Цей спосіб характеризується рухом агрегату човником при обробітку поля в один слід або перехресним рухом при обробітку поля в два сліди.
При круговому способі руху агрегат виконує робочі ходи від зовнішніх меж поля до центра і від центра до периферії.
Якість виконання технологічних операцій суттєво залежить від способу руху. Так, гонові способи руху краще застосовувати на оранці, культивації, сівбі; діагональні — на вирівнюванні, боронуванні, лущенні стерні в один або два сліди, а кругові — на збиранні зернових культур, природних та сіяних трав, льону-довгунця, лущенні дисковими лущильниками на полях з короткими гонами та неправильної конфігурації.
Вибір способу руху обґрунтовують якістю виконання роботи, зручністю обслуговування та виробітком машинних агрегатів.
Показники якості виконання роботи та зручність обслуговування при різних способах руху залежать від технологічного процесу (наприклад, для оранки кількість утворених звальних гребенів та розгінних борозен, ліній розмітки і т. ін.).
Коефіцієнт робочих ходів. Способи руху агрегатів зручно оцінювати коефіцієнтом робочих ходів φ :

де φ - коефіцієнт робочих ходів.
Сумарну довжину робочих ходів визначають за формулою:
![]() (м)
(м)
Сумарну довжину холостих ходів визначають за формулою:
![]() (м)
(м)
де Lx - довжина холостого ходу за один прохід агрегату і залежить від способу руху, виду повороту та ширини загінки.
Робоча довжина гону при човниковому русі, (із розшире-нням прокосів, з чергуванням загонів) визначається так:
![]() (м),
(м),
де Е – мінімальна довжина поворотної смуги (м).
Середня робоча довжина гону при русі круговим способом визначається за формулою:
![]() (м)
(м)
де С – ширина загінки (м).
При коловому способі руху мінімальна довжина поворотної смуги дорівнює ширині прокосів (4...10 м), тобто узгоджується з шириною захвату жатки.
За результатами розрахунку будується і аналізується графічна залежність коефіцієнта робочих ходів від довжини гонів.
Основними видами поворотів МТА є повороти на 180° і 90°. Агрегати, що працюють гоновим способом, повертають на 180°, а агрегати, що рухаються коловим способом - на 90°. При русі діагональним способом агрегат повертається на різні кути. Повороти діляться також на:
- петльові (з закритою й відкритою петлею);
- безпетльові.
Вид повороту визначається умовою
а) х < 2![]() - петльовий поворот;
- петльовий поворот;
б) х > 2![]() - безпетльовий поворот;
- безпетльовий поворот;
де х - відстань між початком та кінцем заїзду (м).
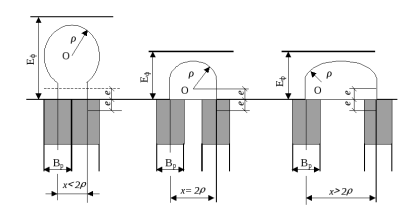
Рис. 6. Умови визначення виду повороту
З точки зору економії часу найбільш вигідними вважаються способи руху, де є безпетльові повороти - колові, кутові. Для агрегатів з великою шириною захвату можна використовувати грушеподібні чи односторонні петльові повороти, а для начіпних агрегатів - грибоподібні повороти (з заднім ходом агрегату). Під час збирання сільськогосподарських культур, коли не роблять кутових прокосів чи обкосів кутів загінки, приймають петльовий поворот на 90º.
Поворотну смугу на полі відбивають, якщо розворот агрегату за межами загінки не можливий.
Визначення ширини поворотної смуги. Ширина поворотної смуги на загінці має бути обґрунтованою. Її розміри не можуть перевищувати мінімуму, що регламентують дві умови: можливість безперешкодного повороту агрегату і необхідність наступної обробки поворотної смуги цим же агрегатом.
Першу умову визначають конкретні кінематичні характеристики агрегату і його повороткість. Щоб під час холостих заїздів не було огріхів або підвищеного пошкодження рослин, під час обробки міжрядь треба ще до початку повороту вивести агрегат за межі оброблювальної ділянки на величину е – довжину виїзду агрегату, тобто відстань від контрольної лінії до центра агрегату, на яку його виводять на поворотну смугу до початку повороту.
У загальному випадку довжина виїзду залежить від типу агрегату, форми повороту, показників поворотності і кінематичної довжини агрегату.
Для начіпних агрегатів (із заднім начіплюванням) ![]() , для агрегатів з фронтальним (чи боковим) розміщенням робочих органів довжина виїзду має негативне значення, тобто поворот починається відразу після проходу робочими органами контрольної лінії на деякій відстані за нею;
, для агрегатів з фронтальним (чи боковим) розміщенням робочих органів довжина виїзду має негативне значення, тобто поворот починається відразу після проходу робочими органами контрольної лінії на деякій відстані за нею;
при цьому ![]() .
.
Для агрегатів з причіпними машинами ![]()
Другу складову ширини поворотної смуги визначає мінімально допустимий радіус повороту і показник поворотності агрегату. Враховуючи, що більшість полів захищені лісосмугами, третя складова ширини поворотної смуги береться не менше половини кінематичної ширини агрегату da.
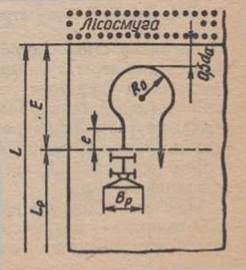
Рис. 7. Визначення ширини поворотної смуги
Отже, ширину поворотної смуги визначають з урахуванням характеристик агрегату і швидкості його руху на повороті. На ширину поворотної смуги впливає і стан ґрунту. Із збільшенням швидкості і зменшенням міцності ґрунтового покриву погіршуються умови повороту, зростає його радіус, що вимагає збільшення поворотної смуги.
Заокруглено під час роботи на рівному полі ширину поворотної смуги Eп визначають за такими формулами:
для петльових поворотів:
![]() м,
м,
або
![]() м,
м,
для безпетльових поворотів:
![]() , м,
, м,
або
![]() , м
, м
Враховуючи необхідність обробки поворотних смуг цим самим агрегатом (друга умова), їх ширину беруть кратною захвату агрегату:
![]()
де K– фактичне число проходів агрегату.
Результати округляють до цілого числа (парного чи непарного). Парність чи непарність числа проходів на поворотній смузі залежить від особливостей виконання операцій на поворотній смузі. У більшості випадків приймають парне число проходів.
Машинно-тракторний агрегат на полі рухається з певною послідовністю і закономірністю, які визначають спосіб його руху. Часто на одній і тій самій операції може бути застосовано кілька різних способів руху.
Із загального шляху, який проходить агрегат, у середньому 8…12 % (а на коротких ділянках до 40 %) припадає на холості заїзди на загінках, причому для конкретного поля довжина холостих заїздів залежить від правильного вибору способу руху. Будь-який зайвий кілометр, пройдений агрегатом вхолосту, – це непродуктивні затрати часу і палива. Скорочення холостого руху агрегату збільшує його робочий шлях за зміну, що сприяє зростанню продуктивності праці, зниженню витрат енергії.
Інколи вибір способу руху впливає на якість виконуваної операції. Наприклад, чергування оранки загінок, розміщених поряд, способом руху всклад-врозгін удвоє зменшує кількість гребенів і борозен, скорочує обсяг додаткової роботи на їх розрівнювання.
У багатьох випадках невдалий вибір способу руху і пов’язаних з ним поворотів агрегату на поворотній смузі призводить до нерівномірного спрацювання складаних одиниць керування поворотом і ходової частини.
Отже, правильний вибір раціональних способів руху агрегатів має велике значення для підвищення якісних і техніко-економічних показників їх роботи.
Вибір способу руху визначають три умови:
- досягнення максимальної продуктивності агрегату, яку характеризують значення коефіцієнта робочих ходів і використання часу зміни;
- якість виконуваних робіт, яку характеризують кількість утворених під час оранки всклад, а також у розгінних борозен, ступінь пошкодження рослин, повнота збирання врожаю, величина огріхів;
- зручність обслуговування агрегату, що характеризують кількість необхідних розміточних ліній, розміщення місць технологічних завантажень і довантажень, розміри поворотних смуг тощо.
Отже, ми бачимо, що вибір того чи іншого способу руху визначає, перш за все, якість виконання операції і залежить від виду і складу агрегату, розмірів ділянок і їх особливостей, зручності обслуговування, можливості скорочення допоміжних операцій тощо. Якщо для якої-небудь технологічної операції можна застосувати різні способи руху, то за однакової якості роботи та інших умов найкращий береться за найбільшим коефіцієнтом робочих ходів.

про публікацію авторської розробки
Додати розробку