Тестимо аполраоплвап

Данное руководство по эксплуатации является официальной документацией предприятия МИКРОЛ.
Продукция предприятия МИКРОЛ предназначена для эксплуатации квалифицированным персоналом, применяющим соответствующие приемы и только в целях, описанных в настоящем руководстве.
Коллектив предприятия МИКРОЛ выражает большую признательность тем специалистам, которые прилагают большие усилия для поддержки отечественного производства на надлежащем уровне, за то что они еще сберегли свою силу духа, умение, способности и талант.
![]()
В случае возникновения вопросов, связанных с применением оборудования предприятия МИКРОЛ, а также с заявками на приобретение обращаться по адресу:
 Предприятие МИКРОЛ
Предприятие МИКРОЛ
УКРАИНА, 76036, г.Ивано-Франковск, ул. Автолитмашевская, 5 Б,
Тел (8-0342)-502701, 502702, 502703, 502704, 504410, 504411
Факс (8-0342)-502704, 502705
E-mail: microl@microl.ua support@microl.ua
http: //www.microl.ua
Copyright © 2001-2009 by MICROL Enterprise. All Rights Reserved.
КРАТКОЕ СОДЕРЖАНИЕ
Состав руководства
|
Глава |
Наименование главы |
Стр. |
|
1 |
Введение |
6 |
|
2 |
Назначение. Функциональные возможности |
7 |
|
3 |
Технические характеристики |
8 |
|
4 |
Комплектность поставки. Модели регулятора МИК-21-05 |
12 |
|
5 |
Устройство и принцип работы |
14 |
|
6 |
Уровни работы, уровни защиты, уровни конфигурации и настроек |
21 |
|
7 |
Коммуникационные функции |
32 |
|
8 |
Указание мер безопасности |
42 |
|
9 |
Порядок установки и монтажа |
43 |
|
10 |
Подготовка к работе. Порядок работы |
44 |
|
11 |
Калибровка и проверка прибора |
50 |
|
12 |
Техническое обслуживание |
56 |
|
13 |
Транспортирование и хранение |
56 |
|
14 |
Гарантии изготовителя |
56 |
|
|
ПРИЛОЖЕНИЯ |
57 |
|
|
Приложение А. Габаритные и присоединительные размеры |
57 |
|
|
Приложение Б. Подключение прибора. Схемы внешних соединений |
58 |
|
|
Приложение В. Сводная таблица параметров регулятора МИК-21-05 |
72 |
С О Д Е Р Ж А Н И Е
1 Введение ………………………………..…………………..………………………. 6
2 Назначение. Функциональные возможности ……….………..……………. 7
3 Технические характеристики ……………………………………..……………. 8
3.1 Аналоговые входные сигналы ………………………………………………………………………. 8 Типы датчиков, пределы и точность измерения ……………………………………………. 8
3.2 Аналоговый выходной сигнал ……….………………………………………………………………. 9
3.3 Дискретные входные сигналы ………………………………………………………………………. 9
3.4 Дискретные (импульсные) выходные сигналы ………………………………………..…………. 9
3.4.1 Транзисторный выход ……………………………………………………………………. 9
3.4.2 Релейный выход ………………………………………………………….………………. 10
3.4.3 Выход – твердотельное реле …………………………………..………………………. 10
3.4.4 Оптосимисторный выход …………………………………………..……………………. 10
3.5 Регулятор …………………………………………………………………………………….…………. 10
3.6 Последовательный интерфейс RS-485 ……………………………………………………………. 11
3.7 Электрические данные …………………………………………………………….…………………. 11 3.8 Корпус. Условия эксплуатации ……………………..………………………………………………. 11
4 Комплектность поставки. Модели регулятора МИК-21-05 ……….…..…. 12
5 Устройство и принцип работы ……………………………..…………………. 14
5.1 Конструкция прибора …………………………………………………………………………………. 14
5.2 Передняя панель прибора ………………………………………………………..…………………. 14
5.3 Назначение дисплеев передней панели …………………………………………………..………. 14
5.4 Назначение светодиодных индикаторов …………………………………….……………………. 15
5.5 Назначение клавиш ……………………………………………………………………..……………. 15
5.6 Структурная схема регулятора МИК-21-05 ……………………………………….………………. 16
5.7 Принцип работы регулятора МИК-21-05 ………………………………………………..…………. 16
5.8 Структура блока регулирования МИК-21-05 ……………………………….…………..…………. 17 5.9 Распределение входов-выходов структур регулятора МИК-21-05 ………………..…………. 19
6 Уровни работы, уровни защиты, уровни конфигурации и настроек ... 21
6.1 Диаграмма уровней работы, уровней защиты и уровней конфигурации ……………………. 21
6.2 Уровни защиты ………………………………………………………………………..………………. 21
6.3 Рабочий уровень. Режим РАБОТА …………………………………………………………………. 21
6.4 Изменение режимов рабочего уровня, уровни защиты рабочего уровня …………..………. 22 6.4.1 Изменение режима работы регулятора ………………………………………………. 22 Автоматический режим работы. Переход на ручной режим работы …………. 22 Ручной режим работы. Переход на автоматический режим работы …………. 22 6.4.2 Выбор вида и изменение значения заданной точки …………..……………………. 23 Выбор вида заданной точки …………………………………………………………. 23 Изменение значения внутренней заданной точки ………………….……………. 24 Режимы изменения и переключения заданной точки ……….…….……………. 24
6.4.3 Изменение значения управляющего воздействия ……………….…………………. 26
6.4.4 Режимы индикации регулятора ……………………….…………….…………………. 26
6.4.5 Коррекция измеряемого параметра и внутренней заданной точки ……………... 27
6.4.5.1 Коррекция измеряемого параметра ……………………………………… 27
6.4.5.2 Коррекция внутренней заданной точки ………………………………….. 27
6.4.5.3 Пример расчета коэффициентов коррекции ……………………..…….. 28
6.5 Уровень конфигурации и настроек …………………………………………………………………. 29
6.5.1 Вызов уровня конфигурации и настроек …………………………………..…………. 29
6.5.2 Назначение уровней конфигурации ……..……………………………………………. 30
6.5.3 Выбор параметров ………………………………………………….……………………. 30
6.5.4 Фиксирование настроек ……..…………………………………………..………………. 31
6.5.5 Уровень разрешения входа в конфигурацию и запись параметров в энергонезависимую память …………………………………………………………………………………………. 31
7 Коммуникационные функции …………………………………….……………. 32
7.1 Таблица программнодоступных регистров регулятора МИК-21-05 ………..…………………. 35
7.2 MODBUS протокол ………………………….………………………..………………….……………. 37
7.3 Пример расчета контрольной суммы (CRC) ………….………………………..…………………. 38 7.4 Формат команд …………...………………….………………………….…………..…………………. 41
8 Указание мер безопасности ……………………………………………………. 42
9 Порядок установки и монтажа ………………………………..………………. 43
9.1 Требования к месту установки ………………………….………………………..…………………. 43
9.2 Соединение с внешними устройствами. Входные и выходные цепи ………..………………. 43 9.3 Подключение электропитания блоков …………………………………………..…………………. 43
10 Подготовка к работе. Порядок работы ………………….…………………. 44
10.1 Подготовка к работе …………………………………………………………………………………. 44
10.2 Конфигурация прибора ………………………………………………………….………………….. 44
10.3 Режим РАБОТА ………………………………………………………………………………………. 45
10.4 Передаточная функция регулятора МИК-21 ………………………………………….………… 46
10.5 Ручная установка параметров регулирования по переходной функции объекта регулирования …………………………………………………………………………… 47
10.6 Ручная настройка параметров импульсного итерационного П-регулятора ……………… 48
11 Калибровка и проверка прибора …………………………………………….. 50
11.1 Калибровка аналоговых входов ………………………………………………..…………………. 50
11.1.1 Порядок калибровки унифицированных входов ………………..…………………. 50
11.1.2 Порядок калибровки входов для подключения термометров сопротивления .. 50 11.1.3 Калибровка входа для подключения датчиков термометров сопротивления ТСМ 100М и термопар …………………………………………………….…..…………………. 51
11.1.4 Типы датчиков и рекомендуемые пределы калибровки …………………………. 51
11.2 Линеаризация аналоговых входов AI1 и AI2 ……..…………………………..…………………. 52
11.2.1 Параметры линеаризации входа AI1 и AI2 …….………………..…………………. 52
11.2.2 Определение опорных точек линеаризации …………..………..…………………. 52
11.2.3 Примеры линеаризации сигналов ….……………………………..…………………. 53 11.3 Калибровка аналогового выхода …………………..…………………………..…………………. 55
12 Техническое обслуживание ……………………………………..……………. 56 13 Транспортирование и хранение …………………………..…………………. 56 14 Гарантии изготовителя ………………………………………..………………. 56
ПРИЛОЖЕНИЯ ……………………………………………………..…………………. 57
Приложение А Габаритные и присоединительные размеры …………. 57
Приложение Б Подключение прибора. Схемы внешних соединений .. 58
Б.1 Схема расположения сигналов и габаритные размеры клеммно-блочного соединителя КБЗ-25-11 …………………………………………………………….………. 59 Б.2 Схема расположения сигналов и габаритные размеры клеммно-блочных соединителей КБЗ-28Р-11, КБЗ-28К-11, КБЗ-28С-11……………...….…………………. 60 Б.3 - Схема распайки кабеля клеммно-блочных соединителей
КБЗ-25-11-0,75, КБЗ-28Р-11-0,75, КБЗ-28К-11-0,75 и КБЗ-28С-11-0,75 …………..…..….…………………. 61 Б.4 Подключение датчиков к прибору с помощью КБЗ-25-11……....…………………. 62 Б.5 Подключение датчиков к прибору с помощью КБЗ-28Р-11,
КБЗ-28К-11 или КБЗ-28С-11………………………………………………………………………………………… 63 Б.6 Подключение исполнительных устройств к аналоговому выходу АО …………….. 64 Б.7 Подключение дискретных нагрузок к КБЗ-25-11 и КБЗ-28Р-11 …………………….. 65
Б.8 Подключение дискретных нагрузок к КБЗ-28К-11 …………………………………….. 66
Б.9 Подключение дискретных нагрузок к КБЗ-28С-11 …………………………………….. 67
Б.10 Схема подключения интерфейса RS-485 …………………………………………...… 69
Б.11 Подключение дискретных входов (датчиков) к прибору …………………………..… 71
Приложение В Сводная таблица параметров регулятора МИК-21-05 ….. 72
1 Введение
Настоящее руководство по эксплуатации предназначено для ознакомления потребителей с назначением, моделями, принципом действия, устройством, монтажом, эксплуатацией и обслуживанием универсального микропроцессорного ПИД-регулятора МИК-21-05 (в дальнейшем регулятор МИК-21-05).
![]() ВНИМАНИЕ ! Перед использованием изделия, пожалуйста, ознакомьтесь
ВНИМАНИЕ ! Перед использованием изделия, пожалуйста, ознакомьтесь
с настоящим руководством по эксплуатации регуляторов МИК-21-05.
Пренебрежение мерами предосторожности и правилами эксплуатации может стать причиной травмирования персонала или повреждения оборудования!
В связи с постоянной работой по совершенствованию изделия, повышающей его надежность и улучшающей характеристики, в конструкцию могут быть внесены незначительные изменения, не отраженные в настоящем издании.
Сокращения, принятые в данном руководстве
В наименованиях параметров, на рисунках, при цифровых значениях и в тексте использованы сокращения и аббревиатуры (см. таблицу 1.1), означающие следующее:
Таблица 1.1 - Сокращения и аббревиатуры
|
Аббревиатура (символ) |
Полное наименование |
Значение |
|
PV или X |
Process Variable |
Измеряемая величина (контролируемый и регулируемый параметр) |
|
SP или W |
Setpoint |
Заданная точка (задание регулятору) |
|
MV или Y |
Manipulated Variable |
Манипулируемая переменная, переменная представляющая значение управляющего воздействия, подаваемого на аналоговый выход устройства |
|
Z |
External Disturbance |
Внешнее возмущающее воздействие |
|
LSP |
Local Setpoint |
Локальная (внутренняя) заданная точка |
|
RSP |
Remote Setpoint |
Дистанционная (удаленная) заданная точка |
|
T, t |
Time |
Время, интервал времени |
|
AI |
Analogue Input |
Аналоговый ввод |
|
DI |
Discrete Input |
Дискретный ввод |
|
AO |
Analogue Output |
Аналоговый вывод |
|
DO |
Discrete Output |
Дискретный вывод |
2 Назначение. Функциональные возможности
Регуляторы МИК-21-05 представляют собой новый класс современных цифровых регуляторов непрерывного действия с аналоговым, импульсным или двухпозиционным выходом. Регуляторы применяются для управления технологическими процессами в промышленности. Регулятор МИК-21-05 позволяет обеспечить высокую точность поддержания значения измеряемого параметра. Отличительной особенностью регулятора МИК-21-05 является наличие трехуровневой гальванической изоляции между входами, выходами и цепью питания.
Регулятор предназначен как для автономного, так и для комплексного использования в АСУТП в энергетике, металлургии, химической, пищевой и других отраслях промышленности и народном хозяйстве.
Регулятор МИК-21-05 предназначен:
● для измерения контролируемого входного физического параметра (температура, давление, расход, уровень и т. п.), обработки, преобразования и отображения его текущего значения на встроенном четырехразрядном цифровом индикаторе,
● регулятор формирует выходной аналоговый или импульсный сигнал управления внешним исполнительным механизмом, обеспечивая аналоговое, импульсное или позиционное регулирование входного параметра по П, ПИ, ПД или ПИД закону в соответствии с заданной пользователем логикой работы и параметрами регулирования,
Структура регулятора МИК-21-05 посредством конфигурации может быть изменена таким образом, что могут быть решены следующие задачи регулирования:
9 Двухпозиционного (до четырех каналов - при использовании функции свободно-программируемых дискретных выходов прибора) или трехпозиционного регулятора,
9 ПИД-регулятора с аналоговым выходом, ПИД-регулятора с импульсным выходом с внешней или внутренней обратной связью по положению исполнительного механизма, ПИД-ШИМ-регулятора с импульсным выходом, итерационного П-регулятора с импульсным выходом,
9 Регулятор с автоматической коррекцией измеряемого и регулируемого параметра по второму аналоговому входу,
9 Регулятор с автоматической коррекцией внутренней заданной точки (тип коррекции – статическая, динамическая по изменению заданной точки или по внешнему событию на дискретном входе), 9 Регулятор, включающий до 2-х заданных величин (внутренней и/или внешней),
9 Ведомого регулятора в каскадных схемах регулирования,
9 Контуров автоматического регулирования с управлением от ЭВМ,
9 Прибора ручного управления импульсным исполнительным механизмом, с индикацией задающего воздействия и индикацией реального значения положения исполнительного механизма, 9 Индикатора двух физических величин, 9 Задатчика функций.
Внутренняя программная память регулятора МИК-21-05 содержит большое количество стандартных функций необходимых для управления технологическими процессами большинства инженерных прикладных задач, например, таких как:
● возможность подключения различных типов датчиков,
● сравнение результата преобразования с уставками минимум и максимум, а также сигнализацию отклонений (технологически опасных зон), выбор типа технологической сигнализации – абсолютная или девиационная (зависящая от заданной точки),
● программная калибровка каналов по внешнему образцовому источнику аналогового сигнала, ● цифровая фильтрация,
● произвольное масштабирование шкал измеряемых параметров, линеаризация входных сигналов,
● извлечение квадратного корня,
● режимы статической и динамической балансировки,
● мониторинг исправности датчиков (их линий связи или измерительного канала) с системой безопасного управления исполнительными механизмами,
● ретрансмиссия входных аналоговых параметров на аналоговый выход устройства и многое др.
Регулятор представляет собой свободно программируемый компактный прибор. Пользователь, не имеющий знаний и навыков программирования, может просто вызывать и исполнять эти функции путем конфигурации регулятора МИК-21-05. Регуляторы МИК-21-05 очень гибкие в использовании и могут быстро и легко, изменив конфигурацию, выполнить большинство встречаемых требований и задач управления технологическими процессами.
Регуляторы МИК-21-05 конфигурируются через переднюю панель прибора или через гальванически разделенный интерфейс RS-485 (протокол ModBus), что также позволяет использовать прибор в качестве удаленного контроллера при работе в современных сетях управления и сбора информации.
Параметры конфигурации регулятора МИК-21-05 сохраняются в энергонезависимой памяти и прибор способен возобновить выполнение задач управления после прерывания напряжения питания. Батарея резервного питания не используется.
Регуляторы могут изготавливаться по индивидуальному техническому заданию для выполнения конкретной технологической задачи.
3 Технические характеристики
Виды сигналов, пределы их изменения и их количество приведены в п. 3.1 - 3.8
3.1 Аналоговые входные сигналы
AI1 - входной измеряемый, контролируемый и регулируемый параметр
AI2 - входной сигнал внешней заданной точки (задания) или положение исполнительного механизма
Таблица 3.1.1 - Технические характеристики аналоговых входных сигналов
|
Техническая характеристика |
Значение |
|
Количество аналоговых входов |
2 |
|
Тип входного аналогового сигнала |
Унифицированные ГОСТ 26.011-80 0-5 мА, Rвх=400 Ом 0-20 мА, Rвх=100 Ом 4-20 мА, Rвх=100 Ом 0-10В, Rвх=27 кОм Напряжение 0 … 75 мВ, 0 … 200 мВ, 0 … 2 В
Термопреобразователи сопротивлений ДСТУ 2858-94 ТСМ 50М, W100=1,428, -50 … +200°С ТСМ 100М, W100=1,428, -50 … +200°С ТСМ гр.23, -50 … +180°С ТСП 50П, W100=1,391, Pt50, -50 … +650°С ТСП 100П, W100=1,391, Pt100, -50 … +650°С ТСП гр.21, -50 … +650°С
Термопары по ДСТУ 2837-94 (ГОСТ3044-94, DIN IEC 584-1): ТЖК (J), 0 ... +1100°С ТХК (L), 0°…+800°C ТХКн (E), 0 ... +850°С ТХА (K), 0 ... +1300°С ТПП10 (S), 0 ... +1600°С ТПР (B), 0 ... +1800°С ТВР-1 (А-1), 0 ... +2500°С |
|
Разрешающая способность АЦП |
≤ 0,0015 % |
|
Предел допускаемой основной приведенной погрешности измерения входных параметров |
≤ 0,2 % для унифицированных аналоговых входов ≤ 0,2 % или ≤ 0,5°С для датчиков ТСМ ≤ 0,2 % или ≤ 1,4°С для датчиков ТСП ≤ 0,2 % или ≤ 2,2°С для датчиков ТЖК ≤ 0,2 % или ≤ 1,6°С для датчиков ТХК ≤ 0,2 % или ≤ 1,7°С для датчиков ТХКн ≤ 0,2 % или ≤ 2,6°С для датчиков ТХА ≤ 0,2 % или ≤ 3,2°С для датчиков ТПП10 ≤ 0,2 % или ≤ 3,6°С для датчиков ТПР ≤ 0,2 % или ≤ 5°С для датчиков ТВР |
|
Точность индикации |
0,01 % |
|
Влияние температуры окружающей среды |
≤ ±0,2 %/10°С |
|
Период измерения |
Не более 0,1 сек |
|
Гальваническая развязка аналоговых входов |
Каждый вход гальванически изолирован от других входов и остальных цепей |
Примечания.
1. Каждый канал регулятора МИК-21-05 может быть сконфигурирован на подключение любого типа датчика.
2. При заказе входа типа термопара третий вход используется в качестве входа температурной коррекции, компенсации термо-ЭДС свободных концов термопары. Датчик температуры третьего входа находится на КБЗ.
3.2 Аналоговый выходной сигнал
AO - выходной аналоговый сигнал управления внешним исполнительным механизмом (управляющее воздействие) или ретрансмиссия входного сигнала AI1 или AI2.
Таблица 3.2 - Технические характеристики аналоговых унифицированных выходных сигналов
|
Техническая характеристика |
Значение |
|
Количество аналоговых выходов |
1 |
|
Тип выходного аналогового сигнала |
Унифицированные ГОСТ 26.011-80 0-5 мА, Rн ≤ 2000 Ом 0-20 мА, Rн ≤ 500 Ом 4-20 мА, Rн ≤ 500 Ом 0-10В, Rн ≥ 2000 Ом |
|
Разрешающая способность ЦАП |
≤ 0,0015 % |
|
Предел допускаемой основной приведенной погрешности формирования выходного сигнала после калибровки |
≤ 0,2 % |
|
Зависимость выходного сигнала от сопротивления нагрузки |
≤ 0,1 % |
|
Влияние температуры окружающей среды |
≤ ±0,2 %/10°С |
|
Гальваническая развязка аналогового выхода |
Выход гальванически изолирован от других выходов и остальных цепей |
3.3 Дискретные входные сигналы
Таблица 3.3 - Технические характеристики дискретных входных сигналов
|
Техническая характеристика |
Значение |
|
Количество дискретных входов |
2 |
|
Сигнал логического "0" – состояние ОТКЛЮЧЕНО Сигнал логической "1" – состояние ВКЛЮЧЕНО |
0-7В, отрицательной полярности 18-30В, отрицательной полярности |
|
Входной ток (потребление по входу) |
≤ 10 мА |
|
Гальваническая развязка дискретных входов |
Входы связаны попарно и гальванически изолированы от других входов и остальных цепей, поканальная изоляция при использовании КБЗ-25-11 |
3.4 Дискретные (импульсные) выходные сигналы
3.4.1 Транзисторный выход
Таблица 3.4.1 - Технические характеристики дискретных выходных сигналов. Транзисторный выход
|
Техническая характеристика |
Значение |
|
Количество дискретных выходов |
4 |
|
Тип выхода |
Открытый коллектор (NPN транзистора) |
|
Максимальное напряжение коммутации |
≤ 40 В постоянного тока |
|
Максимальный ток нагрузки каждого выхода |
≤ 100 мА |
|
Гальваническая развязка дискретных выходов |
Выходы связаны в группу из четырех выходов и гальванически изолированы от других выходов и остальных цепей |
|
Сигнал логического "0"
Сигнал логической "1" |
Разомкнутое состояние транзисторного ключа
Замкнутое состояние транзисторного ключа. |
|
Вид нагрузки |
Активная, индуктивная |
|
Напряжение внешнего источника питания |
Нестабилизированное, (20-40)В постоянного тока |
3.4.2 Релейный выход, при наличии в заказе клеммно-блочного соединителя с реле КБЗ-28Р-11
Таблица 3.4.2 - Технические характеристики дискретных выходных сигналов. Релейный выход
|
Техническая характеристика |
Значение |
|
Количество дискретных выходов |
4 |
|
Тип выхода |
Переключающие контакты реле |
|
Максимальное напряжение коммутации переменного (действующее значение) или постоянного тока |
220В |
|
Максимальный ток нагрузки каждого выхода |
≤ 8 А |
|
Сигнал логического "0" Сигнал логической "1" |
Разомкнутое состояние контактов реле. Замкнутое состояние контактов реле. |
|
Вид нагрузки |
Активная, индуктивная |
|
Максимальное потребление (обмоток реле) четырех включенных каналов от внешнего источника постоянного тока 24В |
80 мА |
|
Напряжение внешнего источника питания |
Нестабилизированное, (20-28)В постоянного тока |
3.4.3 Выход – твердотельное (не механическое) реле, при наличии в заказе клеммно-блочного соединителя с твердотельными реле КБЗ-28К-11
Таблица 3.4.3 - Технические характеристики дискретных выходных сигналов. Выход – твердотельное реле.
|
Техническая характеристика |
Значение |
|
Количество дискретных выходов |
4 |
|
Тип выхода |
Замыкающие контакты реле |
|
Максимальное напряжение коммутации переменного (действующее значение) или постоянного тока |
60В макс. |
|
Максимальный ток нагрузки каждого выхода |
≤ 1 А (АС) переменного тока, ≤ 1 А (DС) постоянного тока |
|
Сигнал логического "0" Сигнал логической "1" |
Разомкнутое состояние контактов реле. Замкнутое состояние контактов реле. |
|
Вид нагрузки |
Активная, индуктивная |
|
Максимальное потребление четырех включенных каналов от внешнего источника постоянного тока 24В |
80 мА |
|
Напряжение внешнего источника питания |
Нестабилизированное, (20-28)В постоянного тока |
3.4.4 Оптосимисторный выход, при наличии в заказе клеммно-блочного соединителя с оптосимисторами КБЗ-28С-11
Таблица 3.4.4 - Технические характеристики дискретных выходных сигналов. Оптосимисторный выход
|
Техническая характеристика |
Значение |
|
Количество дискретных выходов |
4 |
|
Тип выхода |
Маломощный оптосимистор, встроенный детектор нулевого напряжения фазы позволяет включать нагрузку только при минимальном напряжении на ней (предотвращает создание помех в сети) |
|
Максимальное напряжение коммутации переменного (действующее значение) или постоянного тока |
Не более 800В переменного тока |
|
Максимальный ток нагрузки каждого выхода |
- не более 50 мА - в импульсном режиме частотой 50 Гц с длительностью импульса не более 5 мс – до 1 А - пиковый ток перегрузки с длительностью импульса 100 мкс и частотой 120 имп/с – до 1 А |
|
Сигнал логического "0" Сигнал логической "1" |
Отключенное состояние оптосимистора. Включенное состояние оптосимистора. |
|
Вид нагрузки |
Активная, индуктивная |
|
Максимальное потребление четырех включенных каналов от внешнего источника постоянного тока 24В |
80 мА |
|
Напряжение внешнего источника питания |
Нестабилизированное, (20-28)В постоянного тока |
3.5 Регулятор
Таблица 3.5 - Технические характеристики регулятора
|
Техническая характеристика |
Значение |
|
Число контуров регулирования |
1 |
|
Вид регулятора |
Аналоговый регулятор (управляет аналоговым выходом АО) Импульсный регулятор (с импульсным выходом) ПИД – ШИМ регулятор (с дискретным выходом) Двухпозиционный регулятор (с дискретным выходом) Трехпозиционный регулятор (с дискретным выходом) |
|
Режимы работы регулятора |
Локальный, дистанционный, ручной, автоматический |
|
Метод установки заданной точки |
Локальный (цифровой), внешний (аналоговый), интерфейсный |
|
Структура регулятора (законы регулирования) |
П, ПИ, ПД, ПИД Двухпозиционный Трехпозиционный |
|
Контролируемые параметры |
Измеряемая величина, заданная точка, значение выхода или положение исполнительного механизма |
|
Вид балансировки узла задатчика |
Статическая, динамическая |
3.6 Последовательный интерфейс RS-485
Таблица 3.6 - Технические характеристики последовательного интерфейса RS-485
|
Техническая характеристика |
Значение |
|
Конфигурации сети |
Многоточечная |
|
Количество приборов |
32 на одном сегменте |
|
Максимальная длина линии в пределах одного сегмента сети |
1200 метров (4000 футов) |
|
Количество активных передатчиков |
1 (только один передатчик активный) |
|
Максимальное количество приборов в сети |
248 (с использованием магистральных усилителей) |
|
Характеристика скорость обмена/длина линии связи (зависимость экспоненциальная): |
62,5 кбит/с 1200 м (одна витая пара) 375 кбит/с 300 м (одна витая пара)
Примечание. На скоростях обмена свыше 115 кбит/с рекомендуется использовать экранированные витые пары. |
|
Тип приемопередатчиков |
Дифференциальный, потенциальный |
|
Вид кабеля |
Витая пара, экранированная витая пара |
|
Гальваническая развязка |
Интерфейс гальванически изолирован от входов-выходов и остальных цепей |
|
Протокол связи |
Modbus режим RTU (Remote Terminal Unit) |
|
Назначение интерфейса |
Для конфигурирования прибора, для использования в качестве удаленного контроллера при работе в современных сетях управления и сбора информации (приема-передачи команд и данных) |
3.7 Электрические данные
Таблица 3.7 - Технические характеристики электропитания
|
Техническая характеристика |
Значение |
|
Электропитание (подключение к сети) |
~220 (+22 –33)В, (50 ± 1) Гц |
|
Потребляемая мощность |
≤ 8,5 Вт |
|
Защита данных |
EEPROM, сегнетоэлектрическая NVRAM |
|
Подключение |
С задней стороны прибора с помощью разъема – клеммы. |
3.8 Корпус. Условия эксплуатации
Таблица 3.8 - Условия эксплуатации
|
Техническая характеристика |
Значение |
|
Тип корпуса |
Корпус для утопленного щитового монтажа |
|
Размеры фронтальной рамки |
96 х 96 мм |
|
Монтажная глубина |
190 мм max |
|
Вырез на панели |
92+0,8 х 92+0,8 мм |
|
Крепление корпуса |
В электрощитах |
|
Рекомендуемая температура |
от минус 40 °С до 70 °С |
|
Температура хранения (предельная) |
То же |
|
Климатическое исполнение |
исполнение группы 4 согласно ГОСТ 22261, но для работы при температуре от минус 40 °С до 70 °С |
|
Атмосферное давление |
от 85 до 106,7 кПа |
|
Вибрация |
исполнение 5 согласно ГОСТ 22261 |
|
Помещение |
закрытое, взрыво-, пожаробезопасное. Воздух в помещении не должен содержать пыли и примеси агрессивных паров и газов, вызывающих коррозию (в частности: газов, содержащих сернистые соединения или аммиак). |
|
Положение при монтаже |
Любое |
|
Степень защиты |
IP30; клеммно-блочное соединение IP20 по ГОСТ 14254- |
|
Масса |
< 1,0 кг |
4 Комплектность поставки. Модели регулятора МИК-21-05
4.1 Объем поставки регулятора МИК-21-05
Таблица 4.1 - Объем поставки регулятора МИК-21-05
|
Наименование изделия |
Количество |
|
Универсальный микропроцессорный ПИД-регулятор МИК-21-05 |
1 |
|
Комплект крепежных зажимных элементов |
1 |
|
Руководство по эксплуатации (из расчета - 1 экземпляр на 1-4 изделия при поставке в один адрес) |
1 |
|
Клеммно-блочный соединитель КБЗ-25-11-0,75 для модели с транзисторными выходами |
* |
|
Клеммно-блочный соединитель КБЗ-28Р-11-0,75 для модели с релейными выходами |
* |
|
Клеммно-блочный соединитель КБЗ-28К-11-0,75 для модели с выходами – твердотельные реле |
* |
|
Клеммно-блочный соединитель КБЗ-28С-11-0,75 для модели с оптосимисторными выходами |
* |
* поставляется по отдельному заказу
4.2 Модели регулятора МИК-21-05
Обозначение при заказе: МИК-21-05-АА-ВВ-С-DD-U,
Где:
АА и ВВ, соответственно код входа 1-го и 2-го каналов:
01 - унифицированный 0-5 мА
02 - унифицированный 0-20 мА
03 - унифицированный 4-20 мА
04 - унифицированный 0-10 В
05 - Напряжение 0 … 75 мВ
06 - Напряжение 0 … 200 мВ
07 - Напряжение 0 … 2В
08 - ТСМ 50М, W100=1,428, -50 … +200°С
09 - ТСМ 100М, W100=1,428, -50 … +200°С
10 - ТСМ гр.23, -50 … +180°С
11 - ТСП 50П, W100=1,391, -50 … +650°С
12 - ТСП 100П, W100=1,391, -50 … +650°С
13 - ТСП гр.21, -50 … +650°С
14 - ТХА (K), 0 ... +1300°С 15 - ТХК (L), 0°…+800°C
16 - ТЖК (J), 0 ... +1100°С
17 - ТХКн (E), 0 ... +850°С
18 - ТПП10 (S), 0 ... +1600°С
19 - ТПР (B), 0 ... +1800°С
20 - ТВР-1 (А-1), 0 ... +2500°С
C - код выходного аналогового сигнала: 1 - 0-5 мА, 2 - 0-20 мА, 3 - 4-20 мА, 4 - 0-10В
DD - наличие, тип и длина клеммно-блочного соединителя входных и выходных сигналов:
Т 0 - КБЗ отсутствует,
Т 0,75 - транзисторными выходами КБЗ-25-11-0,75, Р 0,75 - с релейными выходами КБЗ-28Р-11-0,75,
С 0,75 - с симисторными выходами КБЗ-28С-11-0,75, К 0,75 - с твердотельными реле КБЗ-28К-11-0,75.
Буква соответствует типу выходного сигнала и типу соединителя:
Цифра 0,75 соответствует стандартной длине соединителя в метрах.
U - напряжение питания:
220 - 220В переменного тока, 24 - 24В постоянного тока
Пример исполнения клеммно-блочного соединителя:
|
КБЗ-25-11-0,75 |
КБЗ-28Р-11-0,75 |
КБЗ-28К-11-0,75 |
КБЗ-28С-11-0,75 |
|
-------------- ------ |
---------------- ------ |
---------------- ------ |
---------------- ------ |
|
1 2 |
1 2 |
1 2 |
1 2 |
где: 1 - КБЗ-25-11, КБЗ-28Р-11, КБЗ-28К-11, КБЗ-28С-11 – модель и исполнение клеммно-блочного соединителя, 2 – длина клеммно-блочного соединителя в метрах (по-умолчанию 0,75м).
Внимание! При заказе прибора необходимо указывать его полное название, в котором присутствуют типы аналоговых входов, аналогового выхода, наличие, тип и длина клеммно-блочного соединителя и напряжение питания.
Например, заказано изделие: МИК-21-05-09-03-2-Р 0,75-220
При этом изготовлению и поставке потребителю подлежит:
1)универсальный микропроцессорный ПИД-регулятор МИК-21-05,
2)Вход аналоговый AI1 "Параметр" код 09 - ТСМ 100М, W100=1,428, -50 … +200°С,
3)Вход аналоговый AI2 "Задание" код 03 - 4-20 мА,
4)Выход аналоговый AO код 2 - 0-20мА,
5)Клеммно-блочный соединитель код Р 0,75 - КБЗ-28Р-11-0,75, 6) Напряжение питания код 220 - 220В переменного тока.
5 Устройство и принцип работы
5.1 Конструкция прибора
Регулятор МИК-21-05 сконструирован по блочному принципу и включает:
● пластмассовый корпус,
● фронтальный блок передней панели с элементами обслуживания (клавиатурой) и индикации, ● блок задней части с сетевым разъемом и разъемом для подключения клеммно-блочного соединителя, предназначенных для подключения внешних входных и выходных цепей.
5.2 Передняя панель прибора
Для лучшего наблюдения и управления технологическим процессом регулятор МИК-21-05 оборудован активной четырехразрядной цифровой индикацией для отображения измеряемой величины - дисплей ПАРАМЕТР, заданной точки - дисплей ЗАВДАННЯ, значения управляющего воздействия - дисплей ВИХІД, подаваемого на аналоговый выход устройства, необходимым количеством клавиш обслуживания и сигнализационных светодиодных индикаторов для различных статусных режимов и сигналов. Внешний вид передней панели регулятора МИК-21-05 приведен на рисунке 5.1.
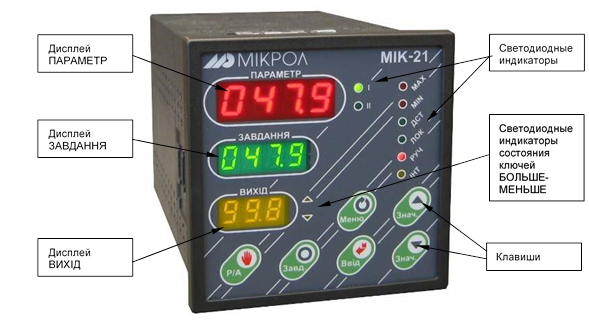
Рисунок 5.1 - Внешний вид передней панели регулятора МИК-21-05
5.3 Назначение дисплеев передней панели
|
● Дисплей ПАРАМЕТР |
В режиме РАБОТА индицирует значение выбранной измеряемой величины. В режиме КОНФИГУРИРОВАНИЕ индицирует значение выбранного параметра.
|
|
● Дисплей ЗАВДАННЯ |
В режиме РАБОТА индицирует значение заданной точки (внутренней или внешней) или значение второго аналогового входа. В режиме КОНФИГУРИРОВАНИЕ индицирует номер параметра конфигурации.
|
|
● Дисплей ВИХІД |
В режиме РАБОТА индицирует значение управляющего воздействия, подаваемого на аналоговый или импульсный выход устройства, сигнал положения исполнительного механизма (в %) или состояние дискретных входоввыходов регулятора. В режиме КОНФИГУРИРОВАНИЕ индицируются символы «ПР», указывающие пользователю о том, что прибор находится в режиме конфигурации (программирования). |
5.4 Назначение светодиодных индикаторов
● Индикатор MAX Светится, если значение измеряемой величины превышает значение уставки сигнализации отклонения MAX. Мигает, если осуществлен запуск ожидания события.
● Индикатор MIN Светится, если значение измеряемой величины меньше значения уставки сигнализации отклонения MIN. Мигает, если осуществлен запуск ожидания события.
● Индикатор ДСТ Светится, если для регулятора задана внешняя заданная точка (вход AI2).
● Индикатор ЛОК Светится, если для регулятора задана локальная (внутренняя) заданная точка (задание регулятору задается с передней панели).
● Индикатор РУ Светится, если регулятор находится в ручном режиме управления, и не светится, если регулятор находится в автоматическом режиме управления.
● Индикатор ІНТ Мигает, если происходит передача данных по интерфейсному каналу связи.
● Индикатор І Светится, если на дисплее ПАРАМЕТР индицируется значение первого аналогового входа AI1.
● Индикатор ІІ Светится, если на дисплее ЗАВДАННЯ индицируется значение второго аналогового входа AI2.
● Индикатор ▲ Светодиодный индикатор состояния ключа БОЛЬШЕ импульсного или трехпозиционного регулятора. Светится при включенном ключе БОЛЬШЕ.
● Индикатор ▼ Светодиодный индикатор состояния ключа МЕНЬШЕ импульсного или трехпозиционного регулятора. Светится при включенном ключе МЕНЬШЕ.
5.5 Назначение клавиш
Каждое нажатие клавиши вызывает переход из автоматического режима работы в режим ручного управления и обратно (совместно с нажатием клавиши [©], для
● Клавиша [Р/А] подтверждения выполнения операции перехода).
Клавиша предназначена для вызова индицируемого значения внутренней заданной точки (задания) для редактирования или для переключения режимов заданных ● Клавиша [ЗВД]
величин (внутренней и/или внешней заданной величины).
Клавиша "больше". При каждом нажатии этой клавиши осуществляется увеличение значений, заданной точки, выходного сигнала управления (управляющего воздействия) ● Клавиша [▲] или значения изменяемого параметра. При удерживании этой клавиши в нажатом
положении увеличение значений происходит непрерывно.
Клавиша "меньше". При каждом нажатии этой клавиши осуществляется уменьшение значений, заданной точки, выходного сигнала управления (управляющего воздействия)
● Клавиша [▼] или значения изменяемого параметра. При удерживании этой клавиши в нажатом положении уменьшение значений происходит непрерывно.
Клавиша предназначена для подтверждения выполняемых действий или операций, для фиксации вводимых значений. Например, подтверждение перехода из автоматического режима работы в режим ручного управления и обратно, фиксация
● Клавиша [©] ввода измененной заданной точки, подтверждение входа в режим конфигурации, продвижение по уровням конфигурации и т.п.
Клавиша предназначена для вызова меню конфигурации, а также продвижения по меню конфигурации.
● Клавиша [3]
В режиме РАБОТА при нажатии данной изменяется режим индикации регулятора.
5.6 Структурная схема регулятора МИК-21-05
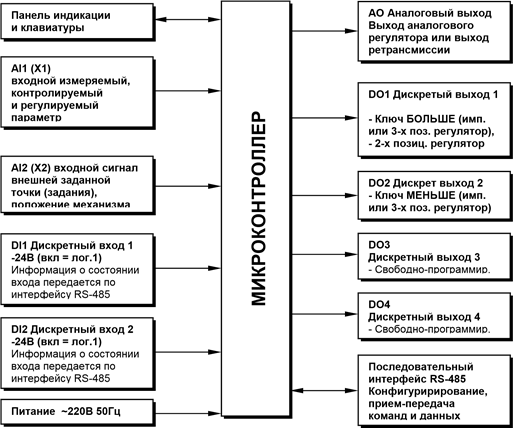
Рисунок 5.2 - Структурная схема регулятора МИК-21-05
5.7 Принцип работы регулятора МИК-21-05
Регулятор МИК-21-05, структурная схема которого приведена на рисунке 5.2, представляет собой устройство измерения значения входного параметра, обработки и преобразования входного сигнала и выдачи управляющих воздействий.
Регулятор МИК-21-05 работает под управлением современного, высоко интегрированного микроконтроллера RISC архитектуры, изготовленного по высокоскоростной КМОП технологии с низким энергопотреблением. В постоянном запоминающем устройстве располагается большое количество функций для решения задач контроля и регулирования. Посредством конфигурирования пользователь может самостоятельно настраивать регулятор на решение определенных задач.
Регулятор МИК-21-05 оснащен аналого-цифровым преобразователем, узлами дискретно-цифрового ввода и цифро-дискретного вывода, сторожевыми схемами для контроля циклов работы программы, энергонезависимой памятью EEPROM, NVRAM для сохранения пользовательских параметров конфигурации и данных.
Внутренняя программа регулятора МИК-21-05 функционирует с постоянным временным циклом. В начале каждого цикла внутренней рабочей программы считываются значения аналоговых и дискретных входов, производится считывание и обработка клавиатуры (подавление дребезга и обнаружение достоверности), прием команд и данных из последовательного интерфейса. При помощи этих входных сигналов осуществляются, в соответствии с запрограммированными функциями и пользовательскими параметрами конфигурации, все расчеты. После этого осуществляется вывод информации на дискретные выходы, на индикационные элементы, а так же фиксация вычисленных величин для режима передачи последовательного интерфейса.
5.8 Структура блока регулирования МИК-21
В случае если выбран тип регулятора (п. 10.03 меню конфигурации, Приложение В):
• 0000 – индикатор,
• 0001 – аналоговый ПИД-регулятор,
• 0002 – ПИД-ШИМ регулятор,
• 0004 – 3-х позиционный регулятор,
• 0005 - 2-х позиционный регулятор, то внутренняя структура блока регулирования МИК-21 будет иметь вид приведенный на рисунке 5.3.
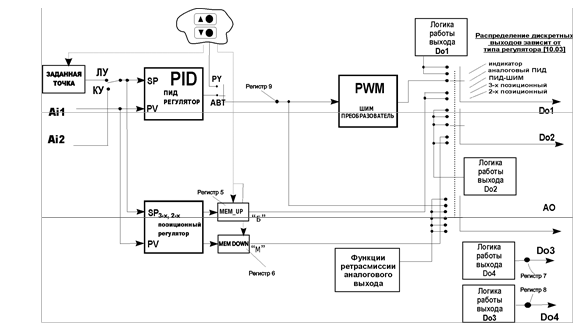
Рисунок 5.3 - Функциональная схема блока регулирования МИК-21.
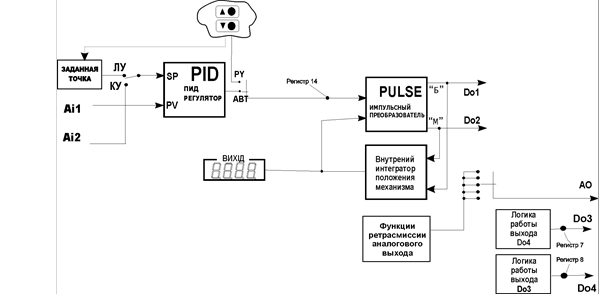
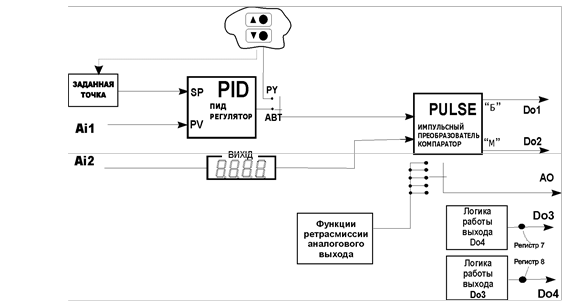
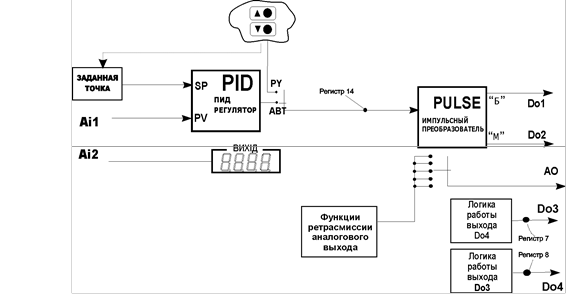
В случае если выбран тип регулятора (п. 10.03 меню конфигурации, Приложение В):
• 0003 – импульсный ПИД-регулятор,
• 0006 – импульсный итерационный П-регулятор, то в зависимости от значения п. 10.13 меню конфигурации внутренняя структура блока регулирования МИК-21 будет иметь вид приведенный на рисунке 5.4.
а)
б)
в)
Рисунок 5.3 - Функциональная схема ПИД-импульсного/П-импульсного итерационного блока регулирования МИК-21.
а) – блок регулирования МИК-21 в случае если 10.13 ≠ 0003, 0006 (см. Приложение В),
б) – блок регулирования МИК-21 в случае если 10.13 = 0003 (см. Приложение В),
в) – блок регулирования МИК-21 в случае если 10.13 = 0006 (см. Приложение В).
5.9 Распределение входов-выходов структур регулятора МИК-21-05
5.9.1 Индикатор.
|
Структура регулятора, определяемая параметром [10.03] |
Аналоговый вход AI1 |
Аналоговый вход AI2 |
Аналоговый выход AO |
Дискретный вход DI1 2) |
Дискретный вход DI2 2) |
Дискретный выход DO1 |
Дискретный выход DO2 |
Дискретный выход DO3 |
Дискретный выход DO4 |
|
0000 – индикатор |
Параметр 1 |
Параметр 2 |
Ретранс миссия3) |
Не исп. |
Не исп. |
Своб. прогр. 1) |
Своб. прогр. 1) |
Своб. прогр. 1) |
Своб. прогр. 1) |
5.9.2 Аналоговый ПИД регулятор.
|
Структура регулятора, определяемая параметром [10.03] |
Аналоговый вход AI1 |
Аналоговый вход AI2 |
Аналоговый выход AO |
Дискретный вход DI1 2) |
Дискретный вход DI2 2) |
Дискретный выход DO1 |
Дискретный выход DO2 |
Дискретный выход DO3 |
Дискретный выход DO4 |
|
0001 – аналоговый ПИД-регулятор |
Регулируемый параметр |
Внешнее задание, см. п.10.13 |
Выход регулятора |
Не исп., см. уровень 8 |
Не исп., см. уровень 8 |
Своб. прогр. 1) |
Своб. прогр. 1) |
Своб. прогр. 1) |
Своб. прогр. 1) |
5.9.3 ШИМ – ПИД регулятор.
|
Структура регулятора, определяемая параметром [10.03] |
Аналоговый вход AI1 |
Аналоговый вход AI2 |
Аналоговый выход AO |
Дискретный вход DI1 2) |
Дискретный вход DI2 2) |
Дискретный выход DO1 |
Дискретный выход DO2 |
Дискретный выход DO3 |
Дискретный выход DO4 |
|
0002 – ПИД-ШИМ- регулятор |
Регулируемый параметр |
Внешнее задание, см. п.10.13 |
Ретранс миссия3) |
Не исп., см. уровень 8 |
Не исп., см. уровень 8 |
Выход ПИДШИМ регулятора |
Своб. прогр. 1) |
Своб. прогр. 1) |
Своб. прогр. 1) |
5.9.4 Импульсный ПИД регулятор.
|
Структура регулятора, определяемая параметром [10.03] |
Аналоговый вход AI1 |
Аналоговый вход AI2 |
Аналоговый выход AO |
Дискретный вход DI1 2) |
Дискретный вход DI2 2) |
Дискретный выход DO1 |
Дискретный выход DO2 |
Дискретный выход DO3 |
Дискретный выход DO4 |
|
0003 – ПИДимпульсный регулятор |
Регулируемый параметр |
Внешнее задание, см. п.10.13 |
Ретранс миссия3) |
Концевой выключатель Закрыто (0%), см. уров. 8 |
Концевой выключатель Открыто (100%), см. уров. 8 |
Выход Больше |
Выход Меньше |
Своб. прогр. 1) |
Своб. прогр. 1) |
5.9.5 3-х позиционный регулятор.
|
Структура регулятора, определяемая параметром [10.03] |
Аналоговый вход AI1 |
Аналоговый вход AI2 |
Аналоговый выход AO |
Дискретный вход DI1 2) |
Дискретный вход DI2 2) |
Дискретный выход DO1 |
Дискретный выход DO2 |
Дискретный выход DO3 |
Дискретный выход DO4 |
|
0004 – 3-х позиционный регулятор |
Регулируемый параметр |
Внешнее задание, см. п.10.13 |
Ретранс миссия3) |
Не исп., см. уровень 8 |
Не исп., см. уровень 8 |
Выход Больше |
Выход Меньше |
Своб. прогр. 1) |
Своб. прогр. 1) |
5.9.6 2–х позиционный регулятор
|
Структура регулятора, определяемая параметром [10.03] |
Аналоговый вход AI1 |
Аналоговый вход AI2 |
Аналоговый выход AO |
Дискретный вход DI1 2) |
Дискретный вход DI2 2) |
Дискретный выход DO1 |
Дискретный выход DO2 |
Дискретный выход DO3 |
Дискретный выход DO4 |
|
0005 – 2-х позиционный регулятор |
Регулируемый параметр |
Внешнее задание, см. п.10.13 |
Ретранс миссия3) |
Не исп., см. уровень 8 |
Не исп., см. уровень 8 |
Выход 2-х поз. регулятора |
Своб. прогр. 1) |
Своб. прогр. 1) |
Своб. прогр. 1) |
5.9.7 Импульсный итерационный П регулятор.
|
Структура регулятора, определяемая параметром [10.03] |
Аналоговый вход AI1 |
Аналоговый вход AI2 |
Аналоговый выход AO |
Дискретный вход DI1 2) |
Дискретный вход DI2 2) |
Дискретный выход DO1 |
Дискретный выход DO2 |
Дискретный выход DO3 |
Дискретный выход DO4 |
|
0006 – импульсный итерационный П-регулятор |
Регулируемый параметр |
Внешнее задание, см. п.10.13 |
Ретранс миссия3) |
Не исп., см. уровень 8 |
Не исп., см. уровень 8 |
Выход Больше |
Выход Меньше |
Своб. прогр. 1) |
Своб. прогр. 1) |
Примечания.
1. Сигналы DO1-DO4 являются свободно-программируемыми. Т.е. если какой-либо из сигналов DO1DO4 не задействован в структуре выбранного типа регулятора (см. параметр 10.03), то свободный дискретный выход может в соответствии с выбранной логикой работы и уставками управляться одним из выбранных аналоговых сигналов (см. параметры 4.00, 5.00, 6.00, 7.00).
1.1 Если 4.00, 5.00, 6.00, 7.00 = 0007, то есть включена опция интерфейсного вывода, это означает, что данным выходом управляет, не регулятор, а он (этот выход) управляется по интерфейсу.
2. Дискретные входа DI1 и DI2 используются в структуре регулятора 10.03=0003 – импульсный регулятор с внешней обратной связью - с концевыми выключателями Особенности использования дискретных входов:
2.1 Чтобы не вносить в систему управления недостоверную информацию о положении исполнительного механизма при кратковременных (по различным причинам) срабатываниях концевых выключателей положение исполнительного механизма не корректируется в состоянии 0% или 100% блокирует срабатывание выходных ключей регулятора БОЛЬШЕ-МЕНЬШЕ соответственно срабатываниям концевых выключателей.
2.2 Информация о состоянии дискретных входов передается по интерфейсу RS-485.
3. При использовании функции ретрансмиссии на аналоговый выход прибора передаются следующие аналоговые сигналы регулятора (см. параметры уровня 9):
3.1 Значение аналогового входа AI1, AI2; рассогласование регулятора, текущее задание регулятора, только для функции ретрансмиссии (во всех структурах регуляторов кроме 10.03=0001).
6 Уровни работы, уровни защиты, уровни конфигурации и настроек
6.1 Диаграмма уровней работы, уровней защиты и уровней конфигурации
Более детально уровни работы, уровни защиты и уровни конфигурации описаны в последующих разделах данной главы. Диаграмма уровней работы, защиты и настроек регулятора МИК-21-05 приведена на рисунк 6.1.
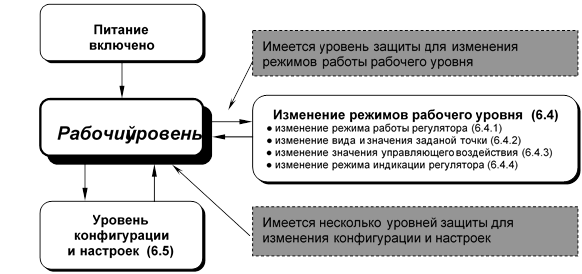
Рисунок 6.1 - Диаграмма уровней работы, защиты и настроек регулятора МИК-21-05
6.2 Уровни защиты
![]() Уровни защиты в той или иной степени запрещают выполнение нежелательных действий. !!! Данные уровни защиты предназначены для защиты оборудования, технологического процесса и в конечном итоге пользователя: от неверного или случайного ввода значений и переключений режимов работы, от несанкционированного или нежелательного доступа посторонних лиц к системе управления.
Уровни защиты в той или иной степени запрещают выполнение нежелательных действий. !!! Данные уровни защиты предназначены для защиты оборудования, технологического процесса и в конечном итоге пользователя: от неверного или случайного ввода значений и переключений режимов работы, от несанкционированного или нежелательного доступа посторонних лиц к системе управления.
Имеется несколько уровней защиты:
|
Уровни защиты рабочего уровня |
1)Уровень защиты изменения режимов рабочего уровня 2)Уровень защиты изменения вида и значения заданной точки |
|
Уровни защиты изменения конфигурации и настроек |
1) Уровень защиты при входе в режим конфигурации для доступа к параметрам 1-й группы 2) Уровень защиты при входе в режим конфигурации для доступа к параметрам 2-19-й групп |
6.3 Рабочий уровень. Режим РАБОТА
Прибор переходит на этот уровень всякий раз, когда включается питание.
Из этого уровня можно перейти на изменение режимов рабочего уровня или на уровень конфигурации и настроек.
Обычно этот уровень выбирается во время работы для управления контуром регулирования. В процессе работы можно осуществлять мониторинг, т.е. визуально отслеживать измеряемую величину, заданную точку и значение управляющего воздействия. Кроме того, можно отслеживать на светодиодных индикаторах вид выбранной заданной точки, сигналы технологической сигнализации при превышении верхнего и нижнего пределов отклонения.
6.4 Изменение режимов рабочего уровня, уровнизащиты рабочего уровня
На рабочем уровне возможно изменение режима работы регулятора – осуществление перехода из автоматического режима управления в ручной режим управления и обратно, осуществлять выбор вида заданной точки и изменять значение заданной точки – локальная (внутренняя) или дистанционная (внешняя), изменять значение управляющего воздействия (в ручном режиме управления регулятором). Имеется уровень защиты для изменения режимов работы рабочего уровня.
6.4.1 Изменение режима работы регулятора
В регуляторе МИК-21-05 имеется два режима работы управления объектом регулирования:
● автоматический режим работы и ручной режим работы.
Режим работы регулятора - автоматический или ручной является запоминаемым состоянием. После включения питания регулятор находится в том режиме, в котором он находился на момент отключения.

Автоматический режим работы. Переход на ручной режим работы
Автоматический ● В автоматическом режиме работы регулятор управляет объектом регулирования режим работы согласно выбранного закона регулирования и с соответствующими настройками пользователя.
![]() РУ ● В автоматическом режиме работы индикатор РУ на передней панели погашен.
РУ ● В автоматическом режиме работы индикатор РУ на передней панели погашен.
) [Р/А] ● Для перехода в ручной режим управления необходимо нажать клавишу [Р/А] на передней панели регулятора.
![]() РУ ● Индикатор РУ на передней панели начинает мигать.
РУ ● Индикатор РУ на передней панели начинает мигать.
) [©] ● Если оператор нажал клавишу [©] в процессе мигания индикатора РУ (приблизительно 3-4 секунды) – произойдет фиксация выбранного режима и регулятор перейдет в режим ![]() РУ ручного управления, индикатор РУ будет светиться – что будет в дальнейшем указывать на ручной режим работы.
РУ ручного управления, индикатор РУ будет светиться – что будет в дальнейшем указывать на ручной режим работы.
Уровень ● Если оператор не подтверждает своих действий нажатием клавиши [©], то данные защиты действия оператора воспринимаются как неверное действие или случайное переключение режима работы.
● Это и представляет уровень защиты от случайного переключения режима работы, индикатор РУ перестанет мигать и погаснет, а регулятор останется в автоматическом режиме управления.
Ручной режим работы. Переход на автоматический режим работы
Ручной режим ● В ручном режиме работы оператор с передней панели с помощью клавиш [▲] работы “больше” и [▼] “меньше”, управляет выходом регулятора, тем самым формирует значение управляющего воздействия, подаваемое на исполнительный механизм. ![]() РУ ● Индикатор РУ на передней панели светится.
РУ ● Индикатор РУ на передней панели светится.
)[Р/А] ● Для перехода в автоматический режим управления необходимо нажать клавишу [Р/А] на передней панели регулятора.
![]() РУ ● Индикатор РУ на передней панели начинает мигать, если оператор нажал клавишу [©] в процессе мигания индикатора РУ (приблизительно 3-4 секунды) – произойдет ) [©] фиксация выбранного режима и регулятор перейдет в режим автоматического управления, индикатор РУ погаснет – что будет в дальнейшем указывать на
РУ ● Индикатор РУ на передней панели начинает мигать, если оператор нажал клавишу [©] в процессе мигания индикатора РУ (приблизительно 3-4 секунды) – произойдет ) [©] фиксация выбранного режима и регулятор перейдет в режим автоматического управления, индикатор РУ погаснет – что будет в дальнейшем указывать на ![]() РУ автоматический режим работы.
РУ автоматический режим работы.
Уровень ● Если оператор не подтверждает своих действий нажатием клавиши [©], то данные защиты действия оператора воспринимаются как неверное действие или случайное переключение режима работы.
● Это и представляет уровень защиты от случайного переключения режима работы, индикатор РУ перестанет мигать и погаснет, а регулятор останется в автоматическом режиме управления.
6.4.2 Выбор вида и изменение значения заданнойточки
При включении регулятора МИК-21-05 устанавливается режим РАБОТА. На дисплей ПАРАМЕТР выводится значение измеряемой величины, а на дисплей ЗАВДАННЯ — значение заданной точки.
В регуляторе МИК-21-05 имеется два вида заданной точки, используемой только в автоматическом режиме управления. Данные виды заданных точек программируются пользователем и выбираются согласно пункта [10.13] меню конфигурации:
[10.13] = 0000,3,4,5,6 – только внутренняя заданная точка, [10.13] = 0001 – внутренняя и внешняя заданная точка.
[10.13] = 0002 – внутренняя и внешняя заданная точка
(с коррекцией или без внутренней заданной точки).
Внутренняя заданная точка изменяется с передней панели прибора. Значение внутренней заданной точки является запоминаемым значением. После включения питания регулятор начинает работу с тем значением и с тем видом заданной точки, которое было на момент отключения.
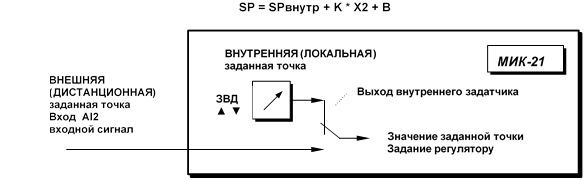
Внешняя заданная точка задается с внешнего аналогового входа AI2. При выбранном виде заданной точки как ВНЕШНЯЯ возможен только ее контроль на дисплее ЗАВДАННЯ, изменить ее значение с передней панели регулятора невозможно. В этом же режиме возможно изменить внутреннюю заданную точку, что важно при работе с коррекцией внутренней заданной точки. Коррекция заданной точки регулятора осуществляется по формуле:
Выбор вида заданной точки.
Пример перехода с внутренней на внешнюю заданную точку
● Например, в меню конфигурации установлен следующий вид заданной точки:
![]() ДСТ [10.13]=0001 – внутренняя и внешняя заданная точка или [10.13]=0002 – с или без ЛОК коррекции заданной точки. После включения питания прибор находился в режиме внутренней заданной точки, о чем свидетельствует свечение индикатора ЛОК. ● Для изменения вида заданной точки с внутренней на внешнюю заданную точку ) [ЗВД] необходимо нажать клавишу [ЗВД].
ДСТ [10.13]=0001 – внутренняя и внешняя заданная точка или [10.13]=0002 – с или без ЛОК коррекции заданной точки. После включения питания прибор находился в режиме внутренней заданной точки, о чем свидетельствует свечение индикатора ЛОК. ● Для изменения вида заданной точки с внутренней на внешнюю заданную точку ) [ЗВД] необходимо нажать клавишу [ЗВД].
● ![]() На передней панели начинают мигать индикатор ЛОК и дисплей ЗАВДАННЯ. На ДСТ данном этапе при мигающем индикаторе ЛОК и дисплее ЗАВДАННЯ возможно ЛОК изменение значения внутренней (локальной) заданной точки.
На передней панели начинают мигать индикатор ЛОК и дисплей ЗАВДАННЯ. На ДСТ данном этапе при мигающем индикаторе ЛОК и дисплее ЗАВДАННЯ возможно ЛОК изменение значения внутренней (локальной) заданной точки.
● В процессе мигания индикатора ЛОК и дисплея ЗАВДАННЯ нажать клавишу [ЗВД].
) [ЗВД]
● ![]() Индикатор ЛОК перестает мигать и светится ровным светом, указывая оператору на ДСТ котором виде заданной точки находится регулятор, а индикатор КУ начинает мигать, ЛОК указывая тем самым на какую заданную точку будет осуществлен переход.
Индикатор ЛОК перестает мигать и светится ровным светом, указывая оператору на ДСТ котором виде заданной точки находится регулятор, а индикатор КУ начинает мигать, ЛОК указывая тем самым на какую заданную точку будет осуществлен переход.
● Если оператор нажал клавишу [©] в процессе мигания индикатора ДСТ ) [©] (приблизительно 3-4 секунды) – произойдет фиксация выбранного вида заданной точки (регулятор перейдет на внешнюю заданную точку).
![]() ДСТ ● Индикатор ЛОК погаснет, а индикатор ДСТ будет светиться, что указывает о
ДСТ ● Индикатор ЛОК погаснет, а индикатор ДСТ будет светиться, что указывает о
ЛОК переходе на внешнюю (дистанционную) заданную точку. Либо работа с коррекцией
|
Уровень защиты
|
внутренней заданной точки по аналоговому входу AI2.
● Если оператор не подтверждает своих действий нажатием клавиши [©] в процессе мигания индикатора ДСТ (приблизительно 3-4 секунды), то данные действия оператора воспринимаются как неверное действие или случайное переключение режима работы. ● Это и представляет уровень защиты от случайного переключения режима работы, индикатор ЛОК перестанет мигать и начнет светиться, а регулятор останется на внутренней (локальной) заданной точке. |
Изменение значения внутренней заданной точки
![]() ● Прибор находится в режиме внутренней (локальной) заданной точки, о чем ДСТ свидетельствует свечение индикатора ЛОК. Индикатор ДСТ светится не должен на ЛОК всем протяжении операции по изменению значения внутренней заданной точки.
● Прибор находится в режиме внутренней (локальной) заданной точки, о чем ДСТ свидетельствует свечение индикатора ЛОК. Индикатор ДСТ светится не должен на ЛОК всем протяжении операции по изменению значения внутренней заданной точки.
) [ЗВД] ● Для изменения значения внутренней (локальной) заданной точки необходимо нажать клавишу [ЗВД].
 ДСТ ● На передней панели начинают мигать индикатор ЛОК и дисплей ЗАВДАННЯ. На ЛОК данном этапе при мигающем индикаторе ЛОК и дисплее ЗАВДАННЯ возможно изменение значения внутренней (локальной) заданной точки.
ДСТ ● На передней панели начинают мигать индикатор ЛОК и дисплей ЗАВДАННЯ. На ЛОК данном этапе при мигающем индикаторе ЛОК и дисплее ЗАВДАННЯ возможно изменение значения внутренней (локальной) заданной точки.
ЗАВДАННЯ
015.0
● С передней панели с помощью клавиш [▲] “больше” и [▼] “меньше”, установить ) [▲] необходимое значение внутренней заданной точки, индицируемой на дисплее ) [▼] ЗАВДАННЯ.
● Если оператор нажал клавишу [©] в процессе мигания индикатора ЛОК ) [©] (приблизительно 3-4 секунды) - регулятор перейдет на режим управления с новым значением внутренней заданной точки.
● Индикатор ЛОК перестает мигать и светится ровным светом, указывая тем самым,
![]() ДСТ что вид заданной точки – внутренняя (локальная).
ДСТ что вид заданной точки – внутренняя (локальная).
ЛОК
|
Уровень защиты
|
● Если оператор не подтверждает своих действий нажатием клавиши [©] в процессе мигания индикатора ЛОК (приблизительно 3-4 секунды), то данные действия оператора воспринимаются как неверное действие или случайное изменение значения.
● Это и представляет уровень защиты от случайного изменения значения внутреннего задания, индикатор ЛОК перестанет мигать и начнет светиться, а регулятор вернется в работу с прежним значением внутренней (локальной) заданной точки. |
Примечание. Изменить значение внутренней заданной точки возможно в режиме внешней (каскадной) заданной точки, что необходимо при работе с коррекцией внутренней заданной точки.
Режимы изменения и переключения заданной точки
Очень важным для нормальной работы регуляторов является наличие в них безударного (плавного) переключения или изменения заданной точки. Переключение или изменение заданной точки регулятора МИК-21 происходит в случаях:
●переключение регулятора с ручного режима работы на автоматический;
●изменение значения внутренней заданной точки с передней панели прибора или по интерфейсу; ● переключение с внутренней заданной точки на дистанционную и наоборот.
Переключение или изменение заданной точки регулятора обеспечивается с помощью статической и динамической балансировки узла задатчика регулятора.
В зависимости от значений параметров меню конфигурации [10.06] – статическая балансировка задания и [10.07] – скорость динамической балансировки задания в регуляторе МИК-21 есть разные режимы статической и динамической балансировки:
●1 режим: [10.06]=0, [10.07]=0,
●2 режим: [10.06]=0, [10.07]≠0 – динамическая балансировка, ● 3 режим: [10.06]=1, [10.07]=0 – статическая балансировка, ● 4 режим: [10.06]=1, [10.07]≠0.
Функциональная схема работы балансировок показана на рисунке 6.2. Функции режимов статической и динамической балансировки показаны в таблице 6.1.
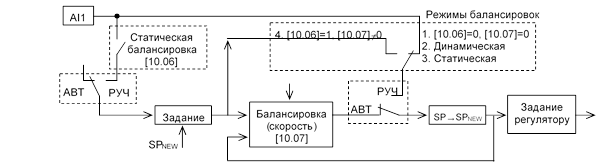
Рисунок 6.2. Функциональная схема балансировок регулятора МИК-21.
Примечание. На схеме условно показано положение переключателей для автоматического режима работы регулятора и динамической балансировки.
Таблица 6.1. Функции режимов балансировок регулятора МИК-21.
|
|
|
Значение параметров |
Динамика изменения заданной точки |
|
|
[10.06] |
[10.07] |
|||
|
Переключение режима работы РУЧНОЙ-АВТОМАТ |
1 |
0 |
0 |
Фиксированное значение заданной точки |
|
2 |
0 |
≠0 |
При переключении задание начинает изменятся от значения входа АІ1 до установленного значения задания со скоростью балансировки [10.07] |
|
|
3 |
1 |
0 |
При переключении SP= АІ1 |
|
|
4 |
1 |
≠0 |
При переключении регулятор не отрабатывает разницу SP и АІ1, а начинает работать с текущими их значениями |
|
|
Изменение внутреней заданой точки (с передней панели или по интерфейсу) |
1 |
0 |
0 |
Фиксированное значение заданной точки, ее изменение невозможно |
|
2 |
0 |
≠0 |
При изменении задание начинает изменятся от его предыдущего значения до установленного значения со скоростью балансировки [10.07] |
|
|
3 |
1 |
0 |
При изменении задание мгновенно меняется от его предыдущего значения до установленного |
|
|
4 |
1 |
≠0 |
При изменении задание начинает изменятся от его предыдущего значения до установленного значения со скоростью балансировки [10.07] |
|
|
Переключение с внутреней рабочей точки на внешнюю и наоборот |
1 |
0 |
0 |
Не возможно |
|
2 |
0 |
≠0 |
При переключении задание начинает изменятся от его предыдущего значения до установленного значения со скоростью балансировки [10.07] |
|
|
3 |
1 |
0 |
При переключении задание мгновенно менятся от его предыдущего значения до установленного |
|
|
4 |
1 |
≠0 |
При переключении задание начинает изменятся от его предыдущего значения до установленного значения со скоростью балансировки [10.07] |
|
Примечание. Если значение [10.07]≠0, то значение скорости динамической балансировки устанавливается в пределах (0; 999,9] тех.ед./мин.
6.4.3. Изменение значения управляющего воздействия
● Для изменения значения управляющего воздействия регулятор должен находиться в ручном режиме управления. Если регулятор находится в автоматическом режиме, его ![]() РУ необходимо перевести в ручной режим управления – см. раздел 6.4.1. Индикатор РУ на передней панели светится. Выбран ручной режим управления.
РУ необходимо перевести в ручной режим управления – см. раздел 6.4.1. Индикатор РУ на передней панели светится. Выбран ручной режим управления.
) [▲] ● В ручном режиме работы оператор с передней панели с помощью клавиш [▲] ) [▼] “больше” и [▼] “меньше”, управляет выходом регулятора, тем самым формирует значение управляющего воздействия, подаваемое на исполнительный механизм через ключи БОЛЬШЕ-МЕНЬШЕ или аналоговый выход, в зависимости от выбранного типа регулятора (см. параметр [10.03] уровня 10 конфигурации).
ВИХІД
|
20.0 |
● Значение выходного сигнала в % (в зависимости от выбранной структуры регулятора индицируется значение на дисплее ВИХІД:
-выходного аналогового сигнала,
-значение выдаваемой мощности на выходные ключи БОЛЬШЕ-МЕНЬШЕ, - внешний сигнал положения механизма (использование входа AI2).
![]() ВИХІД ● При изменении значения управляющего воздействия после первого нажатия любой 40.0 из клавиш [▲] “больше” или [▼] “меньше” начинает мигать дисплей ВИХІД, либо светодиодные индикаторы ▲ или ▼, указывая тем самым оператору какой параметр
ВИХІД ● При изменении значения управляющего воздействия после первого нажатия любой 40.0 из клавиш [▲] “больше” или [▼] “меньше” начинает мигать дисплей ВИХІД, либо светодиодные индикаторы ▲ или ▼, указывая тем самым оператору какой параметр
(сигнал) в данный момент изменяется.
ВИХІД
|
40.0 |
● После окончания изменения значения управляющего воздействия, по отпускании клавиш [▲] “больше” или [▼] “меньше” по истечении 3-4 секунд дисплей ВИХІД перестает мигать, а значение выхода фиксируется в энергонезависимой памяти.
6.4.4 Режимы индикации регулятора
● Основной режим индикации:
![]() І дисплей ПАРАМЕТР – значение входа АІ1, дисплей ЗАВДАННЯ – задание регулятора, ІІ дисплей ВИХІД – значение выхода регулятора.
І дисплей ПАРАМЕТР – значение входа АІ1, дисплей ЗАВДАННЯ – задание регулятора, ІІ дисплей ВИХІД – значение выхода регулятора.
І ● При нажатии клавиши 3 происходит переключение панели на дополнительный режим индикации.
ІІ При установленном значении параметра ([19.02]=0001) дополнительная панель имеет вид:
дисплей ПАРАМЕТР – значение входа АІ1,
дисплей ЗАВДАННЯ – значение входа АІ2,
дисплей ВИХІД – значение выхода регулятора.
При установленном значении параметра ([19.02]=0002) дополнительная панель имеет
вид:
дисплей ПАРАМЕТР – значение входа АІ1,
дисплей ЗАВДАННЯ – значение входа АІ2,
дисплей ВИХІД – состояние дискретных входов/выходов регулятора (см. ниже).
ВИХІД
ВКЛЮЧЕНО
ВЫКЛЮЧЕНО
DI1 DI2 DO1 DO2 DO3 DO4
![]() І
І
● При повторном нажатии клавиши 3 регулятор снова перейдет в основной режим ІІ индикации.
6.4.5 Коррекция измеряемого параметра и внутренней заданной точки
6.4.5.1 Коррекция измеряемого параметра
Коррекция измеряемого параметра, подаваемого на вход регулятора AI1 осуществляется по второму аналоговому входу регулятора AI2.
Х1 – измеряемая переменная, подаваемая на вход AI1.
Х2 - корректирующая переменная, подаваемая на вход AI2.
У – скорректированная величина измеряемой переменной, вычисляется по формуле:
У = Х1 + К * Х2 +В
Точка коррекции, в которой корректирующее значение равно нулю:
К * Х2 +В = 0
Откуда:
В
Х2 = – ----- = Хтк
К
Где Хтк – значение точки коррекции.
В точке коррекции Х2 = Хтк и У =Х1.
6.4.5.2 Коррекция внутренней заданной точки
В меню конфигурации установлен следующий вид заданной точки: [10.13]=0002 – коррекция заданной точки.
Внутренняя заданная точка изменяется с передней панели прибора. Значение внутренней заданной точки является запоминаемым значением. После включения питания регулятор начинает работу с тем значением и с тем видом заданной точки, которое было на момент отключения.
Внешняя заданная точка задается с внешнего аналогового входа AI2. При выбранном виде заданной точки как ВНЕШНЯЯ возможен только ее контроль на дисплее ЗАВДАННЯ, изменить ее значение с передней панели регулятора невозможно. В этом же режиме ДСТ возможно изменить внутреннюю заданную точку, что важно при работе с коррекцией внутренней заданной точки.
Коррекция внутренней заданной точки регулятора осуществляется по формуле:
SP = SPвнутр + Kр * X2 + B
SP – текущая, скорректированная заданная точка
SPвнутр – внутренняя нескорректированная заданная точка. Изменяется по нажатии клавиши ЗВД, индицируется на индикаторе ЗАВДАННЯ.
Индикация выбранных режимов коррекции внутренней заданной точки:
![]() ДСТ ● Работа по внутренней заданной точке без коррекции.
ДСТ ● Работа по внутренней заданной точке без коррекции.
ЛОК
ДСТ ● Работа с коррекцией внутренней заданной точки (после нажатия клавиши ЗВД) по ЛОК аналоговому входу AI2
Точка коррекции Хтк (ТК) определяется аналогично разделу 6.4.5.1.
Имеется возможность динамического изменения точки коррекции ТК, если установлено в 10.16=0001 тип коррекции = 1 (динамическая) см. п. 6.4.5.3
6.4.5.3 Пример расчета коэффициентов коррекции.
Например, нужно произвести коррекцию внутренней заданной точки, по сигналу со второго аналогового входа (температурная коррекция).
Задано:
1) Точка коррекции 60°С;
2) При изменении температуры (Ai2) на 010.0ºС значение внутренней заданной точки должно изменяться на 05.00 .
Устанавливаем значение параметра назначение аналогового входа Аi2 [10.13] = 0002 – коррекция заданной точки SP=SPвнутр.+ Кр*Х2 + В.
Произведем расчет коэффициента коррекции и смещения при коррекции:
Кр = (5 / 10) = 0.5
К = 0.5 * 10(2 – 1) = 5.00 – вводимое значение К в параметр [10.14] с учетом положений децимальных разделителей.
В = -0.5 * 60.0 = -30.00 – значение В ввести в параметр [10.15].
Проверка:
при Т = 060.0 ºС: SP = SPвнутр. + 0.5 * 60.0 – 30.00 = SPвнутр. + 0 - значение в точке коррекции;
при Т = 100.0 ºС: SP = SPвнутр. + 0.5 * 100.0 – 30.00 = SPвнутр. + 20.00 - значение при возрастании Т на 40°С
Для построения прямой коррекции допустим, что SPвнутр. =20°С, получим уравнение прямой коррекции SP=20+ 0.5*Х2 – 30 = 0.5*Х2 – 10 (прямая 1). Как видно из графика в точке коррекции SP =. SPвнутр. = 20°С.
В режиме статической коррекции заданной точки или измеряемого параметра, при изменении входа Х2 будет меняться скорректированное задание согласно прямой коррекции. Если изменить SPвнутр. = 40°С, то прямая коррекции сдвинется (прямая 2). Уравнение прямой коррекции при этом будет выглядеть SP= 0.5*Х2 + 10. Точка коррекции останется та же 60°С, то есть в точке коррекции SP =. SPвнутр. = 40°С. Потому данная коррекция будет статической.
В режиме динамической коррекции точка коррекции будет меняться каждый раз при включении данной коррекции. Коррекция будет включаться в случае перехода с передней панели с локальной рабочей точки или ручного режима работы на дистанционную рабочую точку ЛОКÆДСТ или РУЧÆДСТ. В момент включения динамической коррекции SP =. SPвнутр, соответственно Кр*Х2 + В = 0. Регулятор принимает текущее значение Х2 за точку коррекции и перещитывает смещение В. Если SPвнутр. = 20°С, Х2 = 100°С, то в момент включения динамической коррекции мы получим прямую коррекции 3, в этом случае В станет равно
В = -Кр*Х2 = -0.5*100 = -50, а уравнение прямой коррекции приобретет вид SP= 0.5*Х2 - 30
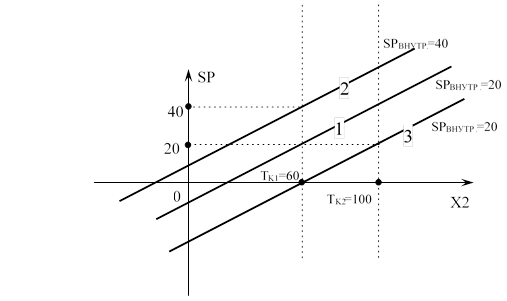
Рисунок 6.2 – Прямые статической и динамической коррекции параметра или заданной точки
6.5 Уровень конфигурации и настроек
● С помощью этого уровня вводят параметры и константы регулятора, параметры сигнализации отклонений, параметры фильтра, параметры задания типа входа, типа управления, вида заданной точки, параметры сетевого обмена, параметры калибровки, а также режимы разрешения входа в меню конфигурации и записи параметров.
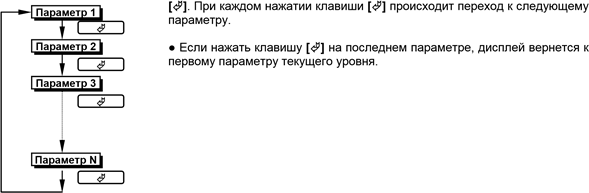
● Параметры разделены по группам, каждая из которых называется "уровень". Каждое заданное значение (элемент настройки) в этих уровнях называется "параметром". Параметры, используемые в регуляторе МИК-21-05, сгруппированы в следующие 19 уровней и представлены на диаграмме – см. рис 6.3. Индикация значения параметров конфигурации и их номеров указаны на рисунке 6.4.
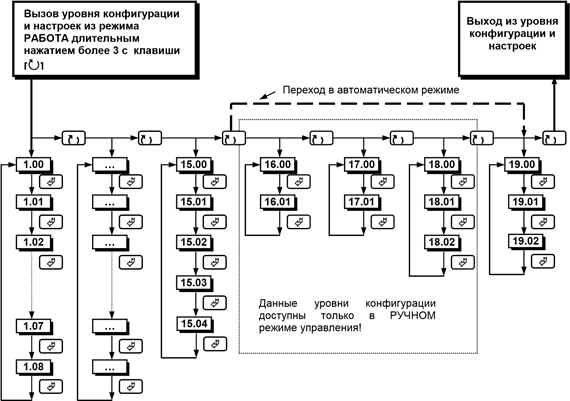
Рисунок 6.3 - Диаграмма уровней конфигурации и настроек.

Рисунок 6.4 - Индикация значения параметров конфигурации и их номеров.
6.5.1 Вызов уровня конфигурации и настроек
Вызов уровня конфигурации и настроек осуществляется из режима РАБОТА длительным, более 3-х секунд, нажатием клавиши [3]. Регулятор МИК-21-05 может находиться в одном из режимов – ручном или автоматическом. Отличие в количестве вызываемых уровней конфигурации в различных режимах – см. диаграмму приведенную на рисунке 6.3.
6.5.2 Назначение уровней конфигурации
|
Номер УРОВНЯ |
Назначение УРОВНЯ |
Доступ к УРОВНЮ в режимах |
|
|
В автоматическом |
В ручном |
||
|
1 |
Настройка параметров регулятора |
+ |
+ |
|
2 |
Конфигурация аналогового входа AI1 (параметр) |
+ |
+ |
|
3 |
Конфигурация аналогового входа AI2 (задание, положение механизма) |
+ |
+ |
|
4 |
Конфигурация дискретного выхода DO1 |
+ |
+ |
|
5 |
Конфигурация дискретного выхода DO2 |
+ |
+ |
|
6 |
Конфигурация дискретного выхода DO3 |
+ |
+ |
|
7 |
Конфигурация дискретного выхода DO4 |
+ |
+ |
|
8 |
Конфигурация дискретных входов |
+ |
+ |
|
9 |
Конфигурация аналогового выхода AO |
+ |
+ |
|
10 |
Конфигурация структуры регулятора |
+ |
+ |
|
11 |
Абсциссы опорных точек линеаризации входа AI1 |
+ |
+ |
|
12 |
Ординаты опорных точек линеаризации входа AI1 |
+ |
+ |
|
13 |
Абсциссы опорных точек линеаризации входа AI2 |
+ |
+ |
|
14 |
Ординаты опорных точек линеаризации входа AI2 |
+ |
+ |
|
15 |
Параметры сетевого обмена |
+ |
+ |
|
16 |
Калибровка входа AI1 |
- |
+ |
|
17 |
Калибровка входа AI2 |
- |
+ |
|
18 |
Калибровка аналогового выхода (AO) |
- |
+ |
|
19 |
Разрешение программирования. Запись. Типы панелей. |
+ |
+ |
6.5.3 Выбор параметров ● Для выбора параметров на каждом уровне необходимо нажать клавишу
|
6.5.4 Фиксирование настроек
|
● Чтобы изменить настройки параметров или установки, пользуйтесь клавишами [▲] или [▼], а затем нажмите клавишу [©]. В результате настройка будет зафиксирована. ● Необходимо помнить, что фиксация изменений происходит только по клавише [©]. ● Если на уровне конфигурации и настроек был вызван параметр для модификации и не нажималась ни одна из клавиш в течение около 2-х минут, прибор перейдет в режим РАБОТА. Даже если параметр был модифицирован и не нажималась клавиша [©], то в течение около 2-х минут, прибор перейдет в режим РАБОТА и изменение не будет зафиксировано. ● При переходе на другой уровень с помощью клавиши [3] параметр и настройка, измененные до перехода без нажатия клавиши [©], не фиксируются. ● Перед отключением питания следует сначала зафиксировать настройки или установки параметров (нажатием клавиши [©]). Настройки и установки параметров иногда невозможно изменить простым нажатием клавиш [▲] или [▼]. ● Необходимо помнить, что после проведения модификации необходимо произвести запись параметров (коэффициентов) в энергонезависимую память (см. раздел 6.5.5), в противном случае введенная информация не будет сохранена при отключении питания регулятора. |
6.5.5 Уровень разрешения входа в конфигурацию и запись параметров в
энергонезависимую память
1) Вызов уровня конфигурации и настроек осуществляется из режима РАБОТА длительным, более 3-х секунд, нажатием клавиши [3]. Пользователь получает доступ только к УРОВНЮ 1 (с наиболее часто используемыми оперативными параметрами).
2) Для перехода на УРОВНИ конфигурации 2-19 необходимо на УРОВНЕ 1 выбрать параметр 1.08 и с помощью клавиш [▲] и [▼] ввести пароль 0002. Нажать клавишу [©]. После этого, путем нажатия клавиши
[3], возможен вход на УРОВНИ 2 - 19.
3) При частом редактировании параметров, имеется возможность отключить уровень системы защиты (предназначенный для защиты от модификации параметров при случайном или нежелательном доступе) установкой параметра 19.00=0001.
Значение установочных параметров защиты следующие:
Параметр 19.00. Разрешение входа на УРОВНИ 2 - 19
|
Значение параметра 19.00 |
Доступные уровни |
|
0000 |
Вызов уровня конфигурации и настроек из режима РАБОТА осуществляется длительным более 3-х секунд нажатием клавиши [3], с доступом только на УРОВЕНЬ 1. |
|
0001 |
Разрешение программирования. Вызов уровня конфигурации и настроек из режима РАБОТА осуществляется длительным более 3-х секунд нажатием клавиши [3], с доступом на все УРОВНИ, без ввода пароля в параметре 1.07. |
Параметр 19.01. Запись параметров в энергонезависимую память
|
Значение параметра 19.01 |
Выполняемая операция |
|
0000 |
Запись параметров в энергонезависимую память не производится |
|
0001 |
Запись параметров в энергонезависимую память производится следующим образом:
1) Произвести модификацию всех необходимых параметров.
2) Установить значение параметра 19.01 = 0001.
3) Нажать клавишу [©].
4) На дисплее ЗАВДАННЯ появятся символы "ЗП", указывая о том, что происходит операция записи в энергонезависимую память.
5) После указанных операций будет произведена запись всех модифицированных параметров в энергонезависимую память. После проведения записи параметров прибор перейдет в режим РАБОТА. После записи параметр 19.01 автоматически устанавливается в 0000.
|
7 Коммуникационные функции
Микропроцессорный регулятор МИК-21-05 может обеспечить выполнение коммуникационной функции по интерфейсу RS-485, позволяющей контролировать и модифицировать его параметры при помощи внешнего устройства (компьютера, микропроцессорной системы управления).
Интерфейс предназначен для конфигурирования прибора, для использования в качестве удаленного контроллера при работе в современных сетях управления и сбора информации (приемапередачи команд и данных), SCADA системах и т.п..
Протоколом связи по интерфейсу RS-485 является протокол Modbus режим RTU (Remote Terminal
Unit).
Для работы необходимо настроить коммуникационные характеристики регулятора МИК-21-05 таким образом, чтобы они совпадали с настройками обмена данными главного компьютера. Характеристики сетевого обмена настраиваются на УРОВНЕ 15 конфигурации.
При обмене по интерфейсному каналу связи, если происходит передача данных от контроллера в сеть, на передней панели регулятора мигает индикатор ІНТ.
Программнодоступные регистры регулятора МИК-21-05 приведены в таблице 7.1 раздела 7.1.
Доступ к регистрам оперативного управления No 0-29 разрешен постоянно.
Доступ к регистрам программирования и конфигурации No 30-195 разрешается в случае установки в
«1» регистра разрешения программирования No 29, которое возможно осуществить как с передней панели регулятора МИК-21-05, так и с персональной ЭВМ.
Количество запрашиваемых регистров не должно превышать 16. Если в кадре запроса заказано более 16 регистров, регулятор МИК-21-05 в ответе ограничивает их количество до первых 16-ти регистров.
При программировании с ЭВМ необходимо контролировать диапазоны изменения значений параметров, указанные в таблице 7.1 раздела 7.1.
Для обеспечения минимального времени реакции на запрос от ЭВМ в контроллере существует параметр – 15.02. «Тайм-аут кадра запроса в системных тактах контроллера 1 такт = 250 мкс». Минимально возможные тайм-ауты для различных скоростей следующие:
|
Скорость, бит/с |
Время передачи кадра запроса, мсек |
Тайм-аут, в системных тактах 1 такт = 250 мкс (Time out [c.т.]) |
|
2400 |
36,25 |
145 |
|
4800 |
18,13 |
73 |
|
9600 |
9,06 |
37 |
|
14400 |
6,04 |
25 |
|
19200 |
4,53 |
19 |
|
28800 |
3,02 |
13 |
|
38400 |
2,27 |
10 |
|
57600 |
1,51 |
7 |
|
76800 |
1,13 |
5 |
|
115200 |
0,76 |
4 |
|
230400 |
0,38 |
3 |
|
460800 |
0,2 |
2 |
|
921600 |
0,1 |
1 |
Время передачи кадра запроса - пакета из 8-ми байт определяется соотношением (где: один передаваемый байт = 1 старт бит+ 8 бит + 1стоп бит = 10 бит):
(10 бит * 8 байт + 7 бит)
Тпередачи = 1000 * -------------------------------------- , мсек
V бит/сек
Если наблюдаются частые сбои при передаче данных от контроллера, то необходимо увеличить значение его тайм-аута, но при этом учесть, что необходимо увеличить время повторного запроса от ЭВМ, т.к. всегда время повторного запроса должно быть больше тайм-аута контроллера.
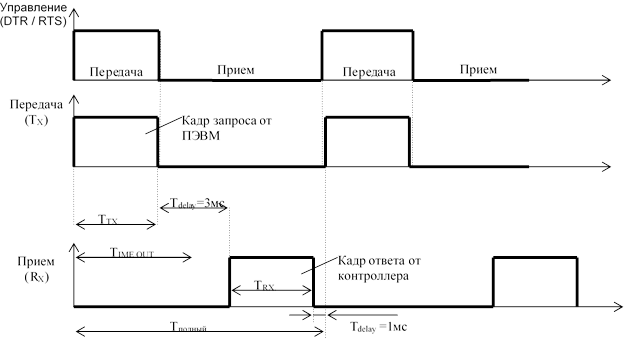
Рисунок 7.1 - Временные диаграммы управления передачей и приемом блока интерфейсов БПИ-485
Time out - время ожидания конца кадра запроса. Время передачи кадра запроса должно быть меньше чем время ожидания конца кадра запроса иначе контроллер не примет полностью кадр запроса. Тdelay – внутреннее время через которое МИК-21 ответит. Это время составляет 3мс.
Пример расчета полного времени запроса – ответа для скорости 115200 бит/с.
Время передачи кадра запроса и кадра ответа при скорости 115 кбит/с составит 0,76 мсек.
Тпередачи = 0,76мс (Тout = 4 системных такта = 1 мс) Полное время кадра запроса – ответа:
Тполный = ТТХ + Тdelay + ТRX + Тdelay. = 0,76 + 3 + 0,76 + 1 = 6 мс.
Итак, за 1 секунду можно опросить регистров:
N = 1000мc / 6мc +10 = 176.
Рекомендации по программированию обмена данными с регуляторами МИК.
(особенности использования функций WinAPI)
При операциях ввода / вывода (с программным управлением DTR/RTS), необходимо удерживать сигнал DTR/RTS до окончания передачи кадра запроса. Для определения момента передачи последнего символа из буфера передачи COM порта рекомендуется использовать данную функцию: WaitForClearBuffer.
void WaitForClearBuf(void)
{
byte Stat;
__asm {
a1:mov dx,0x3FD
in al,dx test al,0x20 jz a1 a2:in al,dx
test al,0x40
jz a2
}
}
Кадр ответа от регулятора передается регулятором с задержкой 3 – 9 мс от момента принятия кадра запроса. Для ожидания кадра ответа не рекомендуется использовать WinApi: Sleep( ), а использовать OVERLAPPED структуру и определять получение ответа от регулятора следующим кодом:
while(dwCommEvent!=EV_RXCHAR)
{
int tik=::GetTickCount();
::WaitCommEvent(DriverHandle,&dwCommEvent,&Rd2); TimeOut=TimeOut+(::GetTickCount()-tik); if (TimeOut>100) break;
}
ТimeOut – таймаут на получение ответа.
После передачи кадра ответа регулятору необходима пауза =1мс для переключения в режим приема. Для ожидания также не рекомендуется использовать функцию WinApi Sleep( ).
7.1 Таблица программнодоступных регистров регулятора МИК-21-05
Таблица 7.1 - Программнодоступные регистры регулятора МИК-21-05
|
Функциона льный код операции |
Адрес регистра |
Наименование параметра [Параметр уровня конфигурации] |
Диапазон изменения (десятичные значения) |
|
|
DEC |
HEX |
|||
|
03 |
0 |
0 |
Регистр идентификации изделия [15.03]: Мл.байт - код (модель) изделия 05 DEC, Ст.байт - версия прогр. обеспечения ХХ DEC |
ХХ.05 DEC (по-байтно) ХХ.05 HEX (по-байтно) |
|
03 |
1, 2 |
1, 2 |
Состояние дискретных входов DI1, DI2 |
0 – отключен, 1 – включен |
|
03 / 06 |
3 |
3 |
Значение аналогового входа AI1, параметр |
-9999 – 9999 |
|
03 / 06 |
4 |
4 |
Значение аналогового входа AI2, внеш.заданная точка, положение исполнительного механизма |
-9999 – 9999 |
|
03 / 06 |
5, 6, 7, 8 |
5, 6, 7, 8 |
Состояние дискретных выходов DO1 - DO4 |
0 – отключен, 1 – включен |
|
03 / 06 |
9 |
9 |
Значение управляющего воздействия, подаваемого на аналоговый выход АО регулятора |
0 – 999 |
|
03 / 06 |
10 |
A |
Режим работы регулятора |
0– ручной, 1– автоматич. |
|
03 / 06 |
11 |
B |
Флаг вида заданной точки |
0 – внутрен., 1 - внешняя |
|
03 / 06 |
12 |
C |
Внутренняя заданная точка |
-9999 – 9999 |
|
03 / 06 |
13 |
D |
Внешняя заданная точка |
-9999 – 9999 |
|
03 / 06 |
14 |
E |
Управление перемещением импульсного исполнительного механизма |
-100 – 100% |
|
03 |
15 |
F |
Положение механизма. 1) Внутренняя переменная слежения за выходом без обратной связи. 2) Вход AI2 с обратной связью |
0 – 999 |
|
03 / 06 |
16 |
10 |
Коэффициент усиления [1.00] |
1 – 500 |
|
03 / 06 |
17 |
11 |
Время интегрирования [1.01] |
0 – 6000 |
|
03 / 06 |
18 |
12 |
Время дифференцирования [1.02] |
0 – 6000 |
|
03 / 06 |
19, 20, 21, 22 |
13-16 |
Уставка MIN DO1-DO4 [4.02], [5.02], [6.02], [7.02] |
-9999 – 9999 |
|
03 / 06 |
23, 24, 25, 26 |
17-1А |
Уставка MAX DO1-DO4 [4.03], [5.03], [6.03], [7.03] |
-9999 – 9999 |
|
03 / 06 |
27 |
1В |
Условие запуска [1.07] |
0, 1, 2 |
|
03 |
28 |
1С |
Состояние ожидания запуска |
0 – отключен, 1 – включен |
|
03 / 06 |
29 |
1 D |
Разрешение программирования [19.00] |
0 – запрещено, 1 – разрешено |
|
03 / 06 |
30, 31 |
1Е, 1F |
Нижний предел размаха шкалы входов AI1, AI2 [2.05], [3.05] |
-9999 – 9999 |
|
03 / 06 |
32, 33 |
20, 21 |
Верхний предел размаха шкалы входов AI1, AI2 [2.06], [3.06] |
-9999 – 9999 |
|
03 / 06 |
34 |
22 |
Сигнализация отклонения MIN [1.04] |
-9999 – 9999 |
|
03 / 06 |
35 |
23 |
Сигнализация отклонения MAX [1.05] |
-9999 – 9999 |
|
03 / 06 |
36, 37 |
24,25 |
Положение децимального разделителя входов AI1, AI2 [2.04], [3.04] |
0 – «0,000», 1 – «00,00», 2 – «000,0», 3 – «0000» |
|
03 / 06 |
38, 39 |
26, 27 |
Тип шкалы аналоговых входов AI1, AI2 [2.00], [3.00] |
0 – 17 |
|
03 / 06 |
40, 41 |
28, 29 |
Тип аналоговых входов AI1, AI2 [2.01], [3.01] |
0 – 0-5мА, 0-20мА, 1 – 4-20мА |
|
03 / 06 |
42, 43 |
2A, 2B |
Постоянная времени цифрового фильтра аналоговых входов AI1, AI2 [2.03], [3.03] |
0 – 60 |
|
03 / 06 |
44, 45, 46, 47 |
2C, 2D 2E 2F |
Номер аналогового входа (источник аналогового сигнала) для управления дискретными выходами DO1, DO2, DO3, DO4 [4.00], [5.00], [6.00], [7.00] |
0 – аналоговый вход AI1 1 – аналоговый вход AI2 2 – рассогласов. регулятора 3 – задание регулятора 4 – выход аналогового регулятора |
|
03 / 06 |
48, 49, 50, 51 |
30 31 32 33 |
Значение аналогового входа (источника аналогового сигнала) для управления дискретными выходами DO1, DO2, DO3, DO4 |
-9999 – 9999 |
|
03 / 06 |
52, 53, 54, 55 |
34 35 36 37 |
Логика работы выходных устройств DO1, DO2, DO3, DO4 [4.01], [5.01], [6.01], [7.01] |
0 – 7 |
|
03 / 06 |
56, 57, 58, 59 |
38 39 3A 3B |
Гистерезис выходных устройств DO1, DO2, DO3, DO4 [4.04], [5.04], [6.04], [7.04] |
0 – 9999 |
|
03 / 06 |
60 |
3C |
Назначение дискретного входа DI1 [8.00] |
0 – 7 |
|
03 / 06 |
61 |
3D |
Назначение дискретного входа DI2 [8.01] |
0 – 7 |
|
03 / 06 |
62 |
3E |
Назначение аналогового входа AI2 [10.13] |
0 – 6 |
|
03 / 06 |
63 |
3F |
Источник аналогового сигнала для управления аналоговым выходом AO (функция ретрансмиссии) [9.00] |
0 – аналоговый вход AI1 1 – аналоговый вход AI2 2 – рассогласов. регулятора 3 – задание регулятора |
|
03 / 06 |
64 |
40 |
Направление и ограничение выходного сигнала АО для ретрансмиссии и аналогового ПИДрегулятора [9.03] |
0 – 4 |
Таблица 7.1 - Программнодоступные регистры регулятора МИК-21-05 (ОКОНЧАНИЕ)
|
Функциона льный код операции |
Адрес регистра |
Наименование параметра [Параметр уровня конфигурации] |
Диапазон изменения (десятичные значения) |
|
|
DEC |
HEX |
|||
|
03 / 06 |
65 |
41 |
Начальное значение входного сигнала равное 0% выходного сигнала АО [9.01] |
-9999 – 9999 |
|
03 / 06 |
66 |
42 |
Конечное значение входного сигнала равное 100% выходного сигнала АО [9.02] |
-9999 – 9999 |
|
03 / 06 |
67 |
43 |
Статическая балансировка [10.06] |
0 – отключена, 1 – включена |
|
03 / 06 |
68 |
44 |
Скорость динамической балансировки [10.07] |
0 – 999,9 |
|
03 / 06 |
69 |
45 |
Разрешение ограничения выхода [10.10] |
0 – АВТ, 1 – АВТ+РУЧ |
|
03 / 06 |
70 |
46 |
Ограничение МИН аналогового выхода (или аналоговой ячейки импульсного регулятора) [10.08] |
-9,9 – 109,9 |
|
03 / 06 |
71 |
47 |
Ограничение МАКС аналогового выхода (или аналоговой ячейки импульсного регулятора) [10.09] |
-9,9 – 109,9 |
|
03 / 06 |
72 |
48 |
Типы панелей индикации [19.02] |
0 – 2 |
|
03 / 06 |
73, 74 |
49 4A |
Значение калибровки нуля входов AI1, AI2 |
-9999 – 9999 |
|
03 / 06 |
75, 76 |
4B 4C |
Значение калибровки макс. входов AI1, AI2 |
-9999 – 9999 |
|
03 / 06 |
77 |
4D |
Задержка срабатывания ключей БОЛЬШЕ, МЕНЬШЕ [10.05] |
0,1 – 60,0 |
|
03 / 06 |
78 |
4E |
Тип регулятора [10.03] |
0 – 6 |
|
03 / 06 |
79 |
4F |
Тип управления регулятора [10.04] |
0000 – обратное (E=SP–PV) 0001 – прямое (E=PV–SP) |
|
03 / 06 |
80 |
50 |
Время механизма Тм, период ПИД-ШИМ [10.00] |
0 – 999,9 |
|
03 / 06 |
81 |
51 |
Миним. длительность импульса Тмин [10.01] |
0 – 999,9 |
|
03 / 06 |
82 |
52 |
Гистерезис технологической сигнализации, 2-х позицион. и 3-х позицион. регулятора [1.06] |
0 – 90,0 |
|
03 / 06 |
83 |
53 |
Значение калибровки нуля аналог. выхода AO [18.01] |
0 – 200 |
|
03 / 06 |
84 |
54 |
Значение калибровки макс. аналог. выхода AO [18.02] |
500 – 1500 |
|
03 / 06 |
85 |
55 |
Зона нечувствительности 3-х позиционного и ПИД-регулятора (мертвая зона) [10.02] |
0 – 999,9 |
|
03 / 06 |
86 |
56 |
Безопасное положение выхода регулятора в случае отказа датчика, линии связи или измерительного канала [10.11] |
0 – 3 |
|
03 / 06 |
87, 88, 89, 90 |
57 58 59 5A |
Безопасное положение выходных устройств DO1, DO2, DO3, DO4 в случае отказа датчика, линии [4.05], [5.05], [6.05], [7.05] |
0 – последнее положение 1 – откл. 2 – вкл. |
|
03 / 06 |
91 |
5B |
Значение безопасного положения АО устанавливаемого пользователем [10.12] |
0 – 99,9 |
|
03 / 06 |
92, 93 |
5C 5D |
Количество участков линеаризации входов AI1, AI2 [2.02], [3.02] |
0 – 19 |
|
03 / 06 |
94-113, 114-133 |
5E – 71 72 – 85 |
Абсциссы опорных точек линеаризации входов AI1, AI2 [11.00] - [11.19], [13.00] - [13.19] |
0 – 9999 |
|
03 / 06 |
134-153, 154-173 |
86 – 99 9A – AD |
Ординаты опорных точек линеаризации входов AI1, AI2 [12.00] - [12.19], [14.00] - [14.19] |
-9999 – 9999 |
|
03 / 06 |
174 |
AE |
Нижнее ограничение AI2 для входа предварения или коррекции [10.17] |
-9999 – 9999 |
|
03 / 06 |
175 |
AF |
Верхнее ограничение AI2 для входа предварения или коррекции [10.18] |
-9999 до 9999 |
|
03 / 06 |
176 |
B0 |
Тип технологической сигнализации [1.03] |
0 – абсолют., 1 – девиацион. |
|
03 / 06 |
177 |
B1 |
Коэффициент коррекции K [10.14] |
-9,9 – 99,99 |
|
03 / 06 |
178 |
B2 |
Смещение при коррекции B [10.15] |
-9999 – 9999 |
|
03 / 06 |
179 |
B3 |
Тип коррекции [10.16] |
0 – статическая, 1 – динамич. |
|
03 / 06 |
180-183 |
B4 – B7 |
Тип выходного сигнала выходных устройств DO1- DO4 (длительность импульса) [4.06], [5.06], [6.06], [7.06] |
0000 – 9999 |
|
03 / 06 |
184, 185 |
B8 B9 |
Допустимая длительность импульсной помехи [2.09], [3.09] |
0000 – 0050 |
|
03 / 06 |
186 |
BA |
Структура регулятора [10.19] |
0000, 0001 |
|
03 / 06 |
187, 188 |
BB, ВС |
Метод температурной коррекции термопар [2.07], [3.07] |
0000, 0001 |
|
03 / 06 |
189, 190 |
BD, BЕ |
Значение температуры для коррекции термопар [2.08], [3.08] |
-99,9 – 999,9 |
|
03 |
191 |
ВF |
Значение коррекции показаний датчика термокомпенсации [15.04] |
-9999 – 9999 |
|
03 |
192 |
С0 |
Служебная информация |
|
|
03 |
193 |
С1 |
Тайм-аут кадра запроса в системных такта [15.02] |
1 – 200 |
|
03 |
194 |
С2 |
Сетевой адрес (номер прибора в сети) [15.00] |
0 – 255 |
|
03 |
195 |
С3 |
Скорость обмена [15.01] |
0 – 12 |
Примечание. Регулятор МИК-21-05 обменивается данными по протоколу Modbus RTU в режиме "No Group Write" - стандартный протокол без поддержки группового управления дискретными сигналами.
7.2 MODBUS протокол
7.2.1 Формат каждого байта, который принимается и передается контроллерами следующий:
1 start bit, 8 data bits, 1 Stop Bit (No Parity Bit)
LSB (Least Significant bit) младший бит передается первым.
Кадр Modbus сообщения следующий:
|
DEVICE ADDRESS |
FUNCTION CODE |
DATA |
CRC CHECK |
|
8 BITS |
8 BITS |
k x 8 BITS |
16 BITS |
Где k≤16 – количество запрашиваемых регистров. Если в кадре запроса заказано более 16 регистров, регулятор МИК-21-05 в ответе ограничивает их количество до первых 16-ти регистров.
7.2.2 Device Address. Адрес устройства
Адресс регулятора (slave-устройства) в сети (1-255), по которому обращается SCADA система (master-устройство) со своим запросом. Когда удаленное устройство посылает свой ответ, оно размещает этот же (собственный ) адрес в этом поле, чтобы master-устройство знало какое slave-устройство отвечает на запрос.
7.2.3 Function Code. Функциональный код операции
МИК-21-05 поддерживает следующие функции:
|
Function Code |
Функция |
|
03 |
Чтение регистра(ов) |
|
06 |
Запись в один регистр |
7.2.4 Data Field. Поле передаваемых данных
Поле данных сообщения, посылаемого SCADA системой удаленному устройству содержит добавочною информацию, которая необходима slave-устройству для детализации функции. Она включает: ● начальный адрес регистра и количество регистров для функции 03 (чтение) ● адрес регистра и значение этого регистра для функции 06 (запись).
Поле данных сообщения, посылаемого в ответ удаленным контроллером содержит:
● количество байт ответа на функцию 03 и содержимое запрашиваемых регистров ● адрес регистра и значение этого регистра для функции 06.
7.2.5 CRC Check. Поле значения контрольной суммы
Значение этого поля - результат контроля с помощью циклического избыточного кода (Cyclical Redundancy Check -CRC).
После формирования сообщения (address, function code, data) передающее устройство рассчитывает CRC код и помещает его в конец сообщения. Приемное устройство рассчитывает CRC код принятого сообщения и сравнивает его с переданным CRC кодом. Если CRC код не совпадает, это означает что имеет место коммуникационная ошибка. Устройство не выполняет действий и не дает ответ в случае обнаружения CRC ошибки.
Последовательность CRC расчетов:
1.Загрузка CRC регистра (16 бит) единицами (FFFFh).
2.Исключающее ИЛИ с первыми 8 бит байта сообщения и содержимым CRC регистра.
3.Сдвиг результата на один бит вправо.
4.Если сдвигаемый бит = 1, исключающее ИЛИ содержимого регистра с A001h значением.
5.Если сдвигаемый бит нуль, повторить шаг 3.
6.Повторять шаги 3, 4 и 5 пока 8 сдвигов не будут иметь место.
7.Исключающее ИЛИ со следующими 8 бит байта сообщения и содержимым CRC регистра.
8.Повторять шаги от 3 до 7 пока все байты сообщения не обработаются.
9.Конечное содержимое регистра и будет значением контрольной суммы.
Когда CRC размещается в конце сообщения, младший байт CRC передается первым.
7.3 Пример расчета контрольной суммы (CRC)
Адрес устройства 06, операция чтение (код 03), начальный регистр 0008, число регистров 0001
Device address 06, read (03), starting register 0008, number of registers 0001
|
Расчет контрольной суммы. CRC Calculation |
|
|
Function code Two byte (16 bit) Register |
Overflow |
|
HB LB |
Bit |
![]()
|
Load 16 bit register to all 1 |
1111 |
1111 |
1111 |
1111 |
0 |
||
|
First byte is address 06 |
|
|
0000 |
0110 |
|
||
|
Exclusive OR |
|
1111 |
1111 |
1111 |
1001 |
|
|
|
1st shift |
|
0111 |
1111 |
1111 |
1100 |
1 |
|
|
A001 |
|
1010 |
0000 |
0000 |
0001 |
|
|
|
Exclusive OR |
|
1101 |
1111 |
1111 |
1101 |
|
|
|
2nd shift |
|
0110 |
1111 |
1111 |
1110 |
1 |
|
|
A001 |
|
1010 |
0000 |
0000 |
0001 |
|
|
|
Exclusive OR |
|
1100 |
1111 |
1111 |
1111 |
|
|
|
3rd shift |
|
0110 |
0111 |
1111 |
1111 |
1 |
|
|
A001 |
|
1010 |
0000 |
0000 |
0001 |
|
|
|
Exclusive OR |
|
1100 |
0111 |
1111 |
1110 |
|
|
|
4th shift |
|
0110 |
0011 |
1111 |
1111 |
0 |
|
|
5th shift |
|
0011 |
0001 |
1111 |
1111 |
1 |
|
|
A001 |
|
1010 |
0000 |
0000 |
0001 |
|
|
|
Exclusive OR |
|
1001 |
0001 |
1111 |
1110 |
|
|
|
6th shift |
|
0100 |
1000 |
1111 |
1111 |
0 |
|
|
7th shift |
|
0010 |
0100 |
0111 |
1111 |
1 |
|
|
A001 |
|
1010 |
0000 |
0000 |
0001 |
|
|
|
Exclusive OR |
|
1000 |
0100 |
0111 |
1110 |
|
|
|
8th shift |
|
0100 |
0010 |
0011 |
1111 |
0 |
|
|
Second byte Read 03 |
|
|
|
0000 |
0011 |
|
|
|
Exclusive OR |
|
0100 |
0010 |
0011 |
1100 |
|
|
|
1st shift |
|
0010 |
0001 |
0001 |
1110 |
0 |
|
|
2nd shift |
|
0001 |
0000 |
1000 |
1111 |
0 |
|
|
3rd shift |
|
0000 |
1000 |
0100 |
0111 |
1 |
|
|
A001 |
|
1010 |
0000 |
0000 |
0001 |
|
|
|
Exclusive OR |
|
1010 |
1000 |
0100 |
0110 |
|
|
|
4th shift |
|
0101 |
0100 |
0010 |
0011 |
0 |
|
|
5th shift |
|
0010 |
1010 |
0001 |
0001 |
1 |
|
|
A001 |
|
1010 |
0000 |
0000 |
0001 |
|
|
|
Exclusive OR |
|
1000 |
1010 |
0001 |
0000 |
|
|
|
6th shift |
|
0100 |
0101 |
0000 |
1000 |
0 |
|
|
7th shift |
|
0010 |
0010 |
1000 |
0100 |
0 |
|
|
8th shift |
|
0001 |
0001 |
0100 |
0010 |
0 |
|
|
Third byte Starting reg 00 |
|
|
0000 |
0000 |
|
||
|
Exclusive OR |
|
0001 |
0001 |
0100 |
0010 |
|
|
|
1st shift |
|
0000 |
1000 |
1010 |
0001 |
0 |
|
|
2nd shift |
|
0000 |
0100 |
0101 |
0000 |
1 |
|
|
A001 |
|
1010 |
0000 |
0000 |
0001 |
|
|
|
Exclusive OR |
|
1010 |
0100 |
0101 |
0001 |
|
|
|
3rd shift |
|
0101 |
0010 |
0010 |
1000 |
1 |
|
|
A001 |
|
1010 |
0000 |
0000 |
0001 |
|
|
|
Exclusive OR |
|
1111 |
0010 |
0010 |
1001 |
|
|
|
4th shift 40.41 |
|
0111 |
1001 |
0001 |
0100 |
1 |
|
|
A001 |
|
1010 |
0000 |
0000 |
0001 |
|
|
|
Function code |
|
Two byte (16 bit) Register |
Overflow |
||||
|
|
|
HB LB |
Bit |
||||
|
Exclusive OR |
|
1101 1001 0001 0101 |
|
||||
|
5th shift |
|
0110 1100 1000 1010 |
1 |
||||
|
A001 |
|
1010 0000 0000 0001 |
|
||||
|
Exclusive OR |
|
1100 1100 1000 1011 |
|
||||
|
6th shift |
|
0110 0110 0100 0101 |
1 |
||||
|
A001 |
|
1010 0000 0000 0001 |
|
||||
|
Exclusive OR |
|
1100 0110 0100 0100 |
|
||||
|
7th shift |
|
0110 0011 0010 0010 |
0 |
||||
|
8th shift |
|
0011 0001 1001 0001 |
0 |
||||
|
Fourth Byte 08 |
|
|
|
0000 |
1000 |
|
|
|
Exclusive OR |
|
|
0011 |
0001 |
1001 |
1001 |
|
|
1st shift |
|
|
0001 |
1000 |
1100 |
1100 |
1 |
|
A001 |
|
|
1010 |
0000 |
0000 |
001 |
|
|
Exclusive OR |
|
|
1011 |
1000 |
1100 |
1101 |
|
|
2nd shift |
|
|
0101 |
1100 |
0110 |
0110 |
1 |
|
A001 |
|
|
1010 |
0000 |
0000 |
0001 |
|
|
Exclusive OR |
|
|
1111 |
1100 |
0110 |
0111 |
|
|
3rd shift |
|
|
0111 |
1110 |
0011 |
0011 |
1 |
|
A001 |
|
|
1010 |
0000 |
0000 |
0001 |
|
|
Exclusive OR |
|
|
1101 |
1110 |
0011 |
0010 |
|
|
4th shift |
|
|
0110 |
1111 |
0001 |
1001 |
0 |
|
5th shift |
|
|
0011 |
0111 |
1000 |
1100 |
1 |
|
A001 |
|
|
1010 |
0000 |
0000 |
0001 |
|
|
Exclusive OR |
|
|
1001 |
0111 |
1000 |
1101 |
|
|
6th shift |
|
|
0100 |
1011 |
1100 |
0110 |
1 |
|
A001 |
|
|
1010 |
0000 |
0000 |
0001 |
|
|
Exclusive OR |
|
|
1110 |
1011 |
1100 |
0111 |
|
|
7th shift |
|
|
0111 |
0101 |
1110 |
0011 |
1 |
|
A001 |
|
|
1010 |
0000 |
0000 |
0001 |
|
|
Exclusive OR |
|
|
1101 |
0101 |
1110 |
0010 |
|
|
8th shift |
|
|
0110 |
1010 |
1111 |
0001 |
0 |
|
Fifth Byte 00 |
|
|
|
|
0000 |
0000 |
|
|
Exclusive OR |
|
|
0110 |
1010 |
1111 |
0001 |
|
|
1st shift |
|
|
0011 |
0101 |
0111 |
1000 |
1 |
|
A001 |
|
|
1010 |
0000 |
0000 |
0001 |
|
|
Exclusive OR |
|
|
1001 |
0101 |
0111 |
1001 |
|
|
2nd shift |
|
|
0100 |
1010 |
1011 |
1100 |
1 |
|
A001 |
|
|
1010 |
0000 |
0000 |
0001 |
|
|
Exclusive OR |
|
|
1110 |
1010 |
1011 |
1101 |
|
|
3rd shift |
|
|
0111 |
0101 |
0101 |
1110 |
1 |
|
A001 |
|
|
1010 |
0000 |
0000 |
0001 |
|
|
Exclusive OR |
|
|
1101 |
0101 |
0101 |
1111 |
|
|
4th shift |
|
|
0110 |
1010 |
1010 |
1111 |
1 |
|
A001 |
|
|
1010 |
0000 |
0000 |
0001 |
|
|
Exclusive OR |
|
|
1100 |
1010 |
1010 |
1110 |
|
|
5th shift |
|
|
0110 |
0101 |
0101 |
0111 |
0 |
|
6th shift |
|
|
0011 |
0010 |
1010 |
1011 |
1 |
|
A001 |
|
|
1010 |
0000 |
0000 |
0001 |
|
|
Exclusive OR |
|
|
1001 |
0010 |
1010 |
1010 |
|
|
7th shift |
|
|
0100 |
1001 |
0101 |
0101 |
0 |
|
8th shift |
|
|
0010 |
0100 |
1010 |
1010 |
1 |
|
A001 |
|
|
1010 |
0000 |
0000 |
0001 |
|
|
Exclusive OR |
|
|
1000 |
0100 |
1010 |
1011 |
|
|
Sixth Byte 01 |
|
|
|
|
0000 |
0001 |
|
|
Exclusive OR |
|
|
1000 |
0100 |
1010 |
1010 |
|
|
1st shift |
|
|
0100 |
0010 |
0101 |
0101 |
0 |
|
2nd shift |
|
|
0010 |
0001 |
0010 |
1010 |
1 |
|
A001 |
|
|
1010 |
0000 |
0000 |
0001 |
|
|
Function code |
|
|
Two byte (16 bit) Register |
Overflow |
|||
|
|
|
|
HB LB |
Bit |
|||
|
Exclusive OR |
|
|
1000 0001 0010 1011 |
|
|||
|
3rd shift |
|
|
0100 0000 1001 0101 |
1 |
|||
|
A001 |
|
|
1010 0000 0000 0001 |
|
|||
|
Exclusive OR |
|
|
1110 0000 1001 0100 |
|
|||
|
4th shift |
|
|
0111 0000 0100 1010 |
0 |
|||
|
5th shift |
|
|
0011 1000 0010 0101 |
0 |
|||
|
6th shift |
|
|
0001 1100 0001 0010 |
1 |
|||
|
A001 |
|
|
1010 0000 0000 0001 |
|
|||
|
Exclusive OR |
|
|
1011 1100 0001 0011 |
|
|||
|
7th shift |
|
|
0101 1110 0000 1001 |
1 |
|||
|
A001 |
|
|
1010 0000 0000 0001 |
|
|||
|
Exclusive OR |
|
|
1111 1110 0000 1000 |
|
|||
|
8th shift |
|
|
0111 1111 0000 0100 |
0 |
|||
|
CRC code |
|
|
7 F 0 4 |
|
|||
Передаваемое сообщение. Transmitted Message:
|
DEVICE ADDRESS |
FUNCTION CODE |
STARTING REGISTER |
NUMBER OF REGISTERS |
CRC |
|
06 |
03 |
00 08 |
00 01 |
04 7F |
Где «NUMBER OF REGISTERS» ≤16 – количество запрашиваемых регистров. Если в кадре запроса заказано более 16 регистров, регулятор МИК-21-05 в ответе ограничивает их количество до первых 16-ти регистров.
Пример расчета контрольной суммы на языке СИ
Example of CRC calculation in "C" language
unsigned int crc_calculation (unsigned char *buff, unsigned char number_byte)
{
unsigned int crc; unsigned char bit_counter;
|
crc = 0xFFFF;
while ( number_byte>0 ) { |
|
// initialize crc |
|
crc ^= *buff++ ; |
|
// crc XOR with data |
|
bit_counter=0; |
|
// reset counter |
while ( bit_counter < 8 )
{
if ( crc & 0x0001 )
{
crc >>= 1; // shift to the right 1 position crc ^= 0xA001; // crc XOR with 0xA001 }
|
else { |
|
|
crc >>=1; } |
// shift to the right 1 position |
|
bit_counter++; }
|
// increase counter |
|
number_byte--; }
|
// adjust byte counter |
|
return (crc); } |
// final result of crc |
7.4 Формат команд
Чтение нескольких регистров. Read Multiple Register (03 )
Следующий формат используется для передачи запросов от компьютера и ответов от удаленного контроллера.
Запрос устройству SENT TO DEVICE:
|
DEVICE ADDRESS |
FUNCTION CODE 03 |
DATA |
CRC |
|
|
STARTING REGISTERS |
NUMBER OF REGISTERS |
|||
|
1 BYTE |
1 BYTE |
HB LB |
HB LB |
LB HB |
Ответ устройства. RETURNED FROM DEVICE:
|
DEVICE ADDRESS |
FUNCTION CODE 03 |
|
DATA |
|
|
CRC |
|
NUMBER OF BYTES |
FIRST REGISTER |
… |
N REGISTER |
|||
|
1 BYTE |
1 BYTE |
1 BYTE |
HB LB |
... |
HB LB |
LB HB |
Где «NUMBER OF REGISTERS» и n ≤16 – количество запрашиваемых регистров. Если в кадре запроса заказано более 16 регистров, регулятор МИК-21-05 в ответе ограничивает их количество до первых 16-ти регистров.
Пример 1:
1.Чтение регистра
Запрос устройству. SENT TO DEVICE: Address 1, Read (03) register 1 (Setpoint)
|
DEVICE ADDRESS |
FUNCTION CODE |
DATA |
CRC |
|
|
STARTING REGISTERS |
NUMBER OF REGISTERS |
|||
|
01 |
03 |
00 01 |
00 01 |
D5 CA |
Ответ устройства. RETURNED FROM DEVICE: Setpoint set to 100.0
|
DEVICE ADDRESS |
FUNCTION CODE |
NUMBER OF BYTES |
VALUE OF REGISTERS |
CRC |
|
01 |
03 |
02 |
03 E8 |
B8 FA |
03E8 Hex = 1000 Dec
2.Запись в регистр
Следующая команда записывает определенное значение в регистр. Write to Single Register (06)
Запрос и Ответ устройства. Sent to/Return from device :
|
DEVICE ADDRESS |
FUNCTION CODE 06 |
D |
ATA |
|
CRC |
|
REGISTER |
|
DATA/ VALUE |
|||
|
1 BYTE |
1 BYTE |
HB LB |
|
HB LB |
LB HB |
Пример 2:
Установить время дифференцирования регулятора 74 секунды в устройстве с адресом 20. Set Td to 74 sec ( 004A Hex ) on Device address 20.
Запрос устройству. SEND TO DEVICE: Address 20 (Hex 14), write (06) to register 8, data 4A
|
DEVICE ADDRESS |
FUNCTION CODE |
D |
ATA |
|
CRC |
|
REGISTER |
|
DATA/ VALUE |
|||
|
14 |
06 |
00 08 |
|
00 4A |
8B 3A |
Ответ устройства. RETURNED FROM DEVICE:
|
DEVICE ADDRESS |
FUNCTION CODE |
D |
ATA |
|
CRC |
|
REGISTER |
|
DATA/ VALUE |
|||
|
14 |
06 |
00 08 |
|
00 4A |
8B 3A |
8 Указание мер безопасности
8.1 К эксплуатации регулятора МИК-21-05 допускаются лица, имеющие разрешение для работы на электроустановках напряжением до 1000 В и изучившие руководство по эксплуатации в полном объеме.
8.2 Эксплуатация регулятора МИК-21-05 разрешается при наличии инструкции по технике безопасности, утвержденной предприятием-потребителем в установленном порядке и учитывающей специфику применения регулятора на конкретном объекте. При эксплуатации необходимо соблюдать требования действующих правил ПТЭ и ПТБ для электроустановок напряжением до 1000В.
8.3 Регулятор МИК-21-05 должен эксплуатироваться в соответствии с требованиями действующих "Правил устройства электроустановок" (ПУЭ).
8.4 Используйте напряжения питания (220В/50Гц переменного тока), соответствующие требованиям к электропитанию для регулятора МИК-21-05. При подаче напряжения питания необходимое его значение должно устанавливаться не более, чем за 2-3 сек.
8.5 Все монтажные и профилактические работы должны проводиться при отключенном электропитании.
8.6 Запрещается подключать и отключать соединители при включенном электропитании.
8.7 Тщательно производите подключение с соблюдением полярности выводов. Неправильное подключение или подключение разъемов при включенном питании может привести к повреждению электронных компонентов прибора.
8.8 Не подключайте неиспользуемые выводы.
8.9 При разборке прибора для устранения неисправностей регулятор МИК-21-05 должен быть отключен от сети электропитания.
8.10 При извлечении прибора из корпуса не прикасайтесь к его электрическим компонентам и не подвергайте внутренние узлы и части ударам.
8.11 Располагайте регулятор МИК-21-05 как можно далее от устройств, генерирующих высокочастотные излучение (например, ВЧ-печи, ВЧ-сварочные аппараты, машины, или приборы использующие импульсные напряжения) во избежание сбоев в работе.
9 Порядок установки и монтажа
9.1 Требования к месту установки
9.1.1 Регулятор МИК-21-05 рассчитан на монтаж на вертикальной панели электрощитов.
9.1.2 Регулятор должен устанавливаться в закрытом взрывобезопасном и пожаробезопасном помещении. Используйте прибор при температуре и влажности, отвечающих требованиям и условиям эксплуатации указанным в главе 3 настоящего руководства.
9.1.3 Не загромождайте пространство вокруг устройства для нормального теплообмена. Отведите достаточно места для естественной вентиляции устройства. Не закрывайте вентиляционные отверстия на корпусе устройства. Если прибор подвергается нагреванию, для его охлаждения до температуры ниже 50°С, используйте вентилятор.
9.1.4 Габаритные и присоединительные размеры регулятора МИК-21-05 приведены в приложении А.
9.2 Соединение с внешними устройствами. Входные и выходные цепи
9.2.1 ВНИМАНИЕ!!! При подключении регулятора МИК-21-05 соблюдать указания мер безопасности раздела 8 настоящего руководства.
9.2.2 Кабельные связи, соединяющие регулятор МИК-21-05, подключаются через клеммные колодки соответствующих клеммно-блочных соединителей в соответствии с требованиями действующих "Правил устройства электроустановок".
9.2.3 Подключение входов-выходов к регулятору МИК-21-05 производят в соответствии со схемами внешних соединений, приведенных в приложении Б.
9.2.4 При подключении линий связи к входным и выходным клеммам принимайте меры по уменьшению влияния наведенных шумов: используйте входные и (или) выходные шумоподавляющие фильтры для регулятора (в т.ч. сетевые), шумоподавляющие фильтры для периферийных устройств, используйте внутренние цифровые фильтры аналоговых входов регулятора МИК-21-05.
9.2.5 Не допускается объединять в одном кабеле (жгуте) цепи, по которым передаются аналоговые, интерфейсные сигналы и сильноточные сигнальные или сильноточные силовые цепи. Для уменьшения наведенного шума отделите линии высокого напряжения или линии, проводящие значительные токи, от других линий, а также избегайте параллельного или общего подключения с линиями питания при подключении к выводам.
9.2.6 Необходимость экранирования кабелей, по которым передается информация, зависит от длины кабельных связей и от уровня помех в зоне прокладки кабеля. Рекомендуется использовать изолирующие трубки, каналы, лотки или экранированные линии.
9.2.7 Применение экранированной витой пары в промышленных условиях является предпочтительным, поскольку это обеспечивает получение высокого соотношения сигнал/шум и защиту от синфазной помехи.
9.2.8 Подключайте стабилизаторы или шумоподавляющие фильтры к периферийным устройствам, генерирующим электромагнитные и импульсные помехи (в частности, моторам, трансформаторам, соленоидам, магнитным катушкам и другим устройствам, имеющим излучающие компоненты).
9.3 Подключение электропитания блоков
9.3.1. ВНИМАНИЕ!!! При подключении электропитания регулятора соблюдать указания мер безопасности раздела 8 настоящего руководства.
9.3.2. Для обеспечения стабильной работы оборудования колебания напряжения и частоты питающей электросети должны находиться в пределах технических требований, указанных в разделе 3, а для каждого составляющего компонента системы – в соответствии с их руководствами по эксплуатации. При необходимости, для непрерывных технологических процессов, должна быть предусмотрена защита от отключения (или выхода из строя) системы подачи электропитания – установкой источников бесперебойного питания.
9.3.3. Для регуляторов с исполнением для питания от сети переменного тока 220В провода электропитания сети переменного тока 220В подключаются разьемным соединителем, расположенным на задней панели регулятора.
9.3.4. Устанавливая шумоподавляющий фильтр (сигнальный или сетевой), обязательно уточните его параметры (используемое напряжение и пропускаемые токи). Располагайте фильтр как можно ближе к регулятору.
10 Подготовка к работе. Порядок работы
10.1 Подготовка к работе
Подключение входов-выходов к регулятору МИК-21-05 производят в соответствии со схемами внешних соединений, приведенных в приложении Б.
10.2 Конфигурация прибора
Регулятор представляет собой свободно программируемый компактный прибор. Пользователь, не имеющий знаний и навыков программирования, может просто вызывать и исполнять различные функции путем конфигурации регулятора МИК-21-05. Регуляторы МИК-21-05 очень гибкие в использовании и могут быстро и легко, изменивши конфигурацию, выполнить большинство встречаемых требований и задач управления технологическими процессами.
Регуляторы МИК-21-05 конфигурируются через переднюю панель прибора или через гальванически разделенный интерфейс RS-485 (протокол ModBus), что также позволяет использовать прибор в качестве удаленного контроллера при работе в современных сетях управления и сбора информации.
Параметры конфигурации регулятора МИК-21-05 сохраняются в энергонезависимой памяти и прибор способен возобновить выполнение задач управления после прерывания напряжения питания. Батарея резервного питания не используется.
Программа конфигурации регулятора МИК-21-05 должна быть составлена заранее и оформлена в виде таблицы (см. приложение В), что избавит пользователя от ошибок при вводе параметров конфигурации. Назначение элементов передней панели, назначение светодиодных индикаторов и клавиш представлено в соответствующих разделах главы 5. Порядок конфигурации изложен в главе 6.
10.2.1 Порядок настройки аналоговых входов
При настройке и перестройке с одного типа входного сигнала на другой тип, необходимо привести в соответствие следующее:
-параметры меню конфигурации, отвечающие типу входного сигнала,
-положения перемычек на клеммно-блочном соединителе,
-положения перемычек на модуле универсальных входов (установленном внутри прибора). Типы входных сигналов, и положения перемычек приведены в таблице 10.1.
Таблица 10.1 – Положения перемычек для разных типов входных сигналов
|
Тип входного сигнала |
Код входа при заказе изделия |
Параметр меню конфигурации |
Положение перемычек на КБЗ-25-11, КБЗ-28Р-11, КБЗ-28К-11, КБЗ-28С-11 |
Положение перемычек на модуле универсальных входов (рис.10.1) |
|
|
|
Аналоговый вход AI1 |
|
|
|
0-5 мА Rвх=400 Ом |
01 |
[2.00]=0000, [2.01]=0000 |
JP1 [1-2], [7-8] |
J1 [3-4], J3 [5-6] |
|
0-20 мА, Rвх=100 Ом |
02 |
[2.00]=0000, [2.01]=0000 |
JP1 [1-2], [5-6] |
J1 [3-4], J3 [5-6] |
|
4-20 мА, Rвх=100 Ом |
03 |
[2.00]=0000, [2.01]=0001 |
JP1 [1-2], [5-6] |
J1 [3-4], J3 [5-6] |
|
0-10В, Rвх=27 кОм |
04 |
[2.00]=0000, [2.01]=0000 |
JP1 [2-4], [5-7] |
J1 [3-4], J3 [5-6] |
|
0-75 мВ |
05 |
[2.00]=0000, [2.01]=0000 |
JP1 [1-2], [5-7] |
J1 [3-4], J3 [1-2] |
|
0-200 мВ |
06 |
[2.00]=0000, [2.01]=0000 |
JP1 [1-2], [5-7] |
J1 [3-4], J3 [3-4] |
|
0-2 В |
07 |
[2.00]=0000, [2.01]=0000 |
JP1 [1-2], [5-7] |
J1 [3-4], J3 [5-6] |
|
ТСМ 50М, -50 … +200°С |
08 |
[2.00]=0002 |
JP1 [1-2], [5-7] |
J1 [1-2], J3 [3-4] |
|
ТСМ 100М, -50 … +200°С |
09 |
[2.00]=0003 |
JP1 [1-2], [5-7] |
J1 [1-2], J3 [3-4] |
|
ТСМ гр.23, -50 … +180°С |
10 |
[2.00]=0004 |
JP1 [1-2], [5-7] |
J1 [1-2], J3 [3-4] |
|
ТСП 50П, Pt50, -50 … +650°С |
11 |
[2.00]=0005 |
JP1 [1-2], [5-7] |
J1 [1-2], J3 [3-4] |
|
ТСП 100П, Pt100, -50 … +650°С |
12 |
[2.00]=0006 |
JP1 [1-2], [5-7] |
J1 [1-2], J3 [3-4] |
|
ТСП гр.21, -50 … +650°С |
13 |
[2.00]=0007 |
JP1 [1-2], [5-7] |
J1 [1-2], J3 [3-4] |
|
ТЖК (J), 0 ... +1100°С |
16 |
[2.00]=0010 |
JP1 [1-2], [5-7] |
J1 [3-4], J3 [1-2] |
|
ТХК (L), 0°…+800°C |
15 |
[2.00]=0011 |
JP1 [1-2], [5-7] |
J1 [3-4], J3 [1-2] |
|
ТХКн (E), 0 ... +850°С |
17 |
[2.00]=0012 |
JP1 [1-2], [5-7] |
J1 [3-4], J3 [1-2] |
|
ТХА (K), 0 ... +1300°С |
14 |
[2.00]=0013 |
JP1 [1-2], [5-7] |
J1 [3-4], J3 [1-2] |
|
ТПП10 (S), 0 ... +1600°С |
18 |
[2.00]=0014 |
JP1 [1-2], [5-7] |
J1 [3-4], J3 [1-2] |
|
ТПР (B), 0 ... +1800°С |
19 |
[2.00]=0015 |
JP1 [1-2], [5-7] |
J1 [3-4], J3 [1-2] |
|
ТВР-1 (А-1), 0 ... +2500°С |
20 |
[2.00]=0016 |
JP1 [1-2], [5-7] |
J1 [3-4], J3 [1-2] |
Продолжение таблицы 10.1 – Положения перемычек для разных типов входных сигналов
|
|
|
Аналоговый вход AI2 |
|
|
|
0-5 мА Rвх=400 Ом |
01 |
[3.00]=0000, [3.01]=0000 |
JP2 [1-2], [7-8] |
J2 [3-4], J4 [5-6] |
|
0-20 мА, Rвх=100 Ом |
02 |
[3.00]=0000, [3.01]=0000 |
JP2 [1-2], [5-6] |
J2 [3-4], J4 [5-6] |
|
4-20 мА, Rвх=100 Ом |
03 |
[3.00]=0000, [3.01]=0001 |
JP2 [1-2], [5-6] |
J2 [3-4], J4 [5-6] |
|
0-10В, Rвх=27 кОм |
04 |
[3.00]=0000, [3.01]=0000 |
JP2 [2-4], [5-7] |
J2 [3-4], J4 [5-6] |
|
0-75 мВ |
05 |
[3.00]=0000, [3.01]=0000 |
JP2 [1-2], [5-7] |
J2 [3-4], J4 [1-2] |
|
0-200 мВ |
06 |
[3.00]=0000, [3.01]=0000 |
JP2 [1-2], [5-7] |
J2 [3-4], J4 [3-4] |
|
0-2 В |
07 |
[3.00]=0000, [3.01]=0000 |
JP2 [1-2], [5-7] |
J2 [3-4], J4 [5-6] |
|
ТСМ 50М, -50 … +200°С |
08 |
[3.00]=0002 |
JP2 [1-2], [5-7] |
J2 [1-2], J4 [3-4] |
|
ТСМ 100М, -50 … +200°С |
09 |
[3.00]=0003 |
JP2 [1-2], [5-7] |
J2 [1-2], J4 [3-4] |
|
ТСМ гр.23, -50 … +180°С |
10 |
[3.00]=0004 |
JP2 [1-2], [5-7] |
J2 [1-2], J4 [3-4] |
|
ТСП 50П, Pt50, -50 … +650°С |
11 |
[3.00]=0005 |
JP2 [1-2], [5-7] |
J2 [1-2], J4 [3-4] |
|
ТСП 100П, Pt100, -50 … +650°С |
12 |
[3.00]=0006 |
JP2 [1-2], [5-7] |
J2 [1-2], J4 [3-4] |
|
ТСП гр.21, -50 … +650°С |
13 |
[3.00]=0007 |
JP2 [1-2], [5-7] |
J2 [1-2], J4 [3-4] |
|
ТЖК (J), 0 ... +1100°С |
16 |
[3.00]=0010 |
JP2 [1-2], [5-7] |
J2 [3-4], J4 [1-2] |
|
ТХК (L), 0°…+800°C |
15 |
[3.00]=0011 |
JP2 [1-2], [5-7] |
J2 [3-4], J4 [1-2] |
|
ТХКн (E), 0 ... +850°С |
17 |
[3.00]=0012 |
JP2 [1-2], [5-7] |
J2 [3-4], J4 [1-2] |
|
ТХА (K), 0 ... +1300°С |
14 |
[3.00]=0013 |
JP2 [1-2], [5-7] |
J2 [3-4], J4 [1-2] |
|
ТПП10 (S), 0 ... +1600°С |
18 |
[3.00]=0014 |
JP2 [1-2], [5-7] |
J2 [3-4], J4 [1-2] |
|
ТПР (B), 0 ... +1800°С |
19 |
[3.00]=0015 |
JP2 [1-2], [5-7] |
J2 [3-4], J4 [1-2] |
|
ТВР-1 (А-1), 0 ... +2500°С |
20 |
[3.00]=0016 |
JP2 [1-2], [5-7] |
J2 [3-4], J4 [1-2] |
Примечания.
1. Положение перемычек на клеммно-блочном соединителе для настройки аналоговых входов должно соответствовать положению перемычек на аналоговом входе на плате процессора, а также соответствовать номеру параметра меню конфигурации аналогового входа отвечающего за тип входного сигнала.
2. Смещение входного сигнала 4-20мА устанавливается программно.
3. Характеристики типов входных сигналов приведены в разделе 3.
4. Порядок калибровки входных аналоговых сигналов приведен в разделе 11.
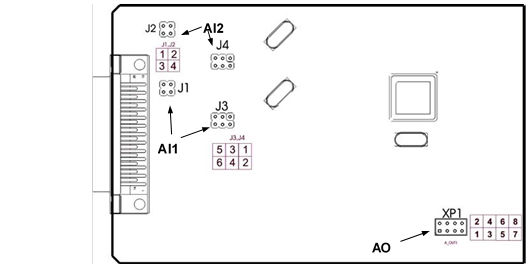
Рисунок 10.1 – Положение перемычек на плате процесора
10.3. Режим РАБОТА
После выполнения операций конфигурации, регулятор переводят в режим РАБОТА (см. главу 6) нажимая клавишу [3]. Этот переход также осуществляется автоматически по истечении около 2-х минут, даже если параметры не были модифицированы и не нажималась ни одна клавиша, прибор перейдет в режим РАБОТА. В режиме РАБОТА происходит измерение и обработка входных сигналов по заданной программе, а также формирование выходного управляющего воздействия.
Для восстановления параметров настройки предприятия изготовителя (установка значений поумолчанию) необходимо:
● отключить питание регулятора,
● нажать клавишу [©],
● удерживая нажатой клавишу [©] включить питание, ● отпустить клавишу [©].
После проведения данной операции необходимо произвести сохранение параметров по-умолчанию в энергонезависимой памяти (см. раздел 6.5.5).
Внимание! Необходимо помнить, что данная функция не имеет обратного действия.
10.4 Передаточная функция ПИД-регулятора МИК-21-05
Регулятор МИК-21-05 построен таким образом, что в процессе работы в каждый момент времени t на выходе регулятора будет формироваться воздействие Y(t) в зависимости от входного сигнала регулятора E(t) – рассогласование между входным параметром PV и заданием регулятора SP.
Зависимость между входным сигналом регулятора E(t) и выходным Y(t) определяет передаточная функция регулятора. Алгоритм преобразования регулятора содержит три составляющие регулятора: пропорциональная (П-составляющая), интегральная (И-составляющая) и дифференциальная (Дсоставляющая).
В зависимости от условного размещения этих составляющих внутри регулятора будет определяться его структура ([10.19]=0000 – параллельная, [10.19]=0001 – смешанная) и передаточная функция.
Алгоритмические схемы ПИД-регулятора МИК-21-05 в случае параллельной и смешанной структуры показаны на рисунке 10.2.
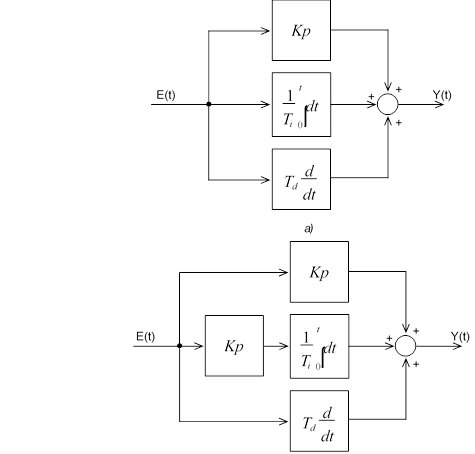
б)
Рисунок 10.2 – Структуры ПИД регуляторов МИК-21-05:
а – параллельная структура ПИД регулятора; б – смешанная структура ПИД регулятора.
Согласно рисунка 10.2 для параллельной структуры регулятора передаточная функция имеет вид:
1 t dE t( )
Y t( ) = Kp E t⋅ ( ) + ![]() ∫E t dt( ) +Td
∫E t dt( ) +Td ![]() ,
,
Tі 0 dt
для смешанной структуры регулятора передаточная функция имеет вид:
Kp t dE t( )
Y t( ) = Kp E t⋅ ( ) + ![]() ∫E t dt( ) +Td
∫E t dt( ) +Td ![]() ,
,
Tі 0 dt
где Кр – коэффициент пропорциональности регулятора (параметр меню конфигурации [1.00]), Ті – время интегрирования регулятора (параметр меню конфигурации [1.01]), ТД – время дифференцирования регулятора (параметр меню конфигурации [1.02]).
То есть при использовании смешанной структуры регулятора в сравнении с параллельной Ті уменьшается в Кр раз.
10.5 Ручная установка параметров регулирования по переходной функции
объекта регулирования
Если задана переходная функция объекта регулирования или она может быть определена, то параметры регулирования могут быть установлены согласно установочным директивам, указанным в справочниках. Переходная функция в положении регулятора «Ручной режим» может быть записана через скачкообразное изменение управляющего воздействия и характер регулируемой величины может регистрироваться самописцем. При этом получается переходная функция, приблизительно соответствующая указанной на рисунке 10.3.
Хорошие средние величины из установочных параметров регулятора дают следующие эмпирические формулы:
П - регулятор:
Коэффициент усиления Kp ≈ L / [D * KO]
ПИ - регулятор:
Коэффициент усиления Kp ≈ 0,8 * ( L / [ D * KO] )
Время интегрирования TИ ≈ 3 * D
ПИД - регулятор:
Коэффициент усиления Kp ≈ 1,2 * ( L / [ D * KO ] )
Время интегрирования TИ ≈ D
Время дифференцирования TD ≈ 0,4 * D
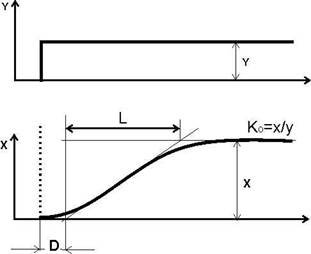
Рисунок 10.3 - Переходная функция объекта регулирования с самовыравниванием
Y – управляющее воздействие у – управляющее воздействие x – регулируемая величина
t – время
D – время задержки
L - время выравнивания
KO – передаточный коэффициент объекта регулирования.
10.6 Ручная настройка параметров импульсного итерационного П-регулятора
Импульсный итерационный П-регулятор предназначен для управления инерционными технологическими объектами. При правильной настройке данный регулятор обеспечивает оптимальную скорость управления при отсутствии перерегулирования, что является очень важной особенностью для большинства тепловых объектов.
Итерационный П-регулятор используется совместно с импульсным исполнительным механизмом. Данный регулятор имеет 4 основных параметра настройки:
-Коэффициент усиления Кр,
-Период обработки данных Трегул,
-Максимальная длительность импульса Тмакс, - Зона нечувствительности (мертвая зона) ∆.
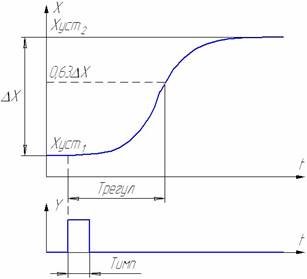
Рисунок 10.4 - Переходная характеристика объекта управления
(реакция объекта на перемещение регулирующего органа импульсным исполнительным механизмом)
Значение коэффициента усиления Кр определяется коэффициентом передачи технологического объекта:
Kp = (0.8…1.2) · Ko.
При этом, коэффициент передачи объекта рассчитывается по его переходной характеристике (рисунок 10.4):
Ko = ∆X / ∆Y, где:
∆X = Xуст2 – Хуст1;
∆Y = (Тимп / Тм) · 100%.
Период обработки данных итерационным регулятором Трегул определяет время между предыдущим и последующим управляющими импульсами. В это время регулятор анализирует характер рассогласования системы (его абсолютное значение, направление и скорость изменения), и по полученным результатам определяет длительность управляющего импульса и его направление (на закрытие или открытие регулирующего органа исполнительным механизмом). Длительность импульса не будет превышать заданного оператором значения Тмакс.
Значение периода обработки данных Трегул следует выбирать также по переходной характеристике объекта (рисунок 10.4).
Максимальную длительность импульса Тмакс рекомендуется принимать близкой или равной времени механизма Тм.
Зона нечувствительности (мертвая зона) ∆ итерационного П-регулятора определяется исходя из необходимой точности регулирования. Расширение мертвой зоны ведет к ухудшению точности регулирования и к уменьшению числа срабатываний импульсного исполнительного механизма. С другой стороны, чрезмерное сужение зоны нечувствительности может значительно увеличить число перемещений регулирующего органа исполнительным механизмом вплоть до получения незатухающего колебательного переходного процесса.
Переходной процесс в системе с импульсным итерационным П-регулятором отображен на ри- сунке 10.5.
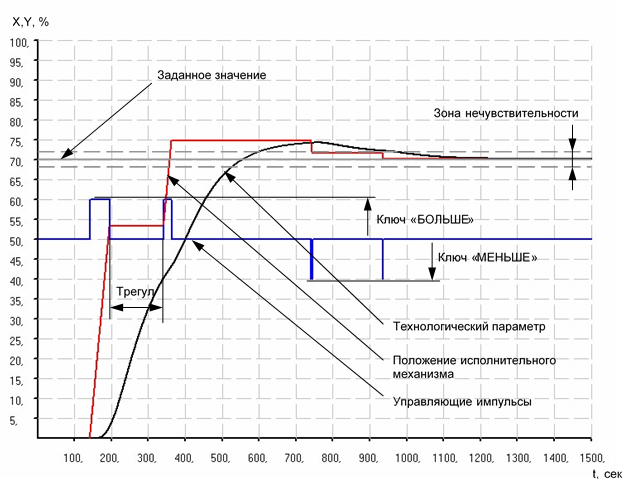
Рисунок 10.5 - Переходной процесс в системе с импульсным итерационным П-регулятором
11. Калибровка и проверка прибора
Калибровка прибора осуществляется: ● На заводе-изготовителе при выпуске прибора ● Пользователем:
-при смене типа датчика (переконфигурации прибора)
-при замене датчика
-при изменении длины линий связи
Внимание!!! Вход на уровни калибровок 16, 17, и 18 меню конфигурации возможен только для ручного режима работы регулятора.
11.1. Калибровка аналоговых входов
11.1.1. Порядок калибровки унифицированных входов
В режиме конфигурации установите параметры соответствующие:
-типу шкалы аналогового входа AI1 – 2.00
-типу аналогового входа AI1 – 2.01
-Положение децимального разделителя – 2.04
-Нижний предел размаха шкалы – 2.05
-Верхний предел размаха шкалы – 2.06
Например, установлены параметры унифицированного входа AI1:
-2.00=0000 и 2.01=0000 соответствующие (0-5, 0-20мА).
Ручная калибровка
1) В режиме конфигурации установите параметр 16.00 "Калибровка нуля аналогового входа AI1 (параметр)". Подключите к аналоговому входу AI1 регулятора МИК-21-05 образцовый источник постоянного тока согласно схеме внешних соединений (см. приложение Б1, Б.2). Установите величину сигнала равную 0 мА (или 4 мА) в зависимости от исполнения канала, соответствующую 0% диапазона. Нажимая клавиши [▲] или [▼] установите на дисплее ПАРАМЕТР значение в технических единицах, соответствующее 0%. Нажать клавишу [©]. См. раздел 11.1.4 Типы датчиков и рекомендуемые пределы калибровки.
2) Автоматически установится параметр 16.01 "Калибровка максимума аналогового входа AI1 (параметр)". Установите величину сигнала равную 5 мА (или 20 мА) в зависимости от исполнения канала, соответствующую 100% диапазона. Нажимая клавиши [▲] или [▼] установите на дисплее ПАРАМЕТР значение в технических единицах, соответствующее 100,0%. Нажать клавишу [©]. 3) Для более точной калибровки канала повторите операцию 1 и 2 несколько раз.
Автоматическая калибровка
1) В режиме конфигурации установите параметр 16.00. При нажатии клавиши ЗВД включается автоматическая калибровка, что сопровождается миганием параметра 00 (при калибровке нуля). При мигании 00 на дисплее ЗАВДАННЯ нужно подать на вход сигнал который соответствует началу шкалы и нажать клавишу ВВІД. Клавиша ВВІД фиксирует новое значение калибровки.
2) Потом нажать клавишу ЗВД. На индикаторе начнет мигать 01 (при калибровке максимума). Подайте на вход сигнал который соответствует концу шкалы. Нажмите клавишу ВВІД для запоминания значения калибровки. Калибровку рекомендовано пройти два раза.
Установив параметры входа AI2 уровня 3, аналогично произведите калибровку аналогового входа AI2 (внешняя заданная точка). Параметры калибровки аналогового входа AI2 17.00 - 17.01.
Необходимо помнить, что после проведения калибровки необходимо произвести запись параметров (коэффициентов калибровки) в энергонезависимую память (см. раздел 6.5.5), в противном случае введенная информация не будет сохранена при отключении питания регулятора.
11.1.2. Порядок калибровки входов для подключения датчиков термометров сопротивления ТСМ 50М
1)В параметрах конфигурации, уровень 2 установить:
Тип шкалы аналогового входа AI1 2.00=0002
2)Подключить магазин сопротивлений Р4830/1 (или аналогичный прибор с аналогичными характеристиками не хуже указанных) к входу AI1 вместо подключаемого датчика термопреобразователя сопротивления согласно схеме внешних соединений (см. приложение Б.4, Б.5).
3)На магазине сопротивлений установить значение сопротивления для выбранного типа датчика 39,225 Ом, соответствующее начальному значению при калибровке. Нажать клавишу [©]. См. раздел 11.1.4 Типы датчиков и рекомендуемые пределы калибровки.
4)В режиме конфигурации установите параметр 16.00 "Калибровка начала шкалы входа AI1". Нажимая клавиши [▲] или [▼] установите на дисплее значение, соответствующее температуре начала шкалы при калибровке "-50,0˚С". Нажать клавишу [©].
5)Автоматически установится параметр 16.01 "Калибровка конца шкалы входа AI1".
6)На магазине сопротивлений установить конечное значение сопротивления при калибровке для выбранного типа датчика 92,775 Ом.
7)Нажимая клавиши [▲] или [▼] установите на дисплее значение, соответствующее концу шкалы при калибровке "200,0˚С". Нажать клавишу [©].
8)Для более точной калибровки канала повторите операции 3 - 7 несколько раз.
11.1.3. Калибровка входа для подключения датчиков термометров сопротивления ТСМ 100М, ТСП 100П, ТСП 50П и термопар
Калибровка входа производится аналогично калибровке входа ТСМ 50М, за исключением установки иных значений начала и конца шкалы для ТСП, начальных и конечных значений сопротивлений на магазине сопротивления.
Для термопар при калибровке устанавливается начало и конец шкалы на МИК-21 и начальные и конечные значения напряжений от калибратора напряжения которые им соответствуют (см. раздел 11.1.4 Типы датчиков и рекомендуемые пределы калибровки).
11.1.4. Типы датчиков и рекомендуемые пределы калибровки
Таблица 11.1.4. Типы датчиков и рекомендуемые пределы калибровки
|
Код входа
Параметр АІ1 – 2.00 АІ2 – 3.00 |
Тип датчика |
Градуировочная характеристика и НСХ |
Предельные индицируемые значения при калибровке прибора |
Предельные значения входного сигнала при калибровке прибора |
Положение перемычек на плате входов |
||
|
Начал. значение |
Конечное значение |
АІ1 – J1 |
J3 |
||||
|
АІ2 – J2 |
J4 |
||||||
|
0000 |
0-5 мА 0-20 мА 4-20 мА 0-10 В 0-2 В 0-75 мВ 0-200 мВ |
Линейная |
0,0 ... 100,0 % или в установленных технических единицах |
0 мА 0 мА 4 мА 0 В 0 В 0 мВ 0 мВ |
5 мА 20 мА 20 мА 10 В 2 В 75 мВ 200 мВ |
[3-4] |
[5-6] [5-6] [5-6] [5-6] [5-6] [1-2] [3-4] |
|
0001 |
0-5 мА 0-20 мА 4-20 мА 0-10 В 0-2 В 0-75 мВ 0-200 мВ |
Квадратичная
(Вход калибруется как линейный, затем устанавливается квадратичная шкала) |
0,0 ... 100,0 % или в установленных технических единицах |
0 мА 0 мА 4 мА 0 В 0 В 0 мВ 0 мВ |
5 мА 20 мА 20 мА 10 В 2 В 75 мВ 200 мВ |
[3-4] |
[5-6] [5-6] [5-6] [5-6] [5-6] [1-2] [3-4] |
|
0002 |
ТСМ |
50M, W100=1,428 |
-50,0 ºС... +200,0 ºС |
39,225 ом |
92,775 ом |
[1-2] |
[3-4] |
|
0003 |
ТСМ |
100М, W100=1,428 |
-50,0 ºС... +200,0 ºС |
78,450 ом |
185,550 ом |
[3-4] |
|
|
0004 |
ТСМ |
Гр.23 |
-50,0 ºС... +180,0 ºС |
41,710 ом |
93,640 ом |
[3-4] |
|
|
0005 |
ТСП |
50П, W100=1,391, Pt50 |
-50,0 ºС... +650,0 ºС |
40,000 ом |
166,615 ом |
[3-4] |
|
|
0006 |
ТСП |
100П, W100=1,391, Pt100 |
-50,0 ºС... +650,0 ºС |
80,000 ом |
333,230 ом |
[3-4] |
|
|
0007 |
ТСП |
Гр.21 |
-50,0 ºС... +650,0 ºС |
36,800 ом |
153,300 ом |
[3-4] |
|
|
0008 |
0-5 мА 0-20 мА 4-20 мА 0-10 В 0-2 В 0-75 мВ 0-200 мВ |
Линеаризованная
(Вход калибруется как линейный, затем устанавливается линеаризованная шкала, см. раздел 11.2) |
0,0 ... 100,0 % или в установленных технических единицах |
0 мА 0 мА 4 мА 0 В 0 В 0 мВ 0 мВ |
5 мА 20 мА 20 мА 10 В 2 В 75 мВ 200 мВ |
[3-4] |
[5-6] [5-6] [5-6] [5-6] [5-6] [1-2] [3-4] |
|
0009 |
Термопара |
Линеаризованная (Вход калибруется как линейный, затем устанавливается линеаризованная шкала, см. раздел 11.2) |
* диапазон термопары |
* |
* |
[3-4] |
[1-2] |
|
0010 |
Термопара ТЖК (J) |
ТЖК (J) |
0 … +1100°С |
0 мВ |
63,792 мВ |
[3-4] |
[1-2] |
|
0011 |
Термопара ТХК (L) |
ТХК (L) |
0 … +800°С |
0 мВ |
66,442 мВ |
[3-4] |
[1-2] |
|
0012 |
Термопара ТХКн (E) |
ТХКн (E) |
0 … +850°С |
0 мВ |
64,922 мВ |
[3-4] |
[1-2] |
|
0013 |
Термопара ТХА (K) |
ТХА (K) |
0 … +1300°С |
0 мВ |
52,410 мВ |
[3-4] |
[1-2] |
|
0014 |
Термопара ТПП10 (S) |
ТПП10 (S) |
0 … +1600°С |
0 мВ |
16,777 мВ |
[3-4] |
[1-2] |
|
0015 |
Термопара ТПР (B) |
ТПР (B) |
0 … +1800°С |
0 мВ |
13,591 мВ |
[3-4] |
[1-2] |
|
0016 |
Термопара ТВР-1 (А-1) |
ТВР-1 (А-1) |
0 … +2500°С |
0 мВ |
33,647 мВ |
[3-4] |
[1-2] |
Примечание. Назначение перемычек:
1. J1 и J3 – аналоговый вход AI1, J2 и J4 – аналоговый вход AI2.
2. Если ко входу подключается термопара (2.00, 3.00=0009-0016), то в регуляторе есть возможность компенсации сигнала свободных концов термопары. (См. Приложение В – меню конфигурации п. 2.07, 2.08, 3.07, 3.08).
11.2. Линеаризация аналоговых входов AI1 и AI2
Функция линеаризации подчинена аналоговым входам AI1 и AI2. Линеаризация дает возможность правильного физического представления нелинейных регулируемых и измеряемых параметров.
* С помощью линеаризации можно производить, например, калибровку емкостей в литрах, метрах кубических или килограммах продукта, в зависимости от измеренного входного сигнала уровня в емкости.
При индикации линеаризируемой величины входа AI1 и AI2, определяющими параметрами являются начало и конец шкалы (процентное отношение к диапазону измерения), положение децимального разделителя, а также эквидистантные опорные точки линеаризации. Кривая линеаризации имеет «преломления» в опорных точках.
11.2.1. Параметры линеаризации входа AI1 и AI2
Например, параметры линеаризации входа AI1 следующие (для входа AI2 аналогично):
Уровень 2. Конфигурация аналогового входа AI1
[2.00] =0008 - Тип шкалы аналогового входа AI1 - линеаризованная
[2.01] Тип входа AI1
[2.02] Количество участков линеаризации входа AI1
[2.04] Положение децимального разделителя при индикации входа AI1
Уровень 11. Абсциссы опорных точек линеаризации входа AI1
[11.00] Абсцисса начального значения (в % от входного сигнала)
[11.01] Абсцисса 01-го участка [11.02] Абсцисса 02-го участка
……
[11.18] Абсцисса 18-го участка [11.19] Абсцисса 19-го участка
Уровень 12. Ординаты опорных точек линеаризации входа AI1
[12.00] Ордината начального значения (сигнал в технических единицах от -9999 до 9999)
[12.01] Ордината 01-го участка
[12.02] Ордината 02-го участка
……
[12.18] Ордината 18-го участка
[12.19] Ордината 19-го участка
11.2.2. Определение опорных точек линеаризации
11.2.2.1. Определение количества опорных точек линеаризации.
Определить и задать необходимое количество опорных точек линеаризации в параметре [2.02]. Пределы изменения параметра [2.02] от 0000 до 0019.
Выбор необходимого количества опорных точек линеаризации производится из соображения обеспечения необходимой точности измерения.
11.2.2.2. Определение значений опорных точек линеаризации.
Для каждого значения индицируемого входного сигнала Yi (в технических единицах от –9999 до 9999 с учетом децимального разделителя) вычислить соответствующую физическую величину из соответствующих функциональных (градуировочных) таблиц или графически из соответствующей кривой (при необходимости интерполировать) и задать значение для соответствующей опорной величины входного физического сигнала Xi (в %, от 00,00% до 99,99%).
Соответствующие значения Xi (в %, от 00,00% до 99,99%) вводятся в параметрах на уровне 11:
Уровень 11. Абсциссы опорных точек линеаризации входа AI1
[11.00] Абсцисса начального значения (в % от входного сигнала)
[11.01] Абсцисса 01-го участка [11.02] Абсцисса 02-го участка
……
[11.18] Абсцисса 18-го участка [11.19] Абсцисса 19-го участка
Соответствующие значения Yi (в технических единицах от –9999 до 9999 с учетом децимального разделителя) вводятся в параметрах на уровне 12:
Уровень 12. Ординаты опорных точек линеаризации входа AI1
[12.00] Ордината начального значения (сигнал в технических единицах от -9999 до 9999)
[12.01] Ордината 01-го участка
[12.02] Ордината 02-го участка
……
[12.18] Ордината 18-го участка
[12.19] Ордината 19-го участка
11.2.3. Примеры линеаризации сигналов
Пример 1.
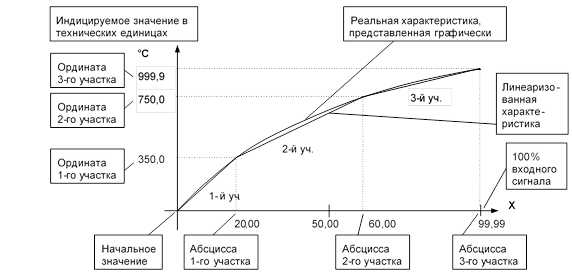
Рисунок 11.1. Линеаризация сигнала, подаваемого на вход AI1, представленная графически (кривой)
Конфигурируемые параметры для примера 1:
|
[2.00] = 0008 |
|
[11.00] = 00,00 |
|
[12.00] = 0000 (индицируется «000,0») |
|
[2.02] = 0003 |
|
[11.01] = 20,00 |
|
[12.01] = 3500 (индицируется «350,0») |
|
[2.04] = 000,0 |
|
[11.02] = 60,00 |
|
[12.02] = 7500 (индицируется «750,0») |
|
|
|
[11.03] = 99,99 |
|
[12.03] = 9999 (индицируется «999,9») |
Пример 2. Линеаризация сигнала, подаваемого на вход AI1, представленная градуировочной таблицей
Линеаризация сигнала снимаемого с термопары градуировки ТПП68, и подаваемого на вход AI1, диапазон измеряемых температур 0 - 1400°С, диапазон входного сигнала 0 - 14,315 мВ (0 – 100%).
Для обеспечения необходимой точности измерения выбираем 16 участков линеаризации и рассчитанные значения в % входного сигнала для каждой опорной точки вводятся в соответствующий параметр уровней 11 и 12.
Конфигурируемые параметры для примера 2:
[2.00] = 0008 Тип шкалы аналогового входа AI1 - линеаризованная
[2.02] = 0016 Количество участков линеаризации входа AI1
[2.04] = 0000, Положение децимального разделителя при индикации входа AI1
Параметры уровней 11 и 12 рассчитываются и вводятся согласно таблицы 11.2.
Таблица 11.2. Расчет и ввод параметров линеаризации примера 2.
|
Номер опорной точки |
Значение измеряемой температуры, °С |
Значение входного сигнала в мВ |
Параметры уровня 12
Ординаты опорных точек линеаризации входа AI1 |
Параметры уровня 11
Абсциссы опорных точек линеаризации входа AI1 |
||
|
Номер параметра |
Вводимое значение, °С |
Номер параметра |
Вводимое значение, % |
|||
|
0 |
0 |
0,000 |
[12.00] |
0000 |
[11.00] |
00,00 |
|
1 |
50 |
0,297 |
[12.01] |
0050 |
[11.01] |
02,07 |
|
2 |
100 |
0,644 |
[12.02] |
0100 |
[11.02] |
04,50 |
|
3 |
150 |
1,026 |
[12.03] |
0150 |
[11.03] |
07,17 |
|
4 |
200 |
1,436 |
[12.04] |
0200 |
[11.04] |
10,03 |
|
5 |
300 |
2,314 |
[12.05] |
0300 |
[11.05] |
16,16 |
|
6 |
400 |
3,250 |
[12.06] |
0400 |
[11.06] |
22,70 |
|
7 |
500 |
4,216 |
[12.07] |
0500 |
[11.07] |
29,45 |
|
8 |
600 |
5,218 |
[12.08] |
0600 |
[11.08] |
36,45 |
|
9 |
700 |
6,253 |
[12.09] |
0700 |
[11.09] |
43,68 |
|
10 |
800 |
7,317 |
[12.10] |
0800 |
[11.10] |
51,11 |
|
11 |
900 |
8,416 |
[12.11] |
0900 |
[11.11] |
58,79 |
|
12 |
1000 |
9,550 |
[12.12] |
1000 |
[11.12] |
66,71 |
|
13 |
1100 |
10,714 |
[12.13] |
1100 |
[11.13] |
74,84 |
|
14 |
1200 |
11,904 |
[12.14] |
1200 |
[11.14] |
83,16 |
|
15 |
1300 |
13,107 |
[12.15] |
1300 |
[11.15] |
91,56 |
|
16 |
1400 |
14,315 |
[12.16] |
1400 |
[11.16] |
99,99 |
11.3. Калибровка аналогового выхода
Перед началом калибровки аналогового выхода необходимо привести в соответствие положение перемычек на плате процессора прибора. Типы выходных сигналов и положение перемычек приведены в таблице в приложении Б.6.
Уровень калибровки аналогового выхода имеет три параметра. Параметр 18.00 используется для индикации аналогового выхода в %. Если регулятор МИК-21 находится в ручном режиме, то в этом пункте можна также производить изменения состояния аналогового выхода АО.
Пункты 18.01 и 18.02 используются для калибровки нуля и максимума аналогового выхода. Порядок калибровки следующий:
1) Подключите к аналоговому выходу AO регулятора МИК-21-05 образцовый измерительный прибор – миллиамперметр постоянного тока.
2) В режиме конфигурации установите параметр 18.01 "Калибровка нуля аналогового выхода AO".
3) Нажимая клавиши [▲] или [▼] установите величину выходного сигнала сигнала по миллиамперметру равную 0 мА (или 4 мА), соответствующую 0% диапазона, в зависимости от исполнения канала.
4) Нажать клавишу [©].
5) Автоматически установится параметр 18.02 "Калибровка максимума аналогового выхода AO"
6) Нажимая клавиши [▲] или [▼] установите величину выходного сигнала сигнала по миллиамперметру равную 5 мА (или 20 мА), соответствующую 100% диапазона, в зависимости от исполнения канала.
7) Нажать клавишу [©].
8) Автоматически установится параметр 18.00 "Тест аналогового выхода AO".
9) Нажать клавишу [©].
10) Для более точной калибровки канала циклически повторите операцию 2 - 9 несколько раз.
Необходимо помнить, что после проведения калибровки необходимо произвести запись параметров (коэффициентов калибровки) в энергонезависимую память (см. разделы 6.5.3 - 6.5.5), в противном случае введенная информация не будет сохранена при отключении питания регулятора.
ЗАМЕЧАНИЯ ПО ОПЕРАЦИЯМ КАЛИБРОВКИ
В процессе ручной калибровки не требуется точного равенства сигналов 0% и 100% диапазона.
Например, можно проводить калибровку для сигналов 2% и 98% диапазона. Важно лишь то, чтобы по цифровому индикатору установить значение, максимально близкое к установленному значению входного или выходного сигнала.
Для повышения точности измерения входных аналоговых сигналов, а также формирования выходных аналоговых сигналов, допускается калибровку производить для всей цепи преобразования сигнала с учетом вторичных преобразователей.
Например, для входной цепи: датчик – преобразователь – регулятор МИК-21-05 источник образцового сигнала подключается вместо датчика, а операция калибровки входного сигнала производится на регуляторе МИК-21-05. Аналогично для выходной цепи: регулятор МИК-21-05 – преобразователь – исполнительный механизм, измерительный прибор подключить вместо исполнительного механизма, а операцию калибровки выходного сигнала произвести с регулятора МИК-21-05.
12. Техническое обслуживание
12.1. При правильной эксплуатации регулятор МИК-21-05 не требует повседневного обслуживания.
12.2. Периодичность профилактических осмотров и ремонтов регулятора МИК-21-05 устанавливается в зависимости от производственных условий, но не реже двух раз в год.
12.3. При длительных перерывах в работе рекомендуется отключать регулятор МИК-21-05 от сети электропитания.
12.4. Во время профилактических осмотров: проверять и чистить кабельные части соединений (вскрытие регулятора МИК-21-05 не допускается); клеммно-блочные соединители, проверять прочность крепления блока, монтажных жгутов; проверять состояние заземляющих проводников в местах соединений.
12.5. Очистка прибора. Не используйте растворители и подобные вещества. Для очистки устройства пользуйтесь спиртом.
13. Транспортирование и хранение
13.1. Транспортирование регулятора МИК-21-05 допускается только в упаковке предприятияизготовителя и может производится любым видом транспорта.
13.2. При получении регулятора МИК-21-05 убедиться в полной сохранности тары.
13.3. После транспортирования регулятора МИК-21-05 необходимо выдержать в помещении с нормальными условиями не менее 6-ти часов, только после этого произвести распаковку.
13.4. Предельный срок хранения - один год.
13.5. Регуляторы МИК-21-05 должны храниться в сухом отапливаемом и вентилируемом помещении при температуре окружающего воздуха от +5°С до +40°С и относительной влажности от 30 до 80% (без конденсации влаги). Данные требования являются рекомендуемыми.
13.6. Воздух в помещении не должен содержать пыли и примеси агрессивных паров и газов, вызывающих коррозию (в частности: газов, содержащих сернистые соединения или аммиак).
13.7 В процессе хранении или эксплуатации не кладите тяжелые предметы на регулятор МИК-21-05 и не подвергайте его никакому механическому воздействию, так как устройство может деформироваться и повредиться.
14. Гарантии изготовителя
14.1. Гарантийный срок устанавливается 24 месяца со дня продажи регулятора МИК-21-05. Для регуляторов, которые поставляются на экспорт, гарантийный срок эксплуатации – 18 месяцев со дня следования их через Государственную границу Украины.
14.2. Изготовитель гарантирует соответствие регулятора МИК-21-05 техническим условиям ТУ У 33.2-13647695-003-2003 при соблюдении условий хранения, транспортирования, монтажа и эксплуатации, указанных в руководстве по эксплуатации на регуляторы МИК-21-05. При несоблюдении потребителем данных требований потребитель лишается права на гарантийный ремонт регуляторов МИК-21-05.
14.3. По договоренности с потребителем предприятие-изготовитель осуществляет послегарантийное техническое обслуживание, техническую поддержку и технические консультации по всем видам своей продукции.
ПРИЛОЖЕНИЯ
Приложение А - Габаритные и присоединительные размеры
Размеры индикаторов (дисплеев): ПАРАМЕТР ЗАВДАННЯ, ВИХIД
![]()
![]()
![]() 10
10
8
6 4,5
Рисунок А.1 – Внешний вид микропроцессорного регулятора
Вид Вид Вид
сзади сбоку спереди
![]()
![]()
![]() 96
96
Рекомендуемая толщина щита от 1 до 5 мм.
Рисунок А.2 - Габаритные размеры
Разметка отверстий на щите
![]() 150 min
150 min
Рисунок А.3 - Разметка отверстий на щите
Приложение Б - Подключение прибора. Схемы внешних соединений
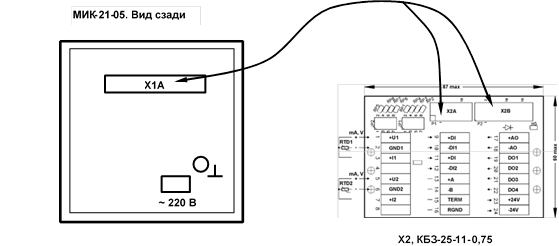
Рисунок Б.1 - Подключение клеммно-блочного соединителя КБЗ-25-11-0,75 к регулятору МИК-21-
05
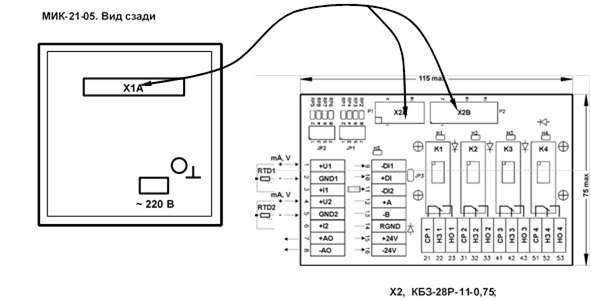
КБЗ-28К-11-0,75; КБЗ-28С-11-0,75
Рисунок Б.2 - Подключение клеммно-блочного соединителя
- КБЗ-28Р-11-0,75 (с реле),
- КБЗ-28К-11-0,75 (с твердотельными реле),
- КБЗ-28С-11-0,75 (с оптосимисторами) к регулятору МИК-21-05
.1 Схема расположения сигналов и габаритные размеры клеммно-
блочного соединителя КБЗ-25-11
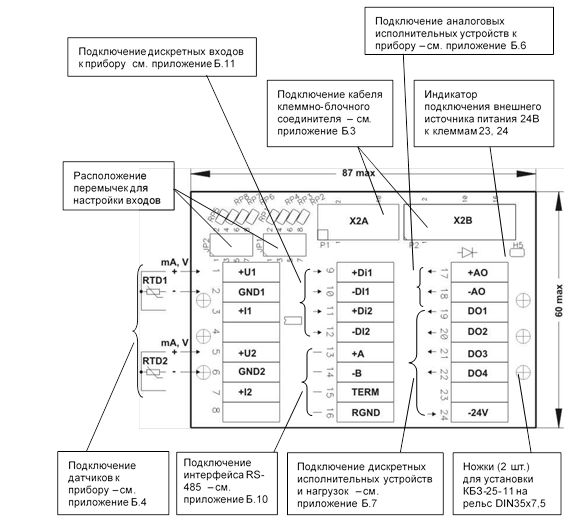
Рисунок Б.3 - Схема расположения сигналов и габаритные размеры клеммно-блочного соединителя КБЗ-25-11
Примечания.
1.Клеммно-блочный соединитель КБЗ-25-11 предназначен для монтажа на рельс DIN35x7,5.
2.Неиспользуемые клеммы клеммно-блочного соединителя КБЗ-25-11 не подключать.
3.Назначение перемычек настройки входов JP1, JP2 – см. приложение Б.1.
.2 Схема расположения сигналов и габаритные размеры клеммно-
блочных соединителей КБЗ-28Р-11, КБЗ-28К-11, КБЗ-28С-11
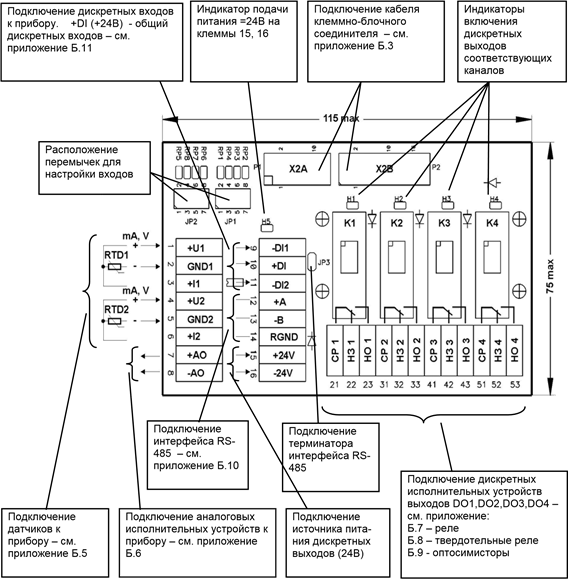
Рисунок Б.4 - Диаграмма расположения сигналов и габаритные размеры клеммно-блочных соединителей КБЗ-28Р-11, КБЗ-28К-11, КБЗ-28С-11
Примечания.
1.Клеммно-блочные соединители КБЗ-28Р-11, КБЗ-28К-11 и КБЗ-28С-11 предназначены для монтажа на рельс DIN35x7,5.
2.Неиспользуемые клеммы клеммно-блочных соединителей КБЗ-28Р-11, КБЗ-28К-11 и КБЗ-28С-11 не подключать.
3.Назначение перемычек настройки входов JP1, JP2 – см. приложение Б.2.
4.Перемычка JP3 предназначена для подключения терминатора (120 Ом), установленного на плате КБЗ-28Р-11, КБЗ-28К-11 или КБЗ-28С-11. Замкнутое состояние JP3 соответствует подключенному терминатору.
.3 - Схема распайки кабеля клеммно-блочных соединителей КБЗ-2511-0,75, КБЗ-28Р-11-0,75, КБЗ-28К-11-0,75 и КБЗ-28С-11-0,75, а также внешние сигналы регулятора:
К КБЗ-25-11, КБЗ-28Р-11 К регулятору МИК-21-05
К КБЗ-28К-11, КБЗ-28С-11
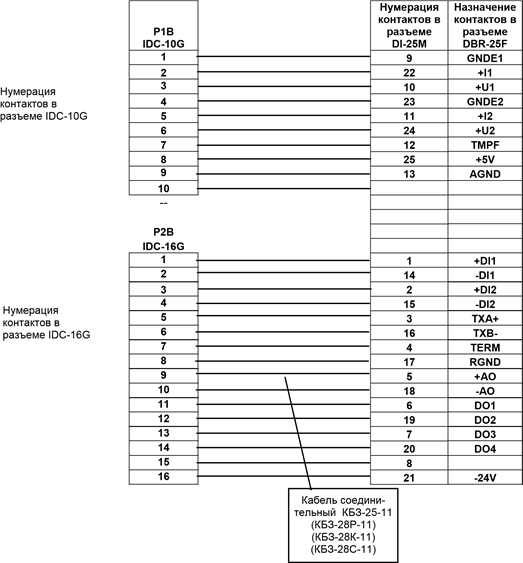
Рисунок Б.5 - Схема распайки кабеля клеммно-блочных соединителей КБЗ-25-11-0,75, КБЗ-28Р-110,75, КБЗ-28К-11-0,75 и КБЗ-28С-11-0,75
Примечание.
Кабель соединителя КБЗ-28Р-11, КБЗ-28К-11 или КБЗ-28С-11 аналогичен кабелю соединителя КБЗ25-11.
.4 датчиков к прибору с помощью КБЗ-25-11
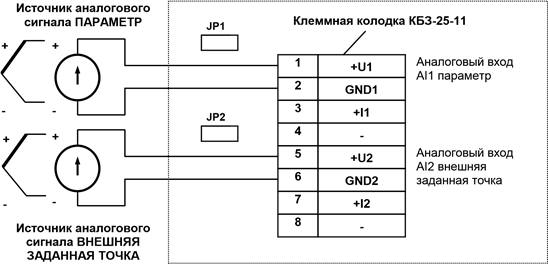
Где JP1 и JP2 – перемычки, установленные на клеммной колодке КБЗ-25-11.
Рисунок Б.6 - Подключение унифицированных аналоговых входов регулятора МИК-21-05
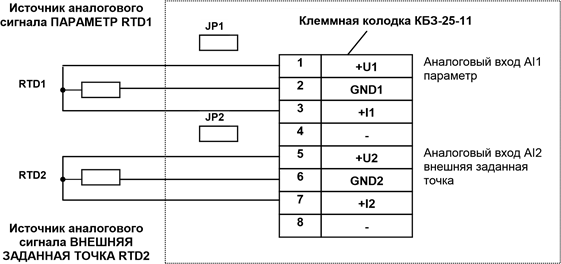
Где JP1 и JP2 – перемычки, установленные на клеммной колодке КБЗ-25-11.
Рисунок Б.7 - Подключение датчиков температуры типа ТСМ, ТСП к аналоговым входам регулятора МИК-21-05
Положение перемычек JP1 и JP2 для настройки входов приведено в таблице:
|
Диапазон входного сигнала |
Вход AI1 Положение перемычки JP1 |
Вход AI2 Положение перемычки JP2 |
|
0 - 5 мА |
[1-2], [7-8] |
[1-2], [7-8] |
|
0 – 20 мА |
[1-2], [5-6] |
[1-2], [5-6] |
|
4 – 20 мА |
[1-2], [5-6] |
[1-2], [5-6] |
|
0 – 10 В |
[2-4], [5-7] |
[2-4], [5-7] |
|
0 - 2 В |
[1-2], [5-7] |
[1-2], [5-7] |
|
0 - 75 мВ |
[1-2], [5-7] |
[1-2], [5-7] |
|
ТСМ, ТСП, Pt, ТЖК (J), ТХК (L), ТХКн (E), ТХА (K), ТПП10 (S), ТПР (B), ТВР-1 (А-1). |
[1-2], [5-7] |
[1-2], [5-7] |
Примечание. Смещение входного сигнала 4-20мА устанавливается программно, см. п.2.01, 3.01 конфигурации.
.5 датчиков к прибору с помощью КБЗ-28Р-11, КБЗ-
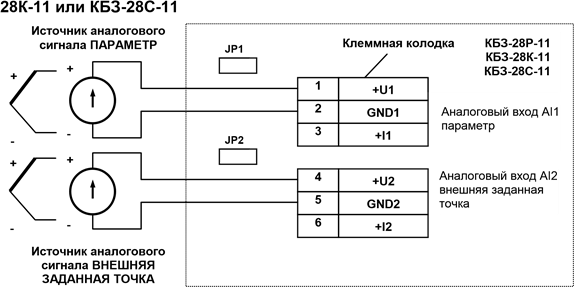
Где JP1 и JP2 – перемычки, установленные на клеммной колодке КБЗ-28Р-11, КБЗ-28К-11, КБЗ-28С-11.
Рисунок Б.8 - Подключение унифицированных аналоговых входов регулятора МИК-21-05
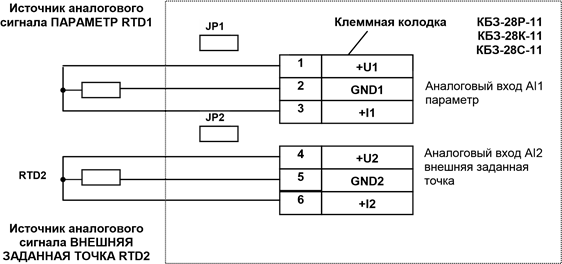 RTD1
RTD1
Где JP1 и JP2 – перемычки, установленные на клеммной колодке КБЗ-28Р-11, КБЗ-28К-11, КБЗ-28С-11.
Рисунок Б.9 - Подключение датчиков температуры типа ТСМ, ТСП к аналоговым входам регулятора МИК-21-05
Положение перемычек JP1 и JP2 для настройки входов приведено в таблице:
|
Диапазон входного сигнала |
Вход AI1 Положение перемычки JP1 |
Вход AI2 Положение перемычки JP2 |
|
0 - 5 мА |
[1-2], [7-8] |
[1-2], [7-8] |
|
0 – 20 мА |
[1-2], [5-6] |
[1-2], [5-6] |
|
4 – 20 мА |
[1-2], [5-6] |
[1-2], [5-6] |
|
0 – 10 В |
[2-4], [5-7] |
[2-4], [5-7] |
|
0 - 2 В |
[1-2], [5-7] |
[1-2], [5-7] |
|
0 - 75 мВ |
[1-2], [5-7] |
[1-2], [5-7] |
|
ТСМ, ТСП, Pt, ТЖК (J), ТХК (L), ТХКн (E), ТХА (K), ТПП10 (S), ТПР (B), ТВР-1 (А-1). |
[1-2], [5-7] |
[1-2], [5-7] |
Примечание. Смещение входного сигнала 4-20мА устанавливается программно, см. п.2.01, 3.01 конфигурации.
.6 исполнительных устройств к аналоговому выходу АО
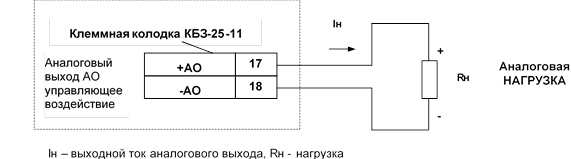
Рисунок Б.10 - Подключение аналоговых нагрузок с помощью КБЗ-25-11
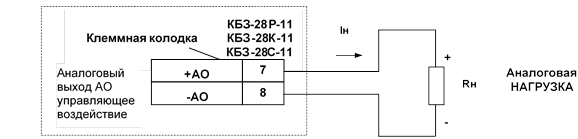
Рисунок Б.11 - Подключение аналоговых нагрузок с помощью КБЗ-28Р-11, КБЗ-28К-11, КБЗ-28С-11
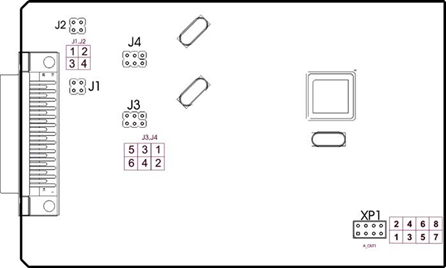
|
Диапазон выходного сигнала |
Положение перемычек на плате процессора (см. рисунок выше) |
|
0 - 5 мА |
[2-4], [7-8] |
|
0 – 20 мА |
[2-4], [5-6] |
|
4 – 20 мА |
[2-4], [5-6] |
|
0 – 10 В |
[1-2], [3-4] |
Примечание. Значение 4мА устанавливается при калибровке аналогового выхода.
Рисунок Б.12 - Положение перемычек на плате процессора для выбора диапазона аналогового выхода
.7 КБЗ-25-11 и КБЗ-28Р-11
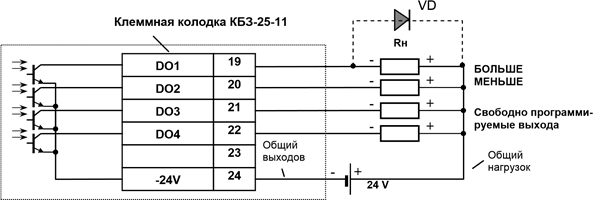
Примечания.
1. При подключении индуктивных нагрузок (реле, пускатели, контакторы, соленоиды и т.п.) к дискретным транзисторным выходам контроллера во избежание выхода из строя выходного транзистора изза большого тока самоиндукции параллельно нагрузке (обмотке реле) необходимо устанавливать блокирующий диод VD – см. схему подключения. Внешний диод устанавливать на каждом канале, к которому подключена индуктивная нагрузка.
Тип устанавливаемого диода КД209, КД258, 1N4004…1N4007 или аналогичный, рассчитанный на обратное напряжение 100В, прямой ток 0,5А.
Рисунок Б.13 - Подключение дискретных нагрузок с помощью КБЗ-25-11
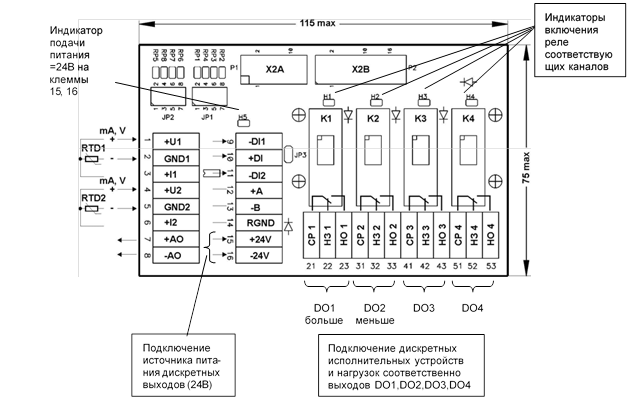
Рисунок Б.14 - Подключение дискретных нагрузок с помощью КБЗ-28Р-11
Примечания по использованию дискретных выходов.
1.Сигналы DO1-DO4 являются свободно-программируемыми. Т.е. если какой-либо из сигналов DO1DO4 не задействован в структуре выбранного типа регулятора (см. параметр 10.03), то свободный дискретный выход может в соответствии с выбранной логикой работы и уставками управляться одним из выбранных аналоговых сигналов (см. параметры 4.00, 5.00, 6.00, 7.00).
2.На диаграмме подключения КБЗ-28Р-11 условно показано расположение и назначение переключающих контактов реле К1, К2, К3, К4.
3.Контакты выходных реле указаны в положении выключено, т.е. при обесточенной обмотке реле.
4.Неиспользуемые клеммы клеммно-блочного соединителя КБЗ-28Р-11 не подключать.
.8 КБЗ-28К-11
Дискретные выходы выполнены в виде твердотельных реле, при этом логическому “0” соответствует разомкнутое положение контактов, а логической “1” - замкнутое состояние выходных контактов реле СР и НО.
Каждый дискретный релейный выход гальванически изолирован от других дискретных выходов и других цепей регулятора.
Индикатор
Индикатор подачи Выходное реле включения реле питания=24В 1-го канала 1-го канала
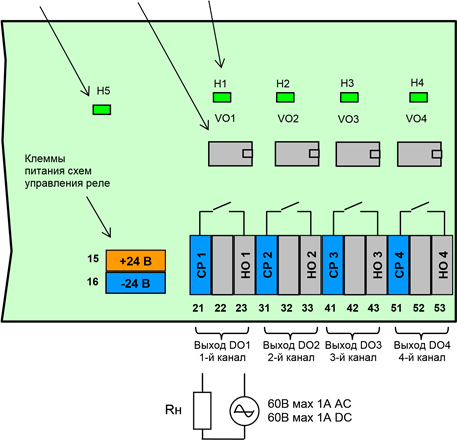
Рисунок Б.15 - Подключение дискретных нагрузок с помощью КБЗ-28K-11
Примечания по использованию дискретных выходов.
1.На рисунке условно показано расположение и назначение замыкающих контактов выходных реле каналов DO1-DO4.
2.Контакты выходных реле указаны в положении выключено, или при обесточенной схеме управления реле.
3.Неиспользуемые клеммы клеммно-блочного соединителя КБЗ-28К-11 не подключать.
4.Максимальное потребление (схем управления) четырех включенных каналов от внешнего источника постоянного тока 24В – 80мА.
5.Напряжение внешнего источника питания - нестабилизированное, (20-28) В постоянного тока.
6.Пара дискретных выходов может выполнять роль одного импульсного выхода (Б –М).
.9 КБЗ-28С-11
Дискретные выходы выполнены в виде оптосимисторов со встроенным детектором нулевого напряжения фазы. Логическому “0” соответствует закрытое состояние симистора , а логической “1” – открытое состояние.
Каждый выход гальванически изолирован от других дискретных выходов и других цепей контроллера.
Индикатор
Индикатор подачи Выходной включения 1-го питания=24В оптосимистор 1- канала
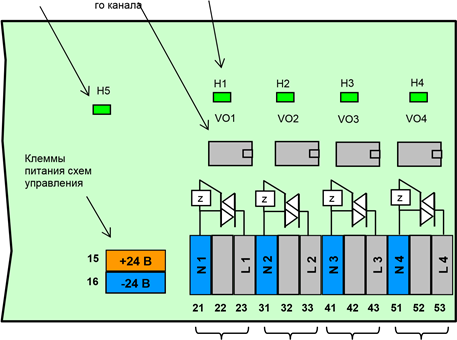
Выход DO1 Выход DO2 Выход DO3 Выход DO4
1-й канал 2-й канал 3-й канал 4-й канал
Рисунок Б.16 - Подключение дискретных нагрузок с помощью КБЗ-28С-11
Примечания по использованию дискретных выходов.
1.На рисунке условно показано расположение и назначение выводов оптосимисторов каналов DO1DO4.
2.Неиспользуемые клеммы клеммно-блочного соединителя КБЗ-28С-11 не подключать.
3.Максимальное потребление (схем управления) четырех включенных каналов от внешнего источника постоянного тока 24В – 80мА.
4.Напряжение внешнего источника питания - нестабилизированное, (20-28) В постоянного тока.
5.Пара дискретных выходов может выполнять роль одного импульсного выхода (Б –М).
Рекомендации по использованию маломощных оптосимисторов.
Маломощные оптосимисторы предназначены для коммутации цепей переменного тока. Оптосимисторы обеспечивают гальваническую изоляцию управляющих цепей от силовых и непосредственно управляют мощными силовыми элементами - полупроводниковыми симисторами, которые открываются импульсом тока отрицательной полярности. Маломощные оптосимисторы могут также управлять парой встречно-параллельно включенных тиристоров.
К одному маломощному оптосимисторному выходу может подключаться только один внешний симистор или одна пара встречно-параллельно включенных тиристоров.
Импульсный выходной ток маломощного оптосимистора может достигать 1А, но только в момент включения внешнего симистора (или пары тиристоров), поэтому нельзя использовать этот выход как релейный, нагружая его постоянной нагрузкой. При подключению внешних симисторов следует учитывать ограничение по управляющему выходному току маломощного выходного оптосимистора.
Каждый выходной оптосимистор с внешним мощным симистором (или парой тиристоров) может быть подключен к любой фазе (А, В или С). Каждый выходной оптосимистор имеет свой встроенный детектор нулевого напряжения фазы позволяет включать нагрузку только при минимальном напряжении на ней.
Рекомендуемые схемы подключения внешних симисторов и нагрузок приведены на рисунке Б.17.
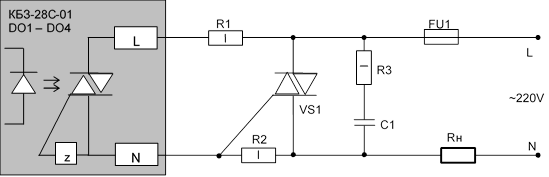
Рисунок Б.17 – Схема подключения внешнего симистора
Б.10 Схема подключения интерфейса RS-485
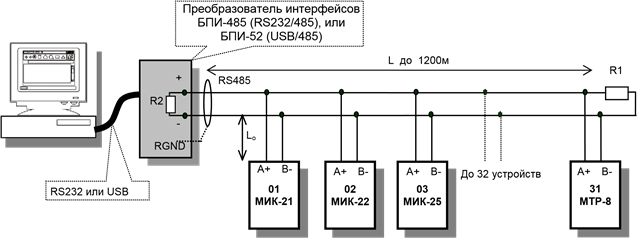
Рисунок Б.18 - Организация интерфейсной связи между компьютером и регуляторами
1. К компьютеру может быть подключено до 32 регуляторов, включая преобразователь интерфейсов БПИ-485 (БПИ-52).
2. Общая длина кабельной линии связи не должна превышать 1200м.
3. В качестве кабельной линии связи предпочтительно использовать экранированную витую пару.
4. Длина ответвлений Lo должна быть как можно меньшей.
5. К интерфейсным входам регуляторов, расположеным в крайних точках соединительной линии необходимо подключить два терминальным резистора сопротивлением 120 Ом (R1 и R2). Подключение резисторов к регуляторам №№ 01 – 30 не требуется. Подключение терминальных резисторов в блоке преобразования интерфейсов БПИ-485 (БПИ-52) смотри в РЭ на БПИ-485 (БПИ-52). Подключение терминальних резисторов в МИК-21-05 смотри приложение Б.10 (рисунок
Б.18, Б.19, Б.20).
http://www.microl.ua МИК-21-05 ver. 05.35 ПРМК.421457.103 . 1.28 30.03.2009
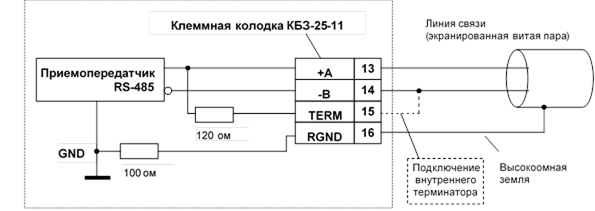
Рисунок Б.19 - Рекомендуемая схема подключения интерфейса RS-485 с помощью КБЗ-25-11
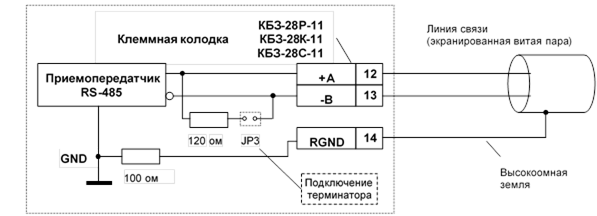
Рисунок Б.20 - Рекомендуемая схема подключения интерфейса RS-485 с помощью КБЗ-28Р-11, КБЗ-28К-11 или КБЗ-28С-11
Примечания по использованию интерфейса RS-485.
1. Все ответвители приемо-передатчиков, присоединенные к одной общей передающей линии, должны согласовываться только в двух крайних точках. Длина ответвлений должна быть как можно меньшей.
2. Необходимость экранирования кабелей, по которым передается информация, зависит от длины кабельных связей и от уровня помех в зоне прокладки кабеля.
3. Применение экранированной витой пары в промышленных условиях является предпочтительным, поскольку это обеспечивает получение высокого соотношения сигнал/шум и защиту от синфазной помехи.
4. Перемычка JP3 предназначена для подключения терминатора (120 Ом), установленного на плате КБЗ-28Р-11, КБЗ-28К-11 или КБЗ-28С-11. Замкнутое состояние JP3 соответствует подключенному терминатору.
Б.11 Подключение дискретных входов (датчиков) к прибору
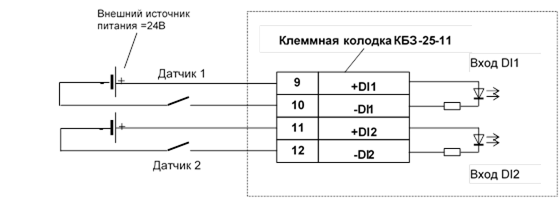
Рисунок Б.21 - Подключение дискретных входов (датчиков) к прибору с помощью КБЗ-25-11
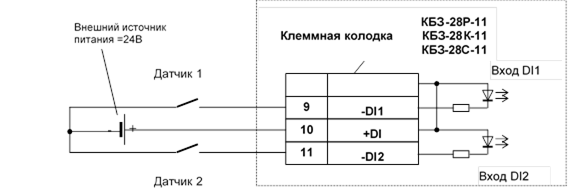
Рисунок Б.22 - Подключение дискретных входов (датчиков) к прибору с помощью КБЗ-28Р-11, КБЗ-28К-11 или КБЗ-28С-11
Примечание. В качестве датчиков дискретных сигналов могут использоваться контакты (реле, переключатели и др.), а также транзисторные ключи (например, открытый коллектор NPN-транзистора).
Приложение В Сводная таблица параметров регулятора МИК-21-05
Таблица В.1 - Сводная таблица параметров регулятора МИК-21-05
|
Пункт меню |
Параметр |
Единицы измерения |
Диапазон изменения параметра |
Значен. по- умолчанию |
Шаг изменения |
Раздел |
Примечание |
|
|
Уровень 1. Настройка параметров регулятора |
|
|||||
|
1.00 |
Коэффициент усиления
|
ед. |
000,1 – 050,0 |
010,0 |
000,1 |
10.5 |
|
|
1.01 |
Время интегрирования
|
сек. |
0000 – 6000 |
0260 |
0001 |
10.5 |
0000 – откл. |
|
1.02 |
Время дифференцирования |
сек. |
0000 – 6000 |
0000 |
0001 |
10.5 |
0000 – откл. |
|
1.03 |
Тип технологической сигнализации |
|
0000 – абсолютная 0001 – девиационная |
0000 |
0001 |
Примечание |
См. рисунок В.2, В.3. |
|
1.04 |
Технологическая сигнализация отклонения «минимум»
|
техн. ед. |
От –9999 до 9999 |
000,0 |
Младший разряд |
Примечание |
С учетом децим. Разделителя входа AI1 |
|
1.05 |
Технологическая сигнализация отклонения «максимум»
|
техн. ед. |
От –9999 до 9999 |
000,0 |
Младший разряд |
Примечание |
С учетом децим. Разделителя входа AI1 |
|
1.06 |
Гистерезис: - технологической сигнализации; - 2-х позиционного; - 3-х позиционного регулятора. |
техн. ед. |
000,0 – 090,0 |
000,0 |
000,1 |
Примечание |
|
|
1.07 |
Условие запуска управления по событию
|
|
0000 –управление постоянное без ожидания события |
0000 |
|
|
Связанные параметры: 4.01, 5.01, 6.01, |
|
|
(событие: параметр в норме, т.е. в зоне технологической сигнализации |
|
0001 –запуск ожидания события после изменения заданной |
|
|
|
7.01 = 0005 или =0006
См. рисунок В.1 |
|
|
МИН-МАКС)
|
|
точки (SP) 0002 – запуск ожидания события после внешней команды (по фронту дискретного входа) |
|
|
|
|
|
1.08 |
Пароль входа в режим конфигурации на УРОВНИ 02 – 19
|
|
0000 – 9999 |
0002 |
|
6.5.5 |
Установлено изготовителем |
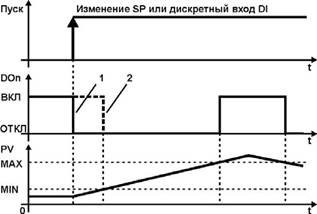
1. «1» – с ожиданием события, «2» – без ожидания события.
2. Логика работы дискретного выхода – вне зоны уставок MIN-MAX.
Рисунок В.1 - Пояснение к п. 1.07. Условие запуска управления по событию
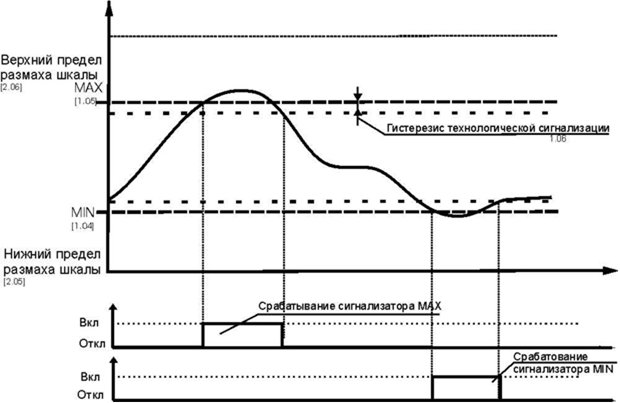
Рисунок В.2 - График срабатывания абсолютной технологической сигнализации (1.03 = 0000)
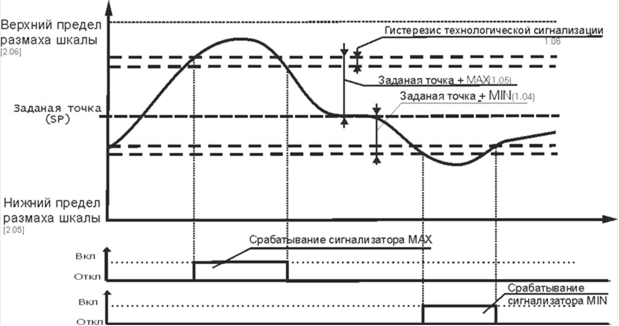
Рисунок В.3 - График срабатывания девиационной технологической сигнализации (1.03 = 0001)
Примечание. Девиационная технологическая сигнализация используется когда нужно сигнализировать отклонение технологического параметра от значения заданной точки на значение уставок MIN[1.04] MAX[1.05], а абсолютная – когда нужно сигнализировать выход параметра за уставки MIN[1.04], MAX[1.05]
|
Пункт меню |
Параметр |
Единицы измерения |
Диапазон изменения параметра |
Значен. по- умолчанию |
Шаг изменения |
Раздел |
Примечание |
|
Уровень 2. Конфигурация аналогового входа AI1 (параметр) 1) |
|||||||
|
2.00 |
Тип шкалы аналогового входа AI1 |
|
0000 – линейный 0001 – квадратический 0002 – ТСМ 50М 0003 – ТСМ 100М 0004 – гр.23 0005 – ТСП 50П, Pt50 0006 – ТСП 100П, Pt100 0007 – гр.21 0008 – линеаризованая шкала 0009 – Термопара линеаризированая 0010 – Термопара ТЖК (J) 0011 – Термопара ТХК (L) 0012 – Термопара ТХКн (E) 0013 – Термопара ТХА (K) 0014 – Термопара ТПП10 (S) 0015 – Термопара ТПР (B) 0016 – Термопара ТВР (A-1) 0017 – интерфейсный ввод |
0000 |
|
11.1.4 |
- Значение записывается с компьютера |
|
2.01 |
Тип входа AI1 |
|
0000 – 0-5, 0-20 мА 0001 – 4-20 мА |
0000 |
|
11.1.4 |
Действует на типы 2.00 = 0, 1, 8 |
|
2.02 |
Количество участков линеаризации входа AI1 |
ед. |
0000 – 0019 |
0000 |
0001 |
11.2 |
Связанные параметры п.п.11.00-11.19 и п.п.12.00-12.19 |
|
2.03 |
Постоянная времени входного цифрового фильтра |
сек. |
000,0 – 060,0 |
000,0 |
000,1 |
Примечание 2 |
000,0 – откл. |
|
2.04 |
Положение децимального разделителя |
|
0000, 000,0 00,00 0,000 |
000,0 |
|
|
|
|
2.05 |
Нижний предел размаха шкалы |
техн. ед. |
-9999 – 9999 |
000,0 |
Младший разряд |
|
|
|
2.06 |
Верхний предел размаха шкалы |
техн. ед. |
-9999 – 9999 |
000,0 |
Младший разряд |
|
|
|
2.07 |
Метод температурной коррекции входных сигналов от термопар |
|
0000 – ручная коррекция 0001 – автоматическая коррекция (по внешнему датчику) |
|
|
|
Т=Тизм+Ткор.руч (см.2.08) Т=Тизм+Ткор.авт
|
|
2.08 |
Значение температуры в режиме ручной коррекции входных сигналов от термопар |
°С |
От –999,9 до 999,9 |
000,0 |
|
|
Ткор.руч При 2.07=0000 |
|
2.09 |
Допустимая длительность импульсной помехи |
с. |
0000 – 005,0 |
|
0,1 |
Примечание 2 |
Защита от импульсных помех |
|
Уровень 3. Конфигурация аналогового входа AI2 (задание, полож.механизма) 1) |
|||||||
|
3.00 …… 3.09 |
Параметры уровня 3 аналогичны параметрам уровня 2 |
|
|
|
|
|
См. параметры уровня 2 |
Примечания по конфигурации аналоговых входов.
1). В структурах регуляторов (см. параметр 10.03=1,2,3,5 и 10.13=1), если аналоговый вход AI2 используется в качестве внешней заданной точки, настройка параметров 3.04, 3.05, 3.06 обязательно должна соответствовать настройке параметров 2.04, 2.05, 2.06 (положение децимального разделителя, нижний предел размаха шкалы и верхний предел размаха шкалы).
Если аналоговый вход AI2 не используется в структуре регулятора, либо выбран режим индикатора (10.03=0000), допускается настройка параметров 3.04, 3.05, 3.06 отличная от настройки параметров 2.04, 2.05, 2.06. Этот режим используется для определения аналогового входа AI2 в качестве источника аналогового сигнала для управления дискретными выходами DO1 - DO4 (см. параметры уровней 4, 5, 6, 7), либо в режиме ретрансмиссии (см. параметры уровня 9).
2) Допустимая длительность импульсной помехи.
Если в каком либо цикле измерения технологического параметра обнаружено его изменение, то предполагается возможность действия помехи и выходной сигнал сформируется (с учетом усреднения измерительных значений) по истечении установленного времени длительности помехи. То есть, если длительность изменения сигнала больше заданного Тпомехи, то это изменение расценивается как естественное и принимается в дальнейшую обработку с задержкой времени Тпомехи.
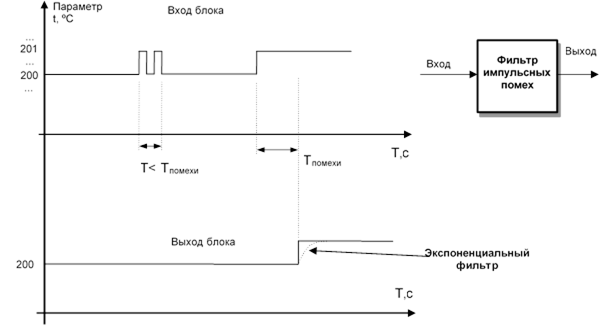
Рисунок В.4 - Влияние допустимой длительности помехи (пункты меню 2.09 или 3.09 для 1-го или 2-го канала соответственно)
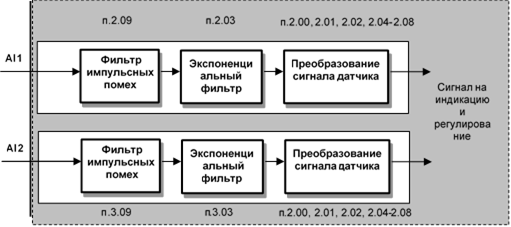
Рисунок В.5 – Функциональная схема программного преобразования входных аналоговых сигналов
|
Пункт меню |
Параметр |
Единицы измерения |
Диапазон изменения параметра |
Значен. по- умолчанию |
Шаг изменения |
Раздел |
Примечание |
|
|
Уровень 4. Конфигурация дискретного выхода DO1 1) |
|
|||||
|
4.00 |
Номер аналогового входа (источник аналогового сигнала) для управления дискретным выходом DO1 |
|
0000 – вход AI1 0001 – вход AI2 0002 – рассогласование регулятора E 0003 – задание регулятора 0004 – выход аналогового регулятора
|
0000 |
|
Примечание 1 |
Е = PV-SP, не- зависимо от типа управления регулятора (прямое, обратное) |
|
4.01 |
Логика работы выходного устройства DO1 |
|
0000 – 0007
0000 – выход не используется 0001 – больше MAX 0002 – меньше MIN 0003 - в зоне MIN-MAX 0004 - в не зоны MIN-MAX (относительно MIN– MAX соответствующего DO) 0005 – вне зоны сигнализации (первое вхождение в норму) по событию или без него (см. п.1.07) 0006 – первое вхождение в норму с имп. выходом _П_ (см. п.1.07) 0007 – интерфейсный вывод |
0001 |
|
|
Выход управляется по интерфейсу |
|
4.02 |
Уставка MIN DO1 |
техн. ед. |
В диапазоне шкалы выбранного типа аналогового сигнала |
020,0 |
000,1 |
|
|
|
4.03 |
Уставка MAX DO1 |
техн. ед. |
В диапазоне шкалы выбранного типа аналогового сигнала |
080,0 |
000,1 |
|
|
|
4.04 |
Гистерезис выходного устройства DO1 |
техн. ед. |
0000 – 9999 |
0010 |
0001 |
|
|
|
4.05 |
Безопасное положение выходного устройства DO1 в случае отказа датчика, линии связи или измерительного канала |
|
0000 – последнее положение 0001 – откл. 0002 – вкл. |
0000 |
|
Примечание 2 |
Работает если 4.00=0000,0001 |
|
4.06 |
Тип выходного сигнала выходного устройства DO1 |
сек. |
000,0 – статический 000,1 – 999,9 – импульсный (динамический) |
|
|
Примечание 3 |
Где 000,1-999,9 – длительность импульса в секундах. См. рисунок В.6 |
|
|
Уровень 5. Конфигурация дискретного выхода DO2 1) |
|
|||||
|
5.00 …… 5.06 |
Параметры уровня 5 аналогичны параметрам уровня 4 |
|
|
|
|
|
См. параметры уровня 4 |
|
|
Уровень 6. Конфигурация дискретного выхода DO3 1) |
|
|||||
|
6.00 …… 6.06 |
Параметры уровня 6 аналогичны параметрам уровня 4 |
|
|
|
|
|
См. параметры уровня 4 |
|
|
Уровень 7. Конфигурация дискретного выхода DO4 1) |
|
|||||
|
7.00 …… 7.06 |
Параметры уровня 7 аналогичны параметрам уровня 4 |
|
|
|
|
|
См. параметры уровня 4 |
Примечания к уровням 4, 5, 6, 7
Примечания по конфигурации дискретных выходов.
1)Сигналы DO1-DO4 являются свободно-программируемыми. Т.е. если какой-либо из сигналов DO1DO4 не задействован в структуре выбранного типа регулятора (см. параметр 10.03), то свободный дискретный выход может в соответствии с выбранной логикой работы и уставками управляться одним из выбранных аналоговых сигналов (см. параметры 4.00, 5.00, 6.00, 7.00).
2)Состояние соответствующего дискретного выхода:
2.1.Выход отключен, при условии, если 4.05=0000 или 0001.
2.2.Выход включен при недостоверных данных измерительного канала при отказах датчика, линии связи или измерительного преобразователя (см. параметр 4.00), при условии, если 4.05=0002.
3)Тип выходного сигнала – импульсный. Логика работы дискретного выхода – меньше уставки MIN. Длительность импульсного сигнала установлена 3 секунды.
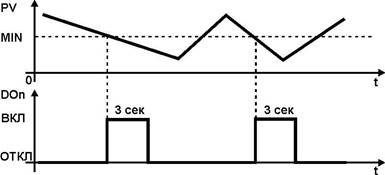
Рисунок В.6 - График работы дискретного выхода при импульсном типе выходного сигнала
|
Пункт меню |
Параметр |
Единицы измерения |
Диапазон изменения параметра |
Значен. по- умолчанию |
Шаг изменения |
Раздел |
Примечание |
|
|
Уровень 8. Конфигурация дискретных входов |
||||||
|
8.00 |
Назначение дискретного входа DI1 |
|
0000 – вход не исп.
0001 0002 0003 0004 0005 0006 0007 |
|
|
|
См. таблицу ниже
|
|
8.01 |
Назначение дискретного входа DI2 |
|
Аналогично входу DI1
|
|
|
|
См. таблицу ниже |
|
8.02 |
Индикация состояния дискретных входов DI1 и DI2 на дисплее ПАРАМЕТР*1 |
|
0 0 1 1 \ \--------Вход DI1 \---------Вход DI2
|
|
|
|
1 – соответствует включенному входу, т.е. на вход подано напряжение 24В
|
|
|
Уровень 9. Конфигурация функции ретрансмиссии AO |
||||||
|
9.00 |
Функция ретрансмиссии.
Источник сигнала для управления аналоговым выходом AO |
|
0000 – вход AI1 0001 – вход AI2 0002 – рассогласование регулятора (50%+E) 0003 – текущее задание регулятора |
|
|
5.9 |
функция ретрансмиссии работает во всех структурах регуляторов кроме 10.03=0001 |
|
9.01 |
Начальное значение входного сигнала равное 0% выходного сигнала или для п. 9.03=0004 – значение рассогласования регулятора, что соответствует 0% выходного сигнала (для АІ<SP) |
техн. ед. |
-9999 – 9999 |
0000 |
0001 |
|
В единицах измеряемой величины |
|
9.02 |
Конечное значение входного сигнала равное 100% выходного сигнала или для п. 9.03=0004 – значение рассогласования регулятора, что соответствует 100% выходного сигнала (для АІ>SP) |
техн. ед. |
-9999 – 9999 |
0100 |
0001 |
|
В единицах измеряемой величины |
|
9.03 |
Направление и ограничение выходного сигнала АО для ретрансмисси или для аналогового ПИДрегулятора* |
|
0000 – прямой 0001 – инверсный 0002 – прямой с ограничением выходного физического сигнала 0003 – инверсный с ограничением выходного физического сигнала 0004 – прямой асимметричный для ретрансмиссии рассогласования регулятора |
0000 |
|
|
АО = у АО = 100% - у
см. рис. В.7 |
Примечания.
* Используется если необходимо сделать инверсию выхода регулятора для НЗ, НО исполнительных механизмов. При каждом изменении этого параметра следует с помощью пунктов меню (18.01 и 18.02) настроить 0% и 100% выходного сигнала.
Примечания к уровню 8
Примечание. Пояснение к п.8.00 и 8.01 Назначение и режимы работы дискретных входов DI1 и DI2.
|
Значение параметра в п.п. 8.00 или 8.01 |
Состояние входного сигнала DI1 или DI2 |
Состояние микроконтроллера и режима работы (РУЧ-АВТ) |
|
0000 |
Не используется |
Не используется для регулятора, но может работать для п.1.07=0002 |
|
0001 – статический |
"1" |
- Регулятор в ручном режиме, панель блокирована. |
|
|
"0" |
- Регулятор в автоматическом режиме, панель разблокирована. |
|
0002 – статический |
"1" |
- Регулятор в автоматическом режиме, панель блокирована. |
|
|
"0" |
- Регулятор в ручном режиме, панель разблокирована. |
|
0003 – импульсный |
АВТ РУЧ |
- АВТОМАТ (фронт – А (ДСТ, ЛОК)), |
|
(по фронту) |
не менее 0,5 сек. |
РУЧНОЙ (спад – Р (РУЧ)) или - запуск ожидания события, если выбрано условие запуска управления по внешнему дискретному входу DI1 см. параметр 1.07=0002 Панель не блокируется |
|
0004 |
"1" |
- БОЛЬШЕ или 100% аналогового сигнала - управление исполнительным механизмом в ручном режиме. |
|
0005 |
"1" |
- МЕНЬШЕ или 0% аналогового сигнала - управление исполнительным механизмом в ручном режиме. |
|
0006 – сигналы от конечного выключателя исполнительного механизма |
"1" "1" |
- DI1 – 0% положения ИМ (ИМ полностью закрыт) - DI2 – 100% положен. ИМ (ИМ полностью открыт) |
|
0007 |
"0"
"1" |
- Внутреннее задание ЛОК
- Внешнее задание, коррекция задания ДСТ, см. п.10.13= 0001 – внешняя заданная точка; 0002 – коррекция заданной точки. |
Примечания.
1.Состояния дискретного входа:
"0" – на вход не подано =24В, "1" – на вход подано =24В.
2.Минимальная длительность сигнала на дискретном входе DI1 и DI2 не менее 0,5 секунд.
3.Если исполнительный механизм полностью закроется или откроется, то сработают концевые выключатели. Сигнал с этих выключателей можно подать на дискретные входы DI1 и DI2 и тем самым показать регулятору когда ИМ достигнет крайнего состояния.
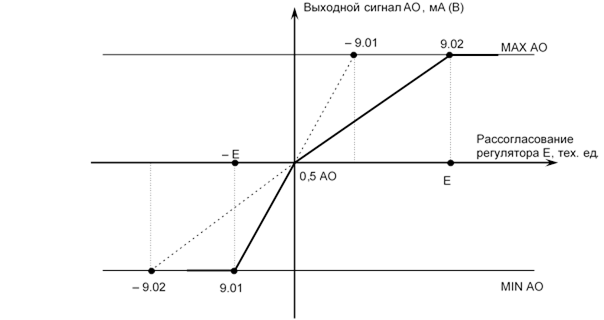
Рисунок В.7 – График работы ретрансмиссии рассогласования регулятора Е для 9.03=0004.
|
Пункт меню |
Параметр |
Единицы измерения |
Диапазон изменения параметра |
Значен. по- умолчанию |
Шаг изменения |
Раздел |
Примечание |
|
Уровень 10. Конфигурация структуры регулятора |
|
||||||
|
10.00 |
- Время механизма Тм. - Период ПИД-ШИМ регулятора - Период обработки данных итерационным регулятором |
сек. |
000,0 – 999,9 |
060,0 |
000,1 |
|
10.03=3 10.03=2
10.03=6 |
|
10.01 |
- Минимальная длитель-ность импульса Тмин - Максимальная длительность импульса итерационного регулятора |
сек. |
000,0 – 999,9 |
002,0 |
000,1 |
|
10.03=2;3
10.03=6 |
|
10.02 |
Зона нечувствительности 3-х позиционного и ПИД-регулятора (мертвая зона) |
техн. ед. |
000,0 – 999,9 |
000,0 |
000,1 |
Примечание |
Данный параметр представляет половинное значение зоны |
|
10.03 |
Тип регулятора |
|
0000 – индикатор 0001 – аналоговый ПИД-регулятор 0002 – ПИД-ШИМрегулятор 0003 – импульсный ПИД-регулятор 0004 – 3-х позицион. 0005 – 2-х позицион. 0006 – импульсный итерационный П-регулятор |
0001 |
|
5.8 |
импульсный ПИД-регулятор возможно использовать с концевыми выключателями исп. механизма подключенными к дискретным входам DI1 и DI2 |
|
10.04 |
Тип управления регулятора*2 |
|
0000 – обратное 0001 – прямое |
0000 |
|
Примечание |
E = SP – PV E = PV – SP |
|
10.05 |
Задержка срабатывания ключей БОЛЬШЕ, МЕНЬШЕ |
сек. |
000,1 – 060,0 |
000,1 |
000,1 |
Примечание |
Задержка на включение ключа БОЛЬШЕ после выключения ключа МЕНЬШЕ и наоборот |
|
10.06 |
Статическая балансировка задания |
|
0000 – отключена 0001 – включена |
0000 |
|
6.4.2 |
|
|
10.07 |
Скорость динамической балансировки задания |
техн. ед/мин |
000,0 – 999,9 |
200,0 |
000,1 |
6.4.2 |
|
|
10.08 |
Ограничение МИН аналогового выхода |
% |
-9,9 – 109,9 |
000,0 |
000,1 |
Примечание *4 |
|
|
10.09 |
Ограничение МАКС аналогового выхода |
% |
-9,9 – 109,9 |
099,9 |
000,1 |
Примечание *4 |
|
|
10.10 |
Разрешение ограничения выхода (в РУЧНОМ режиме) |
|
0000 - в АВТ режиме 0001 - в АВТ и РУЧ |
0000 |
|
Примечание *3 |
|
|
10.11 |
Безопасное положение выхода регулятора в случае отказа датчика, линии связи или измерительного канала |
|
0000 – последнее положение 0001 – 0% (откл.) 0002 – 100% (вкл.) 0003 – безопасное положение устанавливаемое пользователем |
0000 |
|
|
10.11=0,1,2, если тип регулятора 10.03=6 |
|
10.12 |
Значение безопасного положения устанавливаемого пользователем |
% |
0,0 – 099,9 |
000,0 |
000,1 |
|
При 10.11=0003 |
Примечания.
*1) Задержка срабатывания ключей БОЛЬШЕ, МЕНЬШЕ – это время паузы, после которого возможно изменение направления движения исполнительного механизма при соответствующем рассогласовании (с целью защиты схем управления от лишних включений и самого электродвигателя).
*2) Логика работы 2-х позиционного прямого и обратного регулятора показана на рисунке В.8. 3-х позиционный регулятор работает только в обратном типе управления регулятора. На рисунке В.9 показана работа выходов регулятора – DO1(больше) и DO2 (меньше). Толстой линией показана работа выходов регулятора без использования гистерезиса (1.06=0000). Если введен гистерезис, то регулятор будет работать полностью по рисунку В.9. Как видно из рисунка, когда параметр растет и становится чуть больше заданной точки, то возникает ситуация когда включены два выхода. Это не допустимо когда регулятор управляет реверсивным двигателем. Для избежание подобной ситуации необходимо использовать параметр 10.02 – зона нечувствительности 3-х позиционного регулятора (мертвая зона). Тогда выходы регулятора будут работать по логике показанной на рисунке В.8.
*3) При параметре равном 0000 ограничение выхода действует только в автоматическом режиме, а при 0001 – в автоматическом и ручном режиме.
*4) Ограничение управляющих воздействий. Границы данного параметра находятся в пределах около –10% и +110%. Все же следует обратить внимание на то, что регулятор не может выдавать отрицательные токи. Если управляющее воздействие в ограниченном рабочем режиме достигает одной из величин (-10%, +110%), то дальнейшая интеграция будет прервана с тем, чтобы избежать интегрального насыщения. Тем самым гарантируется, что после инверсии полярности рассогласования регулирования тот час может последовать изменение управляющего воздействия.
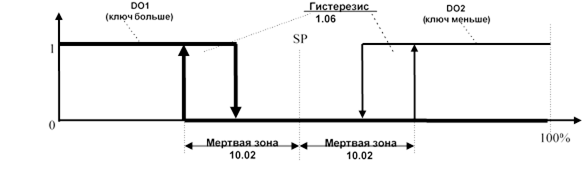
Рисунок В.8 - График работы дискретных выходов 3-х позиционного регулятора с использованием зоны нечувствительности (10.02)
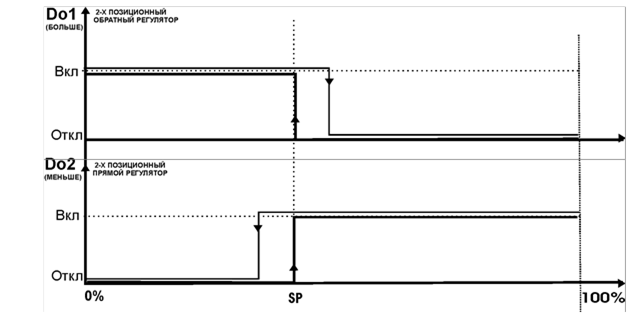
Рисунок В.9 - График работы 3-х позиционного регулятора с использованием гистерезиса но без зоны нечувствительности 2-х позиционного прямого и обратного регулятора.
|
Пункт меню |
Параметр |
Единицы измерения |
Диапазон изменения параметра |
Значен. по- умолчанию |
Шаг изменения |
Раздел |
Примечание |
|
|
Уровень 10. Конфигурация структуры регулятора (окончание) |
||||||
|
10.13 |
Назначение аналогового входа AI2 |
|
0000 – не использ. 0001 – внешняя заданная точка 0002 – коррекция заданной точки SP = SPвнут+K*X2+B 0003 – обратная связь по положению механизма импульсного регулятора 0004 – вход коррекции У1=Х1+К*Х2+В 0005 – вход предварения управляющего воздействия регулятора 0006 – индикация положение импульсного механизма |
0000 |
|
5.9 |
X1=Ai1 X2=Ai2
С внешней ОС
У1 – входной сигнал на регулятор после коррекции
С внутренней ОС |
|
10.14 |
Коэффициент коррекции K |
|
-9,99 – 99,99 |
01,00 |
00,01 |
6.4.5.3 |
10.03=0002,0004 Децимальный разделитель входа AI1 |
|
10.15 |
Смещение при коррекции B |
|
-9999 – 9999 |
0000 |
0001 |
6.4.5.3 |
|
|
10.16 |
Тип коррекции |
|
0000 - статическая 0001 - динамическая |
0000 |
|
6.4.5.3 |
п. 10.13 |
|
10.17 |
Ограничение MIN входа AI2 для функций коррекции или предварения |
|
-9999 – 9999 |
0000 |
000,1 |
|
п. 10.13 |
|
10.18 |
Ограничение MАХ входа AI2 для функций коррекции или предварения |
|
-9999 – 9999 |
099,9 |
000,1 |
|
п. 10.13 |
|
10.19 |
Структура ПИД регулятора |
|
0000 – paralel 0001 – mixed |
0000 |
0001 |
10.4 |
Раздел 10.4 |
|
|
Уровень 11. Абсциссы опорных точек линеаризации входа AI1 |
||||||
|
11.00 |
Абсцисса начального значения (в % от входного сигнала) |
% |
00,00 – 99,99 |
|
00,01 |
11.2 |
Связанные параметры п.п.2.00=0008, п.п.2.02=0-19, п.п.12.00-12.19 |
|
11.01 |
Абсцисса 01-го участка |
% |
00,00 – 99,99 |
|
00,01 |
11.2 |
|
|
…… |
|
|
|
|
|
|
|
|
11.19 |
Абсцисса 19-го участка |
% |
00,00 – 99,99 |
|
00,01 |
11.2 |
|
|
|
Уровень 12. Ординаты опорных точек линеаризации входа AI1 |
||||||
|
12.00 |
Ордината начального значения (сигнал в технических единицах) |
техн. ед. |
От -9999 до 9999 |
0000 |
Младший разряд |
11.2 |
Связанные параметры п.п.2.00=0008, п.п.2.02=0-19, п.п.11.00-11.19 |
|
12.01 |
Ордината 01-го участка |
техн. ед. |
От -9999 до 9999 |
0000 |
Младший разряд |
11.2 |
|
|
…… |
|
|
|
|
|
|
|
|
12.19 |
Ордината 19-го участка |
техн. ед. |
От -9999 до 9999 |
0000 |
Младший разряд |
11.2 |
|
|
|
Уровень 13. Абсциссы опорных точек линеаризации входа AI2 |
||||||
|
13.00 …… 13.19 |
Параметры уровня 13 аналогичны параметрам уровня 11 |
% |
00,00 – 99,99 |
|
00,01 |
11.2 |
Связанные параметры п.п.3.00=0008, п.п.3.02=0-19, п.п.14.00-14.19 |
|
|
Уровень 14. Ординаты опорных точек линеаризации входа AI2 |
||||||
|
14.00 …… 14.19 |
Параметры уровня 14 аналогичны параметрам уровня 12 |
техн. ед. |
От -9999 до 9999 |
0000 |
Младший разряд |
11.2 |
Связанные параметры п.п.3.00=0008, п.п.3.02=0-19, п.п.13.00-13.19 |
Приложение В. (Окончание)
Конец таблицы В.1 - Сводная таблица параметров регулятора МИК-21-05
|
Пункт меню |
Параметр |
Единицы измерения |
Диапазон изменения параметра |
Значен. по- умолчанию |
Шаг изменения |
Раздел |
Примечание |
|
|
Уровень 15. Параметры сетевого обмена |
|
|||||
|
15.00 |
Сетевой адрес (номер прибора в сети) |
|
0000 – 0255 |
0000 |
0001 |
7 |
0000 – отключен от сети |
|
15.01 |
Скорость обмена |
бит/с |
0000 – 2400 0001 – 4800 0002 – 9600 0003 – 14400 0004 – 19200 0005 – 28800 0006 – 38400 0007 – 57600 0008 – 76800 0009 – 115200 0010 – 230400 0011 – 460800 0012 – 921600 |
0009 |
0001 |
7 |
|
|
15.02 |
Тайм-аут кадра запроса в системных тактах 1 такт = 250 мкс |
|
0001– 0200 |
0004 |
0001 |
7 |
|
|
15.03 |
Код и модель изделия. Версия программного обеспечения |
|
|
05.ХХ |
|
|
Служебная информация Код 05 Версия ХХ |
|
15.04 |
Коррекция показаний датчика термокомпенсации |
|
|
|
000,1 |
|
|
|
|
Уровень 16*1. Калибровка входа AI1 |
|
|||||
|
16.00 |
Калибровка нуля |
тех. ед |
-9999 - 9999 |
|
|
11.1 |
примечание *2) |
|
16.01 |
Калибровка максимума |
тех. ед |
-9999 - 9999 |
|
|
11.1 |
|
|
|
Уровень 17*1. Калибровка входа AI2 |
|
|||||
|
17.00 |
Калибровка нуля |
тех. ед |
-9999 - 9999 |
|
|
11.1 |
|
|
17.01 |
Калибровка максимума |
тех. ед |
-9999 - 9999 |
|
|
11.1 |
|
|
|
Уровень 18*1. Калибровка аналогового выхода (AO) |
|
|||||
|
18.00 |
Тест аналогового выхода |
% |
0000 – 100,0 |
|
|
11.3 |
|
|
18.01 |
Калибровка нуля аналогового выхода AO |
|
0000 – 0200 |
0001 |
|
11.3 |
|
|
18.02 |
Калибровка максимума аналогового выхода AO |
|
0,500 – 1,500 |
0.001 |
|
11.3 |
|
|
|
Уровень 19. Разрешение программирования. Запись |
|
|||||
|
19.00 |
Разрешение входа на УРОВНИ 2 – 19 |
|
0000 – запрещено 0001 – разрешено |
|
|
6.5.5 |
|
|
19.01 |
Запись параметров в энергонезависимую память |
|
0000 – запрещено 0001 – разрешено |
|
|
6.5.5 |
|
|
19.02 |
Типы панелей индикации |
|
0000 – AI1-SP-OUT 0001 – AI1-SP-OUT или AI1-AI2-OUT 0002 – AI1-SP-OUT или AI1-AI2-DIN/DOT |
0000 |
|
6.4.4 |
|
Примечание. Уровни конфигурации и настроек см. раздел 6.5 главы 6.
*1) Редактирование уровней возможно только когда регулятор переведен в ручной режим.
*2) При нажатии клавиши Завд. включается автоматическая калибровка, что сопровождается миганием параметра 00 или 01 при калибровке нуля или максимума соответственно. Клавиша ВВІД фиксирует новое значение калибровки. Калибровку необходимо осуществить два раза.

про публікацію авторської розробки
Додати розробку